
一种基于辐射噪声干涉条纹特征的声源深度判别方法.pdf

森林****来了

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于辐射噪声干涉条纹特征的声源深度判别方法.pdf
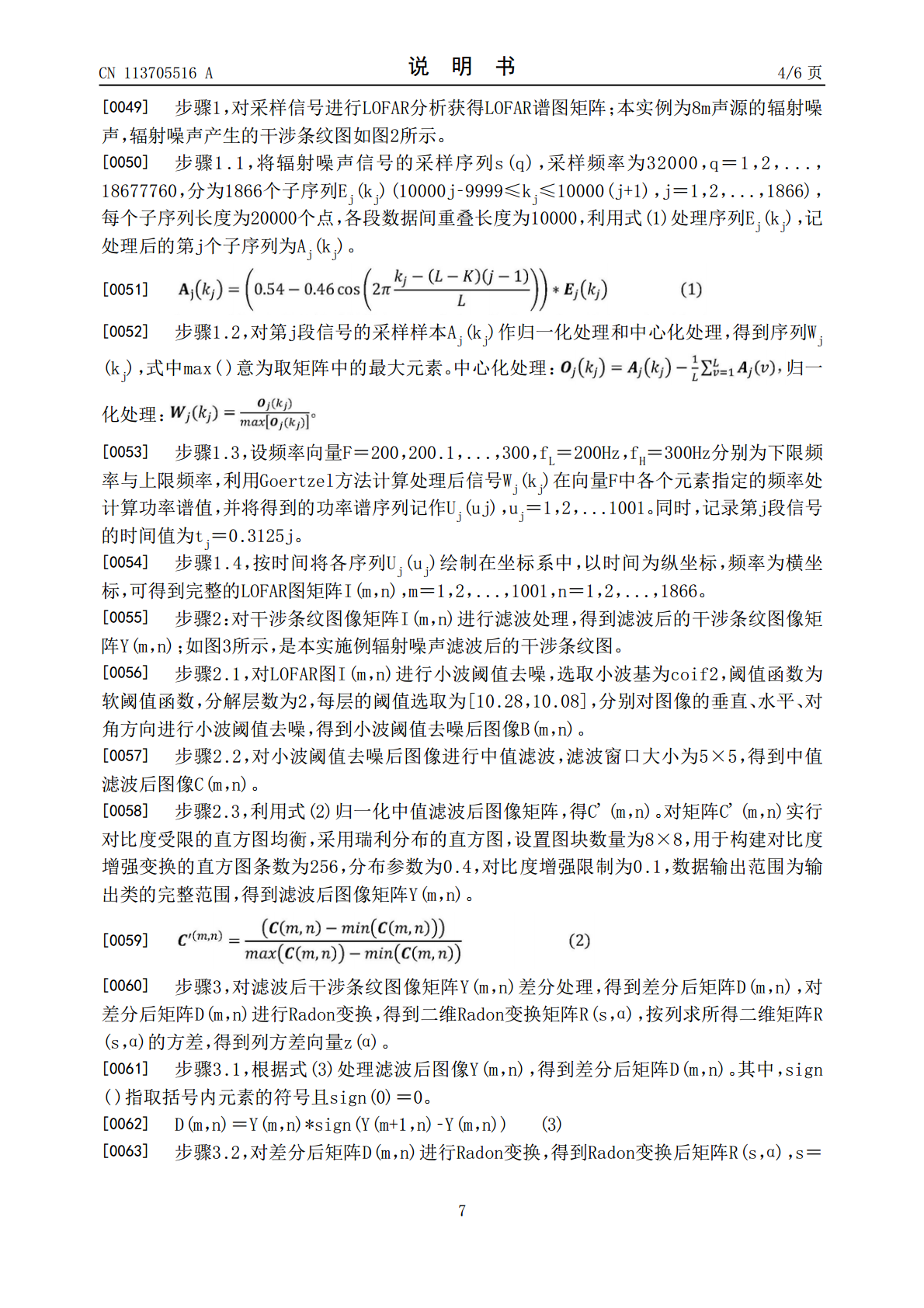
本发明公开了一种基于辐射噪声干涉条纹特征的声源深度判别方法,包括以下步骤:(1)对辐射噪声信号采样序列进行LOFAR分析,得到干涉条纹图像矩阵。(2)对步骤1中生成的干涉条纹图像矩阵进行滤波处理,得到滤波后的干涉条纹图像矩阵。(3)对步骤2中生成的滤波后的干涉条纹图像矩阵进行差分处理,并对差分处理后的图像矩阵进行Radon变换,得到二维Radon变换矩阵,按列求所得二维Radon变换矩阵的方差,得到列方差向量。(4)判断步骤3中得到的列方差向量的峰值个数。(5)若步骤4中得到的峰值个数超过门限值,则判断辐

