
基于地形先验的机载多通道雷达幅相误差估计方法.pdf

兴朝****45

1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于地形先验的机载多通道雷达幅相误差估计方法.pdf
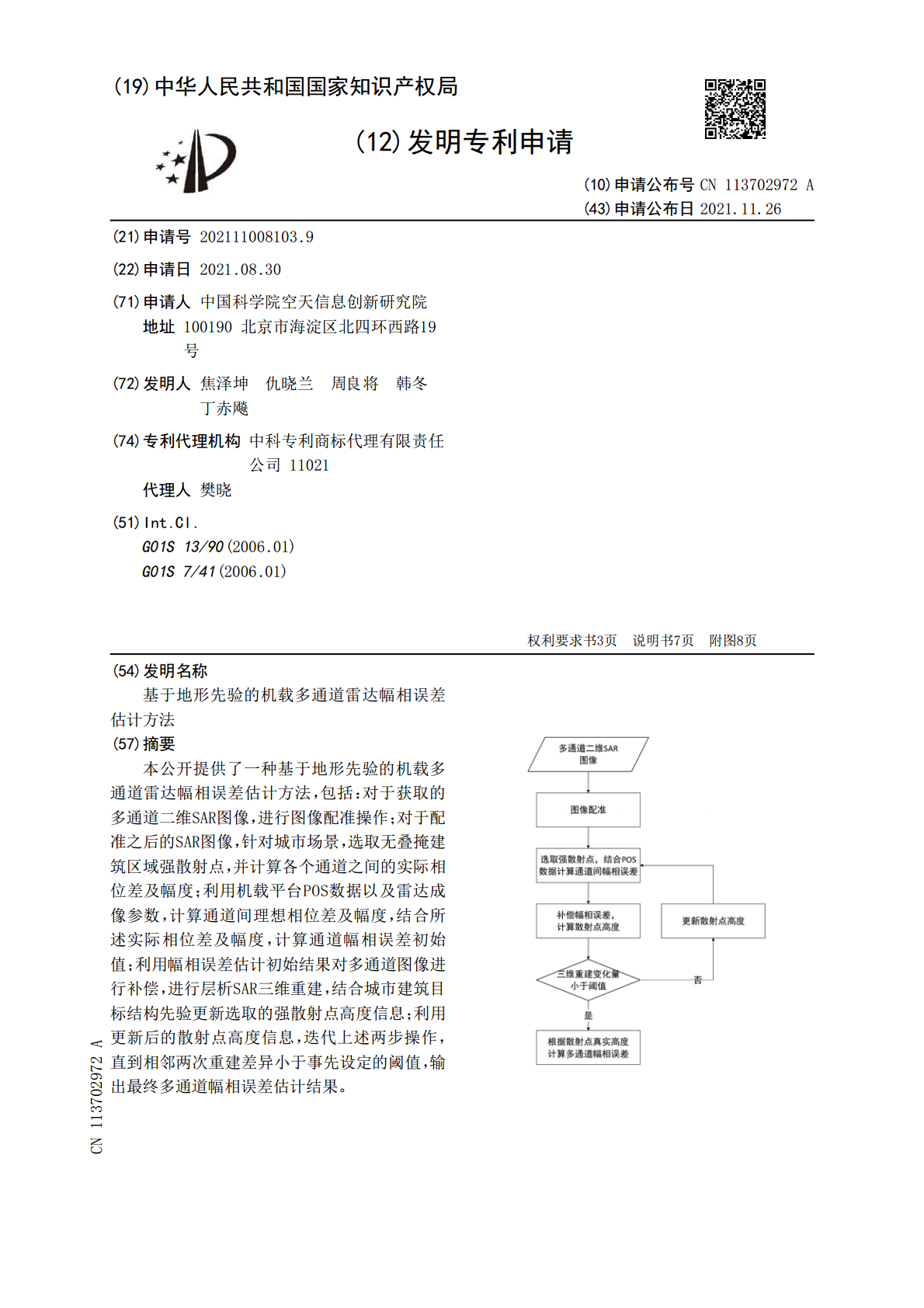
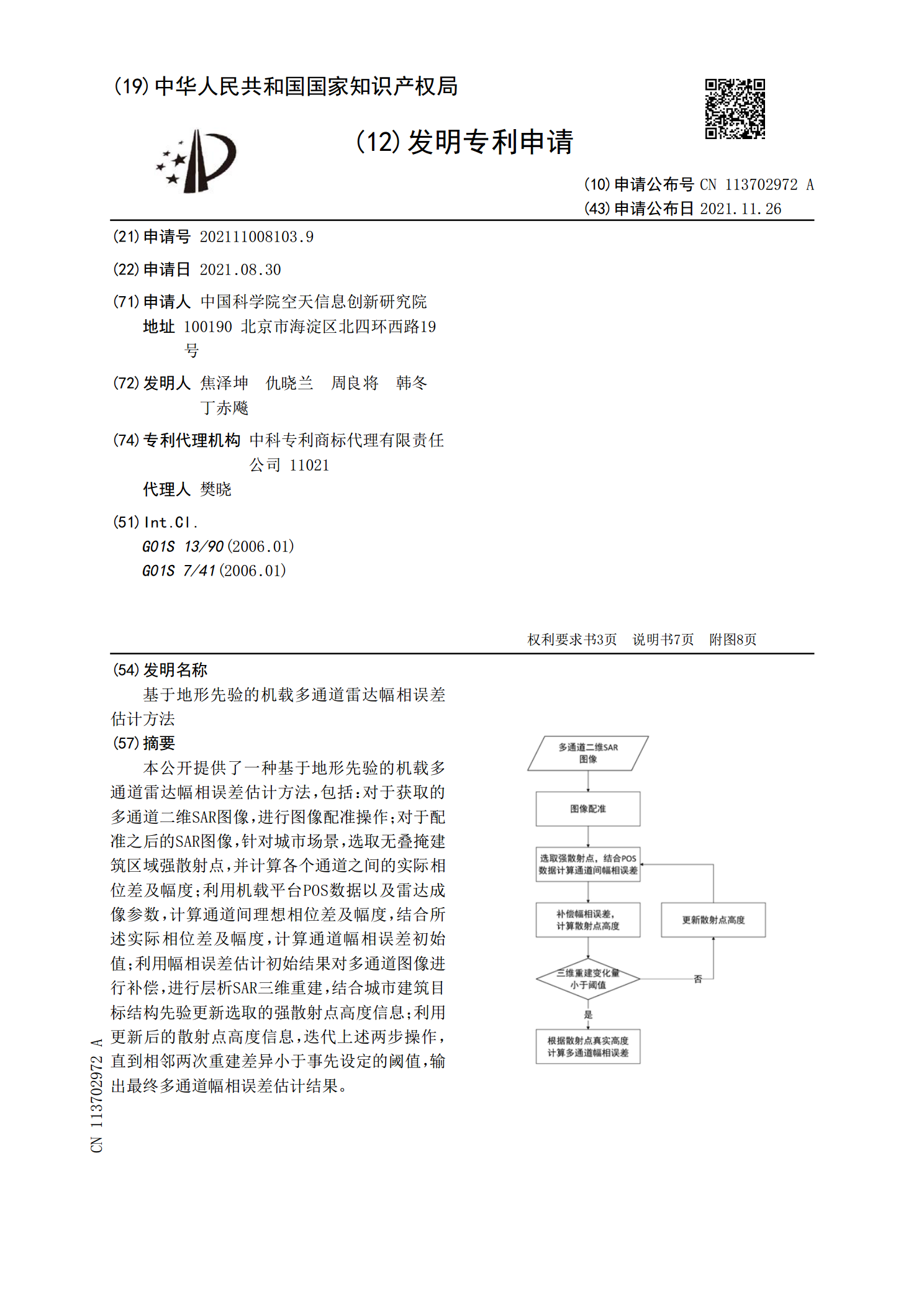
本公开提供了一种基于地形先验的机载多通道雷达幅相误差估计方法,包括:对于获取的多通道二维SAR图像,进行图像配准操作;对于配准之后的SAR图像,针对城市场景,选取无叠掩建筑区域强散射点,并计算各个通道之间的实际相位差及幅度;利用机载平台POS数据以及雷达成像参数,计算通道间理想相位差及幅度,结合所述实际相位差及幅度,计算通道幅相误差初始值;利用幅相误差估计初始结果对多通道图像进行补偿,进行层析SAR三维重建,结合城市建筑目标结构先验更新选取的强散射点高度信息;利用更新后的散射点高度信息,迭代上述两步操作,

