
一种终端设备及其控制方法和装置.pdf

一只****iu

1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种终端设备及其控制方法和装置.pdf
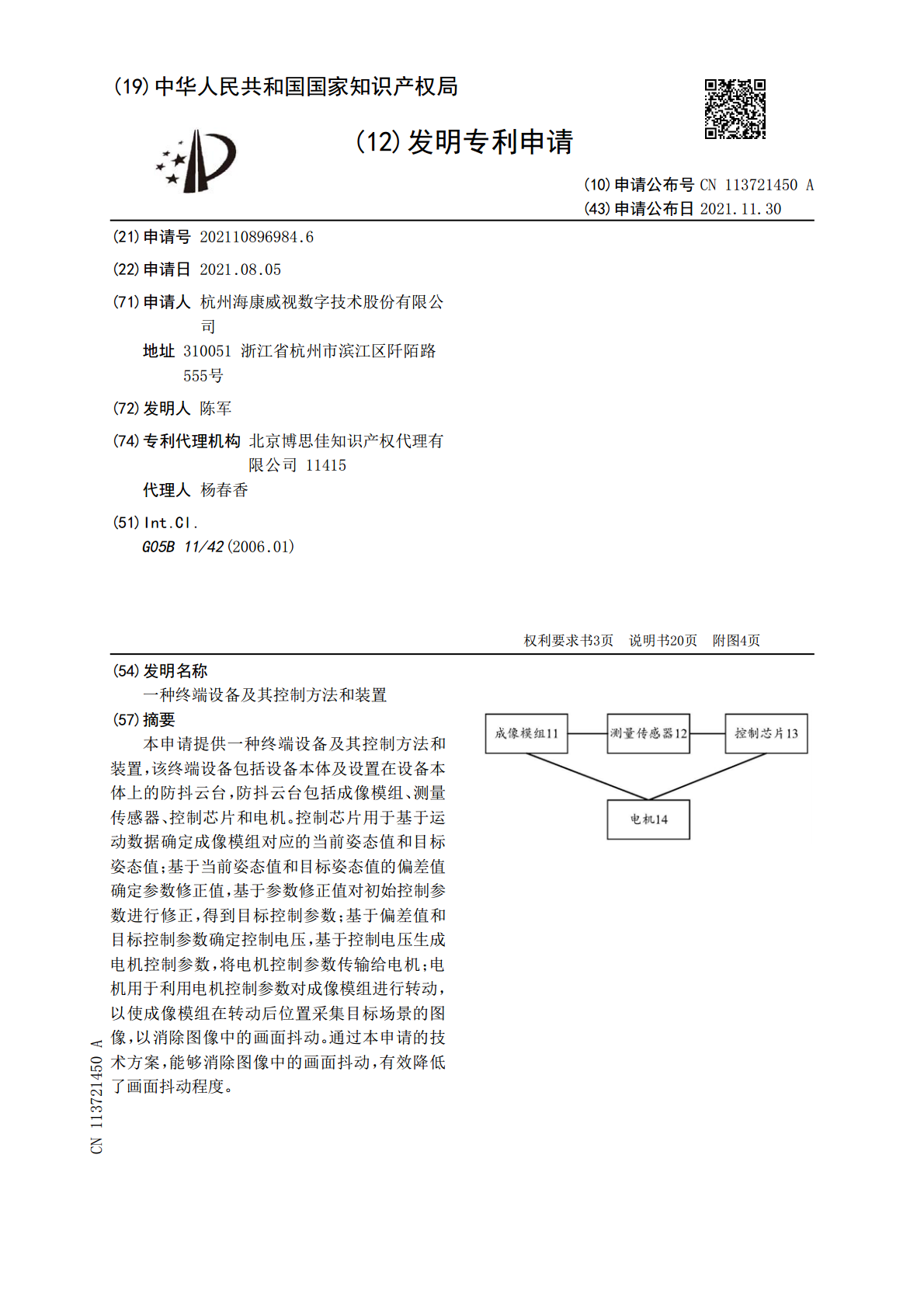
本申请提供一种终端设备及其控制方法和装置,该终端设备包括设备本体及设置在设备本体上的防抖云台,防抖云台包括成像模组、测量传感器、控制芯片和电机。控制芯片用于基于运动数据确定成像模组对应的当前姿态值和目标姿态值;基于当前姿态值和目标姿态值的偏差值确定参数修正值,基于参数修正值对初始控制参数进行修正,得到目标控制参数;基于偏差值和目标控制参数确定控制电压,基于控制电压生成电机控制参数,将电机控制参数传输给电机;电机用于利用电机控制参数对成像模组进行转动,以使成像模组在转动后位置采集目标场景的图像,以消除图像中
终端设备及其控制方法和装置.pdf
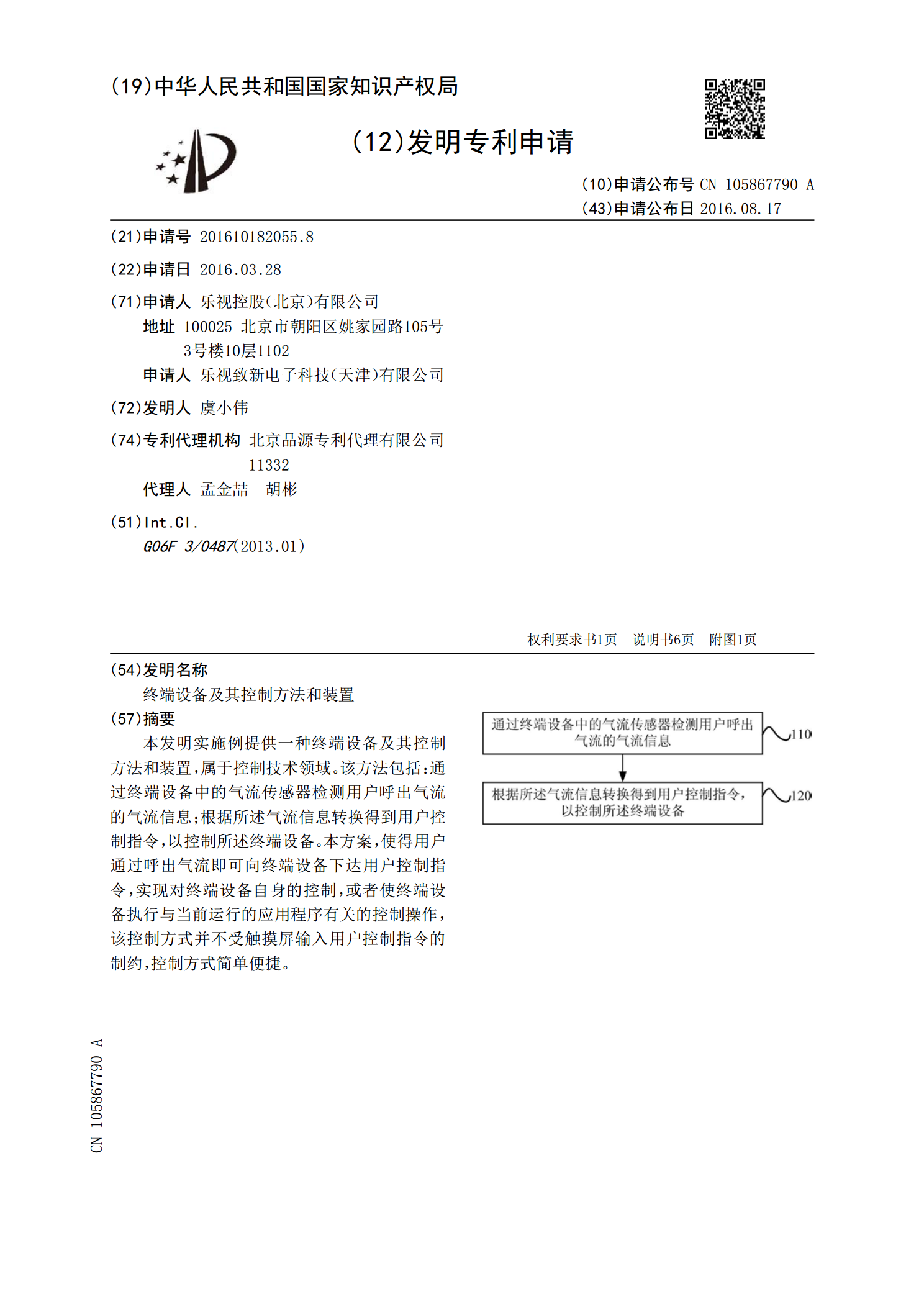
本发明实施例提供一种终端设备及其控制方法和装置,属于控制技术领域。该方法包括:通过终端设备中的气流传感器检测用户呼出气流的气流信息;根据所述气流信息转换得到用户控制指令,以控制所述终端设备。本方案,使得用户通过呼出气流即可向终端设备下达用户控制指令,实现对终端设备自身的控制,或者使终端设备执行与当前运行的应用程序有关的控制操作,该控制方式并不受触摸屏输入用户控制指令的制约,控制方式简单便捷。

