
磁悬浮轴承系统及其控制方法、装置和存储介质.pdf

阳炎****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
磁悬浮轴承系统及其控制方法、装置和存储介质.pdf
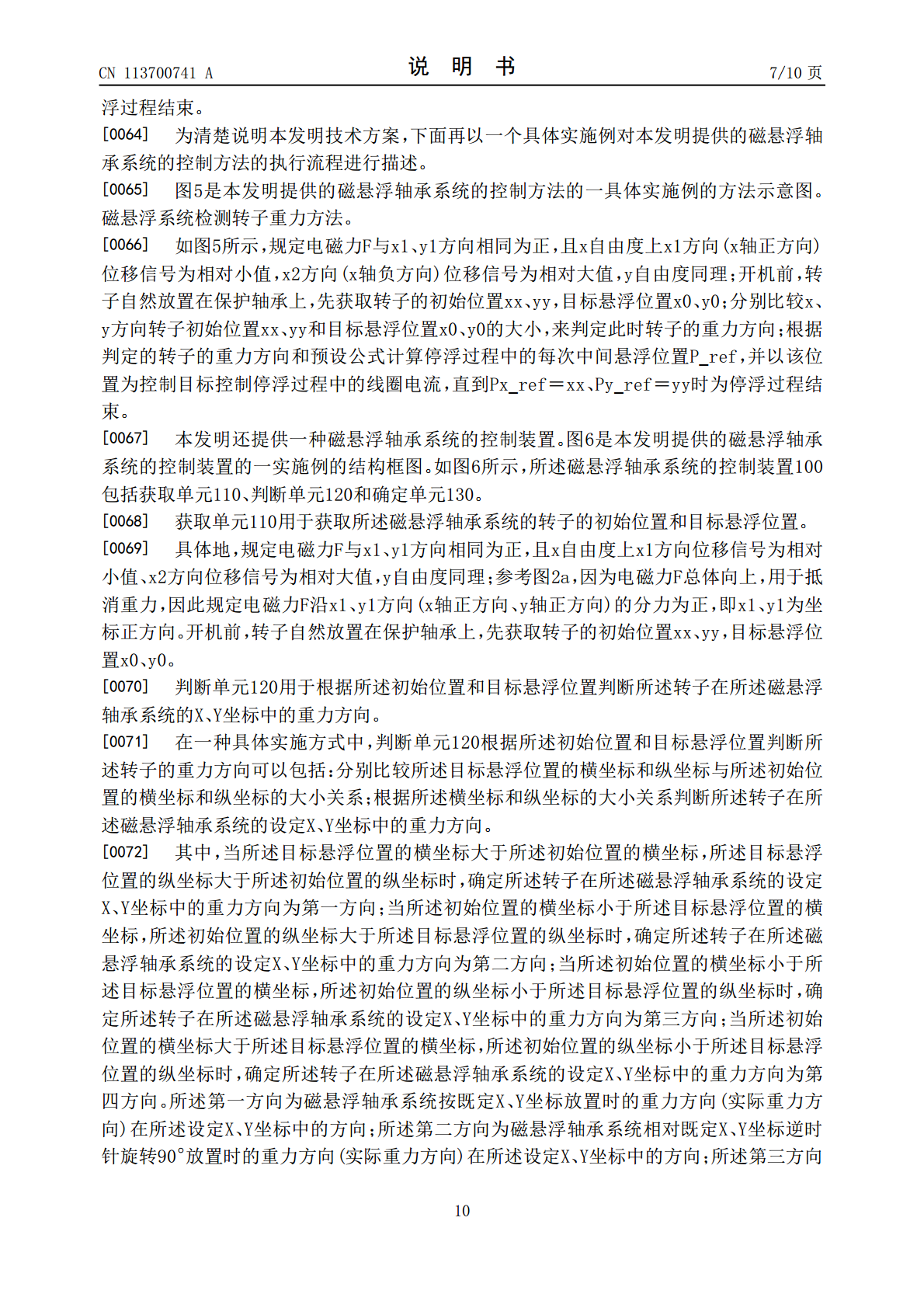
本发明提供一种磁悬浮轴承系统及其控制方法、装置和存储介质,所述方法包括:获取所述磁悬浮轴承系统的转子的初始位置和目标悬浮位置;根据所述初始位置和目标悬浮位置判断所述转子在所述磁悬浮轴承系统的设定X、Y坐标中的重力方向;其中,所述设定X、Y坐标相对于所述磁悬浮轴承系统固定;根据所述转子在所述磁悬浮轴承系统的设定X、Y坐标中的重力方向确定所述转子停浮过程中的中间悬浮位置,从而基于所述中间悬浮位置控制所述转子停浮。