基于相位交织的相控阵雷达通道幅相误差在线监测和校正方法.docx
基于相位交织的相控阵雷达通道幅相误差在线监测和校正方法一、引言相控阵雷达是目前应用广泛的雷达技术之一,它具有高分辨率、抗干扰、指向性强等特点,适用于航空、海洋、导弹等多个领域。然而,在复杂的电磁环境下,相控阵雷达通道之间的传输误差会导致产生幅相误差,从而影响雷达性能。因此,相控阵雷达通道幅相误差的在线监测和校正是保障雷达性能的重要手段。本文主要讨论基于相位交织技术实现相控阵雷达通道幅相误差在线监测和校正的方法,并通过实验验证其有效性。二、相位交织技术原理相位交织是一种通道校正技术,它利用相位推迟和旋转的方

基于多体作用的原子连续耦合方法的先验误差估计.pptx
汇报人:目录PARTONEPARTTWO原子连续耦合方法的背景原子连续耦合方法的基本原理原子连续耦合方法的应用领域PARTTHREE多体作用在原子连续耦合方法中的作用多体作用对原子连续耦合方法的影响多体作用在原子连续耦合方法中的实现方式PARTFOUR先验误差估计方法的定义和意义先验误差估计方法的实现步骤先验误差估计方法的优缺点分析PARTFIVE实验验证的必要性实验验证的方法和步骤实验验证的结果和结论PARTSIX先验误差估计方法的改进方向分析先验误差估计方法的改进方法和步骤先验误差估计方法改进的预期效

一种基于双通道空间谱估计结构的阵列幅相误差校正方法.docx
一种基于双通道空间谱估计结构的阵列幅相误差校正方法一种基于双通道空间谱估计结构的阵列幅相误差校正方法摘要:阵列幅相误差是阵列信号处理中常见且有影响的问题之一。为了减小阵列幅相误差的影响,本文提出了一种基于双通道空间谱估计结构的阵列幅相误差校正方法。该方法利用双通道空间谱估计结构对阵列幅相误差进行估计和校正,从而提高阵列信号处理的性能。