
拒止环境下的多无人机自身定位与目标定位方法.pdf

景福****90

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
拒止环境下的多无人机自身定位与目标定位方法.pdf
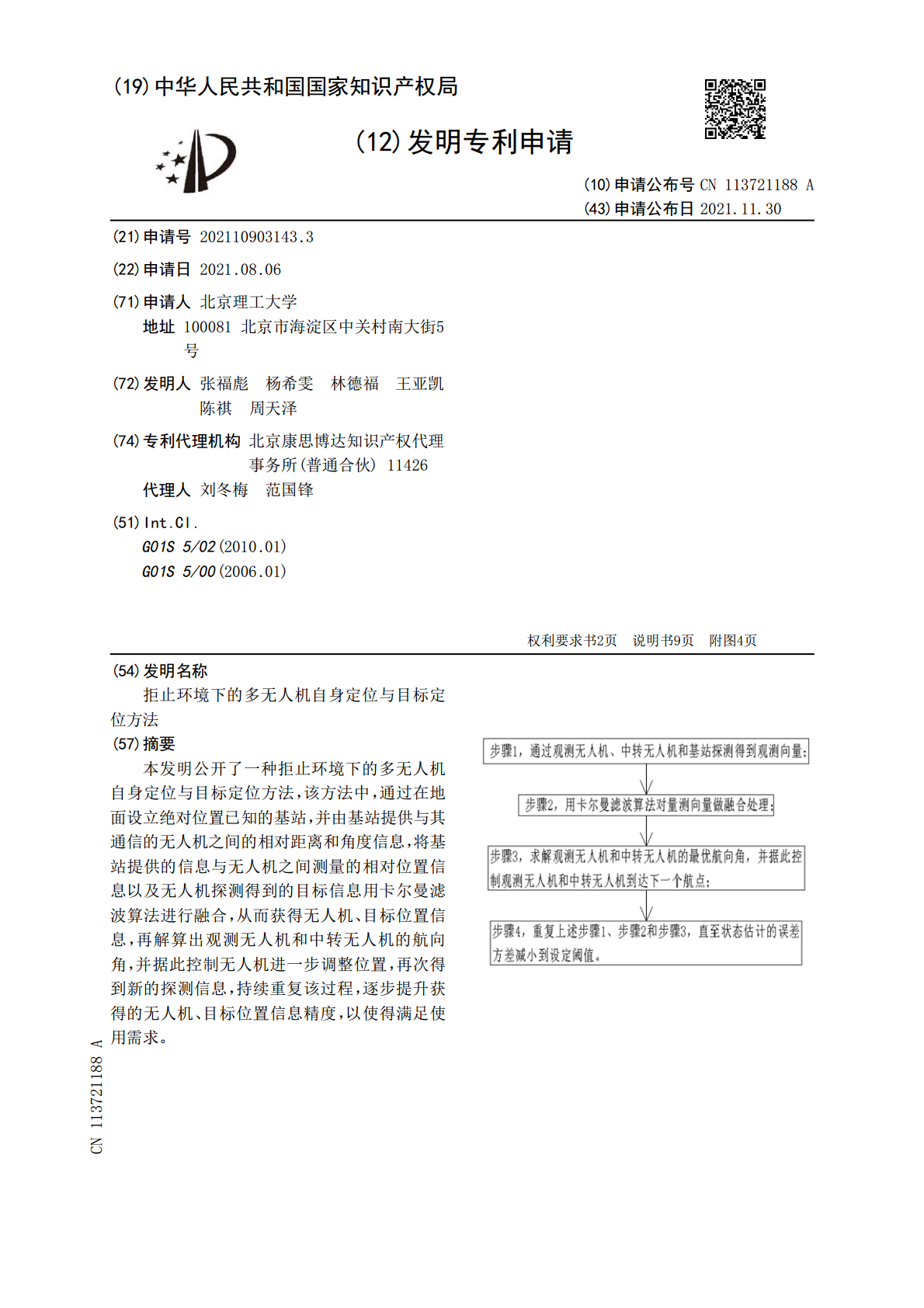
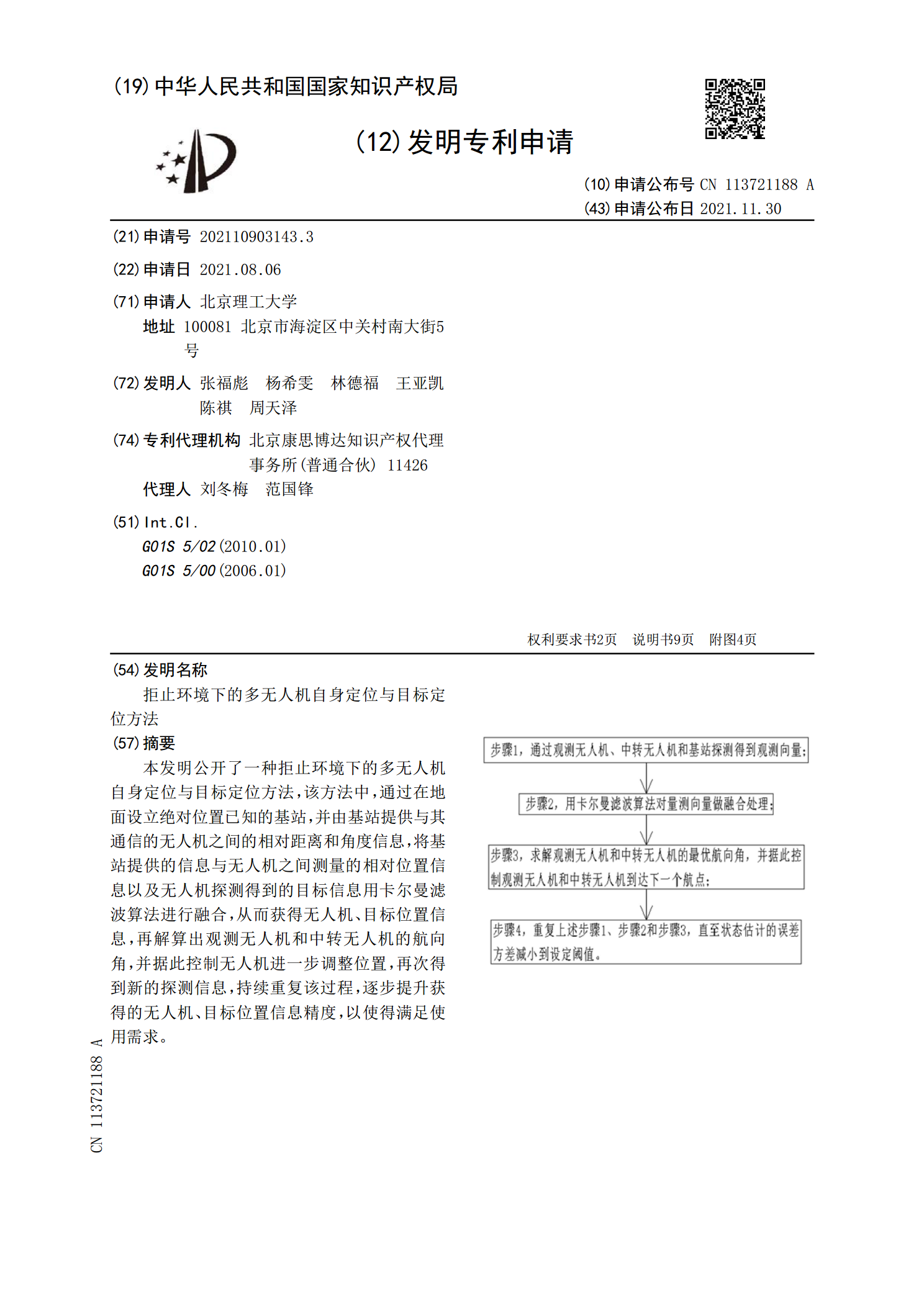
本发明公开了一种拒止环境下的多无人机自身定位与目标定位方法,该方法中,通过在地面设立绝对位置已知的基站,并由基站提供与其通信的无人机之间的相对距离和角度信息,将基站提供的信息与无人机之间测量的相对位置信息以及无人机探测得到的目标信息用卡尔曼滤波算法进行融合,从而获得无人机、目标位置信息,再解算出观测无人机和中转无人机的航向角,并据此控制无人机进一步调整位置,再次得到新的探测信息,持续重复该过程,逐步提升获得的无人机、目标位置信息精度,以使得满足使用需求。