本发明提供的方案能够实现在相对既定X、Y坐标任意旋转放置的情况,均可有效实现转子稳定停浮。
磁悬浮离心式压缩机系统及其控制方法、装置和存储介质.pdf
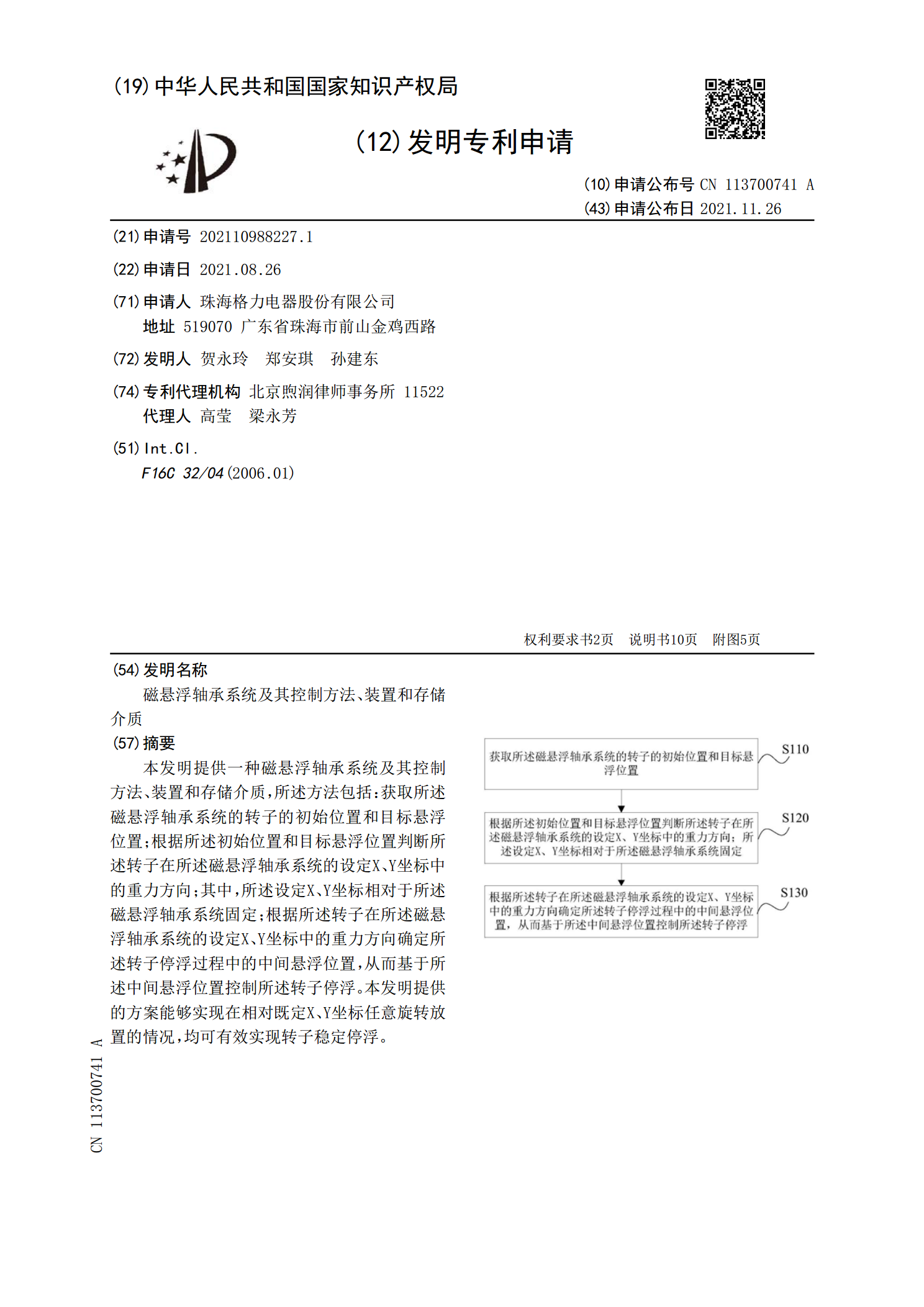
本发明提供一种磁悬浮离心式压缩机系统及其控制方法、装置和存储介质,所述磁悬浮离心式压缩机系统包括磁悬浮离心式压缩机、冷凝器和蒸发器,在所述压缩机的排气口与冷凝器之间的排气管路上设置有止回阀;在所述压缩机的排气口与蒸发器之间设置有第一管路,在所述第一管路上设置有可控阀门;在所述压缩机运行时,所述可控阀门处于关闭状态。