实验证明,该方法能够有效降低阵列幅相误差,提高信号处理的准确性和可靠性。关键词:阵列信号处理,幅相误差,空谱估计,双通道结构1.引言阵列信号处理是一种常用的信号处理技术,广泛
基于MMSE误差准则的先验信噪比估计方法.pdf
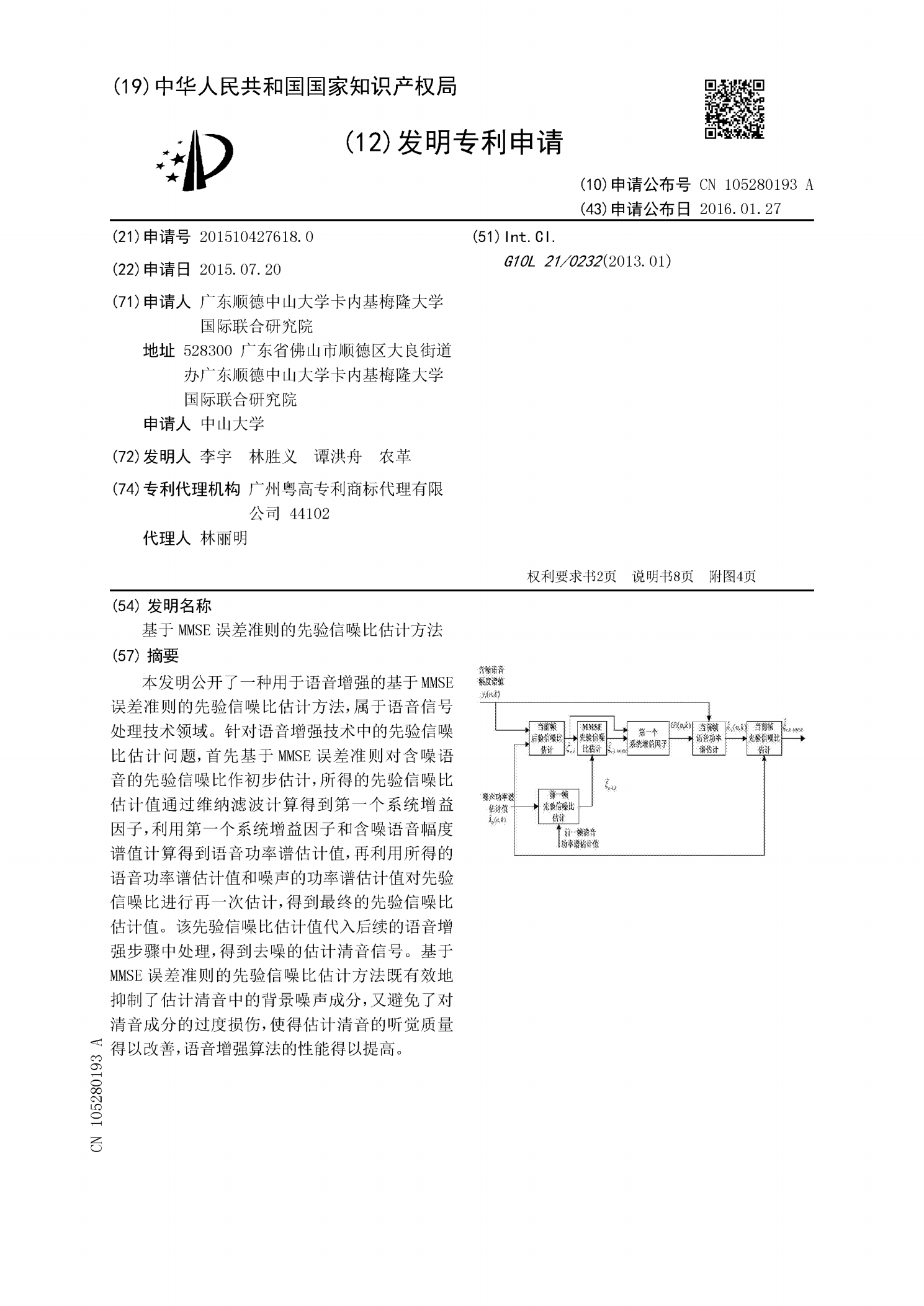
本发明公开了一种用于语音增强的基于MMSE误差准则的先验信噪比估计方法,属于语音信号处理技术领域。针对语音增强技术中的先验信噪比估计问题,首先基于MMSE误差准则对含噪语音的先验信噪比作初步估计,所得的先验信噪比估计值通过维纳滤波计算得到第一个系统增益因子,利用第一个系统增益因子和含噪语音幅度谱值计算得到语音功率谱估计值,再利用所得的语音功率谱估计值和噪声的功率谱估计值对先验信噪比进行再一次估计,得到最终的先验信噪比估计值。该先验信噪比估计值代入后续的语音增强步骤中处理,得到去噪的估计清音信号。基于MMS