基于浅海声信道特征测量的舰船水下辐射噪声源级获取方法.docx
基于浅海声信道特征测量的舰船水下辐射噪声源级获取方法基于浅海声信道特征测量的舰船水下辐射噪声源级获取方法摘要:舰船的水下辐射噪声是影响水下声学环境的重要因素之一,其源级是评估舰船噪声影响的关键参数。而在实际测量过程中,由于浅海环境的影响,水下信号常常受到衰减、延迟等干扰,使得水下辐射噪声源级的获取面临着困难。本文提出了一种基于浅海声信道特征测量的舰船水下辐射噪声源级获取方法,通过对声射线模型和声传播等效距离进行优化,可以有效降低信道干扰,提高噪声源级测量的精度和可靠性。关键词:舰船水下辐射噪声;源级;声信

多噪声干涉条纹图像的检测方法.docx
多噪声干涉条纹图像的检测方法多噪声干涉条纹图像的检测方法摘要:干涉条纹图像是一种常用于测量光学波面形貌和物体表面形状的技术。然而,在实际应用中,由于环境因素的影响,干涉条纹图像往往会受到多种噪声的干扰,进而影响测量结果的准确性和可靠性。本论文基于现有研究的基础,综述了多噪声干涉条纹图像的检测方法,并分析了各种方法的优缺点。最后,对未来的研究方向进行了展望。1.引言随着科技的进步和需求的增长,干涉条纹图像在工程、测量和检测领域中的应用越来越广泛。然而,由于光学系统本身的特性以及环境因素的影响,干涉条纹图像常

一种利用辐射噪声估计运动声源速度的方法.pdf
本发明提供了一种利用辐射噪声估计运动声源速度的方法,利用传感器获取噪声信号并记录,对记录的信号进行滤波预处理,代入待定参数,通过Doppler‑CT方法得到信号的时频分布,从时频分布中提取瞬时频率变化曲线,基于最小二乘准则得到待定参数估计值,不断迭代,直至Doppler‑CT迭代收敛,即可得到准确的速度估计值。本发明的有益效果是在拟合多普勒效应导致的瞬时频率变化曲线时,相比PCT一般需要估计多达10个多项式系数,本发明仅需要估计速度等4个参数,因而有效地提高了计算效率。

一种基于条纹密度和方向的干涉条纹图滤波方法.docx
一种基于条纹密度和方向的干涉条纹图滤波方法基于条纹密度和方向的干涉条纹图滤波方法摘要:干涉条纹图像是具有条纹结构的图像,常用于测量物体表面的形貌和形变。然而,由于环境噪声和图像采集设备的限制,干涉条纹图像往往存在较多的噪声和不完整条纹。为了提高干涉条纹图像的质量和清晰度,本文提出了一种基于条纹密度和方向的干涉条纹图滤波方法。该方法首先通过条纹密度估计方法对干涉条纹图像进行分割,然后根据条纹的方向进行滤波处理,最后使用图像重建算法还原滤波后的干涉条纹图像。实验结果表明,该方法能够有效地去除噪声和不完整条纹,