GPS拒止环境下基于定位置信度的多无人机协同定位方法.pptx
汇报人:目录PARTONEPARTTWO无人机协同定位的背景和意义基于定位置信度的协同定位方法原理无人机协同定位的应用场景PARTTHREE定位置信度的概念和计算方法定位置信度在协同定位中的重要性基于定位置信度的协同定位算法流程PARTFOURGPS拒止环境对无人机定位的影响基于定位置信度的协同定位算法在GPS拒止环境下的适用性算法实现的关键技术问题及解决方案PARTFIVE与传统定位方法的比较算法的优势和局限性分析在实际应用中的适用性和限制条件PARTSIX算法的改进方向和未来发展趋势在军事、救援等领域

无人机在GNSS拒止环境下的UWB定位系统研究.docx
无人机在GNSS拒止环境下的UWB定位系统研究伴随着无人机技术的日益成熟,无人机的应用越来越广泛。然而,在某些情况下,GNSS信号(全球卫星定位系统)可能受到阻拦,如在城市峡谷、深山密林等场所,这些情况下使得无人机无法准确定位和导航。在这些场合,UWB(Ultra-Wideband,超宽带)技术可以替代GNSS技术,对无人机进行定位和导航。UWB技术是一种基于短脉冲和高带宽的通信技术,其通信距离通常为几百米,相比之下,GNSS技术的通信距离可达到千米级别。然而,UWB定位技术弥补了GNSS在定位精度上的不
一种基于视景定位的拒止环境下无人机航迹规划方法.pdf
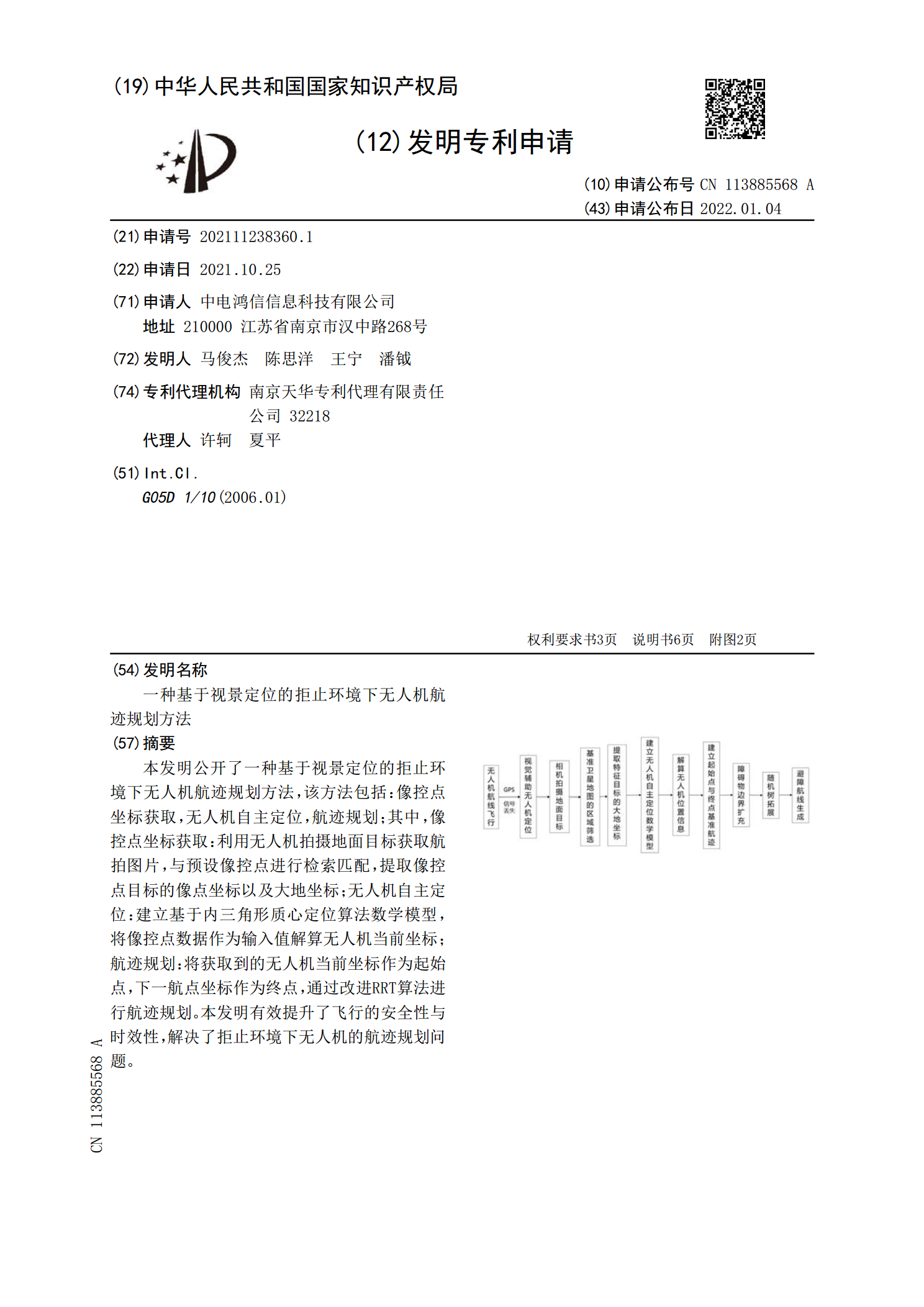
本发明公开了一种基于视景定位的拒止环境下无人机航迹规划方法,该方法包括:像控点坐标获取,无人机自主定位,航迹规划;其中,像控点坐标获取:利用无人机拍摄地面目标获取航拍图片,与预设像控点进行检索匹配,提取像控点目标的像点坐标以及大地坐标;无人机自主定位:建立基于内三角形质心定位算法数学模型,将像控点数据作为输入值解算无人机当前坐标;航迹规划:将获取到的无人机当前坐标作为起始点,下一航点坐标作为终点,通过改进RRT算法进行航迹规划。本发明有效提升了飞行的安全性与时效性,解决了拒止环境下无人机的航迹规划问题。

国外提升卫星信号在拒止环境下导航定位能力的新技术.docx
国外提升卫星信号在拒止环境下导航定位能力的新技术引言自导航定位技术形成以来,GPS定位一直是最广泛应用的一种,它是利用卫星信号的一种全球性的定位方式。然而,在一些场景中(例如城市峡谷和密林区),由于信号受到阻挡,导致GPS定位精度下降或者完全无法使用。因此,寻找新的技术来提高在这种环境下导航定位的能力成为当前的热门研究方向。本文将介绍当前国外提升卫星信号在拒止环境下导航定位能力的新技术。卫星信号补偿技术卫星信号补偿技术是一种现有的技术,它可以有效提高在拒止环境下导航定位的精度。该技术基于GPS、伽利略等卫