本发明提供的方案能够将磁悬浮离心式压缩机停机过程中存留于止回阀和压缩机段的高压气体和转子惰转过程中叶轮继续压缩产生的高压气体一起泄放到蒸发器中,从而减小压缩机吸气腔内的压力,有效避免了压缩机吸气
成像系统及其控制方法、控制装置和存储介质.pdf
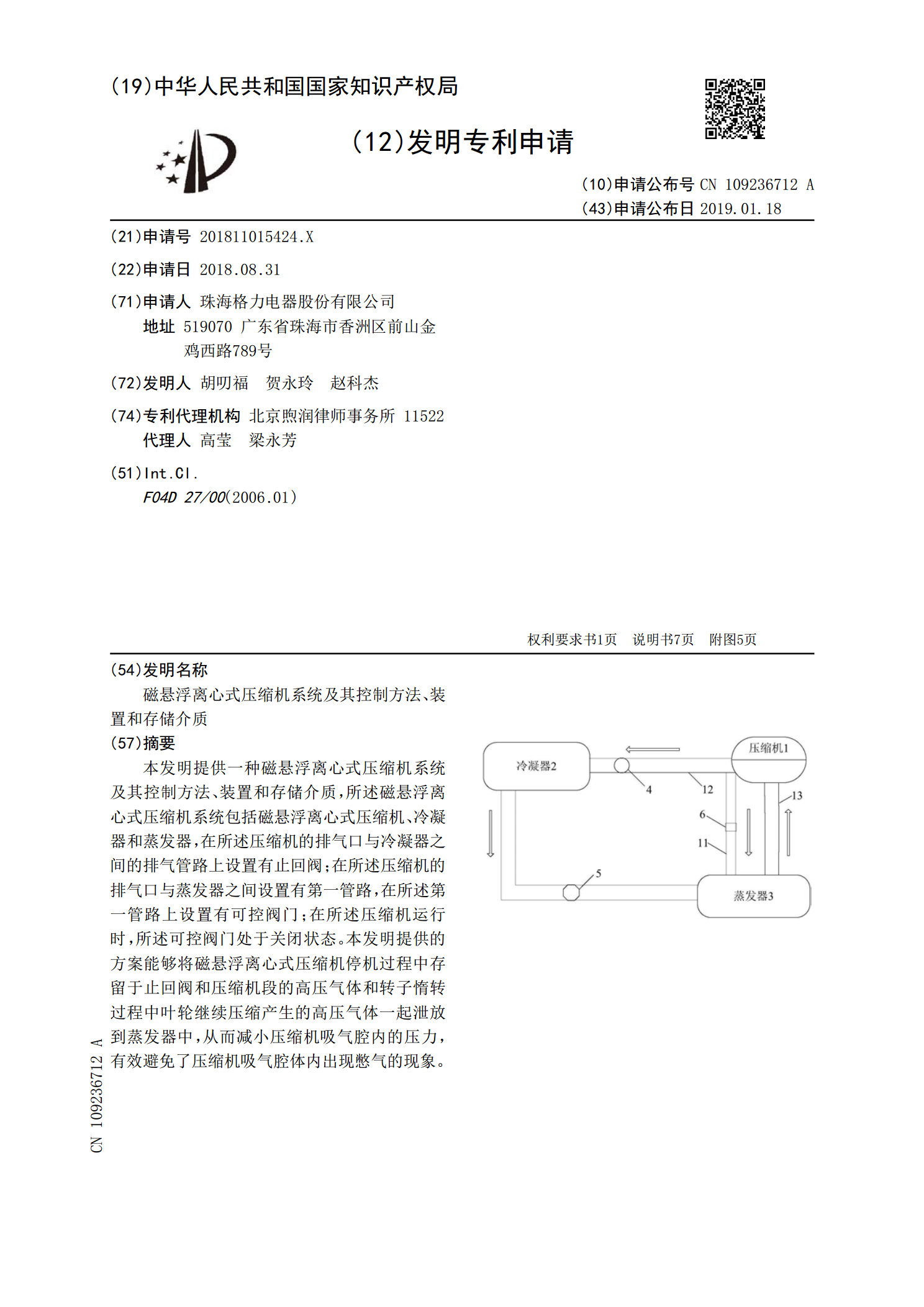
公开一种成像系统及其控制方法、控制装置和存储介质,涉及显示领域,用于降低显示能耗。该控制方法包括:在调光透镜运动至设定位置时,确定物距;根据物距,计算显示装置的显示图像通过调光透镜形成的虚像到调光透镜的像距;和,根据计算出的像距、以及像距与显示图像的分辨率的对应关系,确定与计算出的像距相对应的分辨率,并控制显示装置以所确定的分辨率显示所述显示图像。