一种控制方法、控制装置和终端设备.pdf
本公开实施例提供一种控制方法,涉及终端设备领域。所述控制方法应用于具有距离传感器的终端设备,包括:启动所述距离传感器,以检测接近事件;判断所述距离传感器检测到的接近事件的持续时间是否大于设定阈值;如果所述距离传感器检测到的接近事件的持续时间大于设定阈值时,将标志位在第一值和第二值间切换,其中,所述标志位存储在所述终端设备上,所述标志位用于指示开启或关闭所述终端设备的声音提醒和/或震动提醒;根据所述第一值开启所述终端设备的声音提醒和/或震动提醒;以及根据所述第二值关闭所述终端设备的声音提醒和/或震动提醒。本

终端设备的控制方法和装置.pdf
本发明实施例提供一种终端设备的控制方法和装置,属于控制技术领域。该方法包括:通过终端设备中的红外传感器检测用户的触控操作信息;根据所述触控操作信息转换得到用户控制指令,以控制所述终端设备。这种控制方式并不受触摸屏输入用户控制指令的制约,即避免了在用户戴手套或者触摸屏表面存在非导电物质等情况下,用户难以通过点击触摸屏向终端设备下达用户控制指令,或者在用户不方便触摸终端设备的触摸屏的时候,无法有效控制终端设备的局限;相对于用户通过多次点击触摸屏进行控制的方式而言,该控制方式可以减少用户点击触摸屏的次数,甚至无

一种远程控制终端设备的方法和装置.pdf
本发明公开了一种远程控制终端设备的方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:通过web应用获取用户端对终端设备的远程控制信息;根据所述远程控制信息生成所述终端设备的控制指令,并通过远程驱动代理服务将所述控制指令发送到所述终端设备;获取所述终端设备响应所述控制指令而生成的流文件,将所述流文件转换为预设格式的压缩图片;将所述预设格式的压缩图片发布到所述web应用。该实施方式能够减少远程真机屏幕响应时间,一个硬件设备可以连接多个终端设备,并可以实现远程多控,降低兼容性测试成本。