本公开提供的控制方法,改善了成像系统中应用处理器图像渲染压力过大、发热严重的问题,同时改善了成像系统中电量消耗过快的问题。
装置及其控制方法和存储介质.pdf
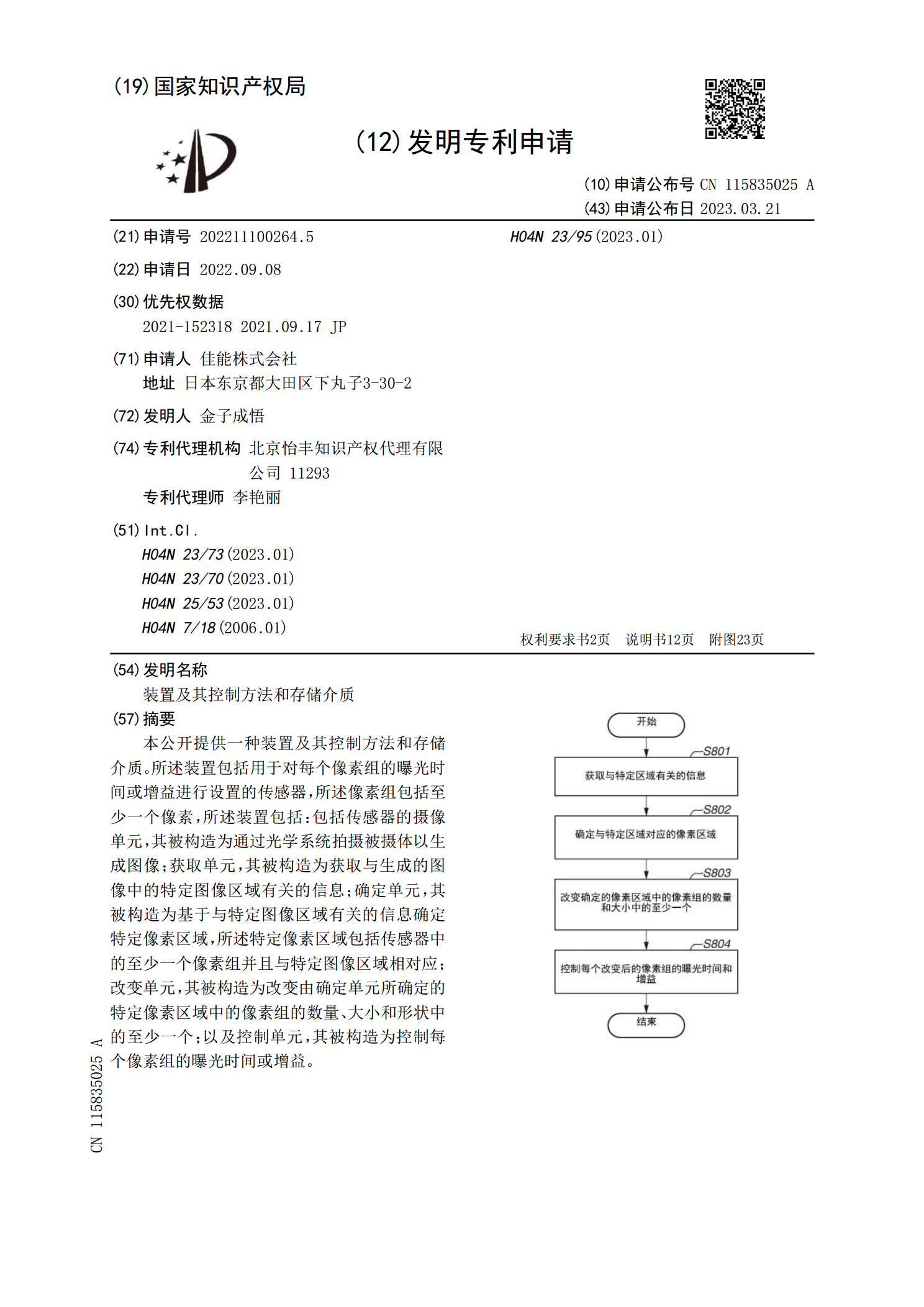
本公开提供一种装置及其控制方法和存储介质。所述装置包括用于对每个像素组的曝光时间或增益进行设置的传感器,所述像素组包括至少一个像素,所述装置包括:包括传感器的摄像单元,其被构造为通过光学系统拍摄被摄体以生成图像;获取单元,其被构造为获取与生成的图像中的特定图像区域有关的信息;确定单元,其被构造为基于与特定图像区域有关的信息确定特定像素区域,所述特定像素区域包括传感器中的至少一个像素组并且与特定图像区域相对应;改变单元,其被构造为改变由确定单元所确定的特定像素区域中的像素组的数量、大小和形状中的至少一个;以

空调系统及其控制方法、装置、存储介质.pdf
本申请涉及智能家电技术领域,公开一种空调系统,包括:冷媒换热模组,其室内换热器至少具有冷媒换热管段、辐射工质换热管段和空气通道,其被配置为能够使冷媒换热管段、辐射工质换热管段和空气通道中的任意两者或三者进行热交换;辐射模组,与辐射工质换热管段连接并构造为室内辐射工质循环回路;其中室内换热器可受控地与外部进行热交换,和/或,向辐射模组供冷/供热以通过辐射模组与外部进行热交换。本公开实施例的空调系统本在不影响冷媒换热模组、辐射模组各自正常工作的情况下,有效简化了系统整体的结构设计,减少了部件数量,降低了生产制