
一种多波段多雷达协作探测方法.pdf

朋兴****en

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多波段多雷达协作探测方法.pdf
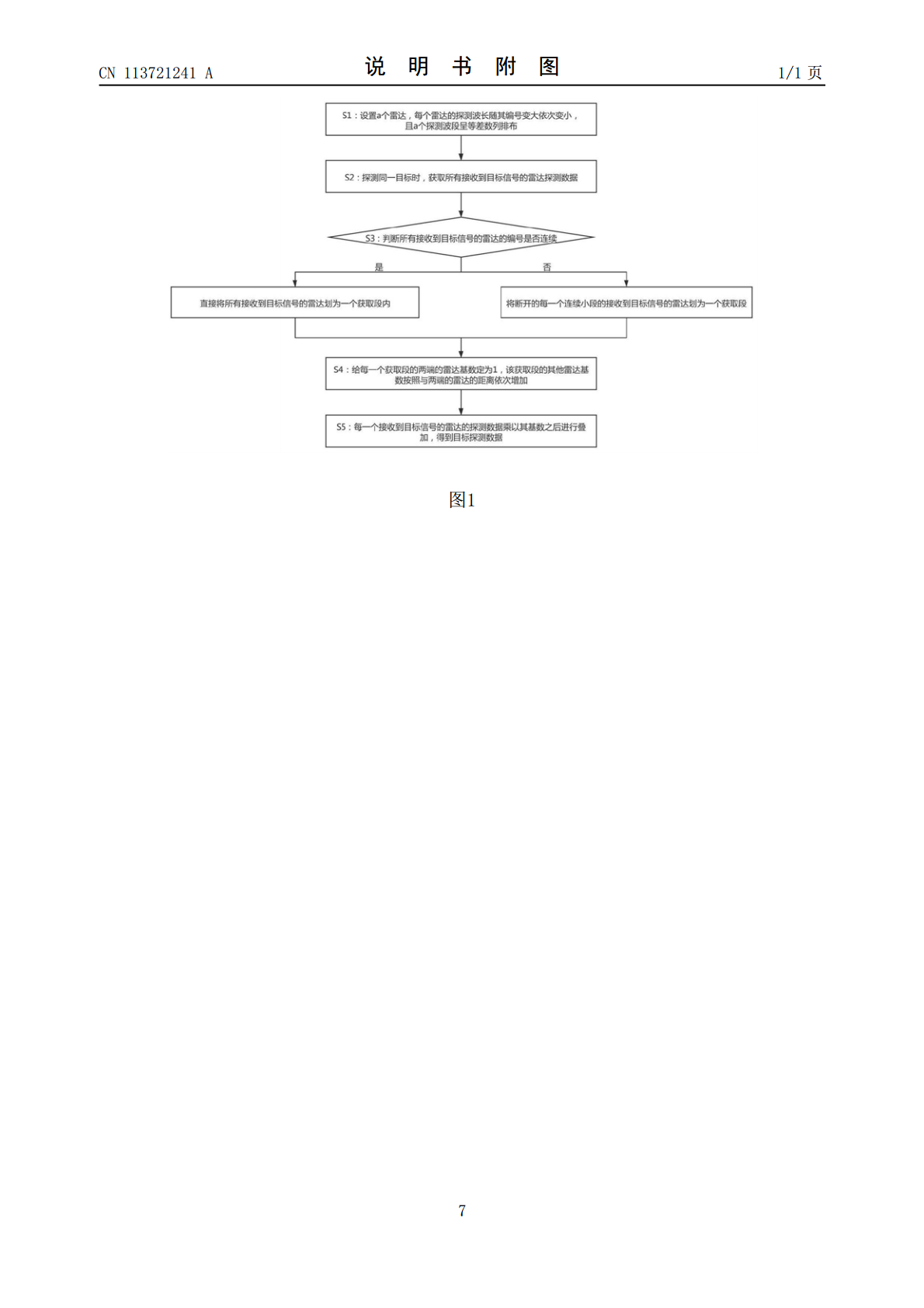
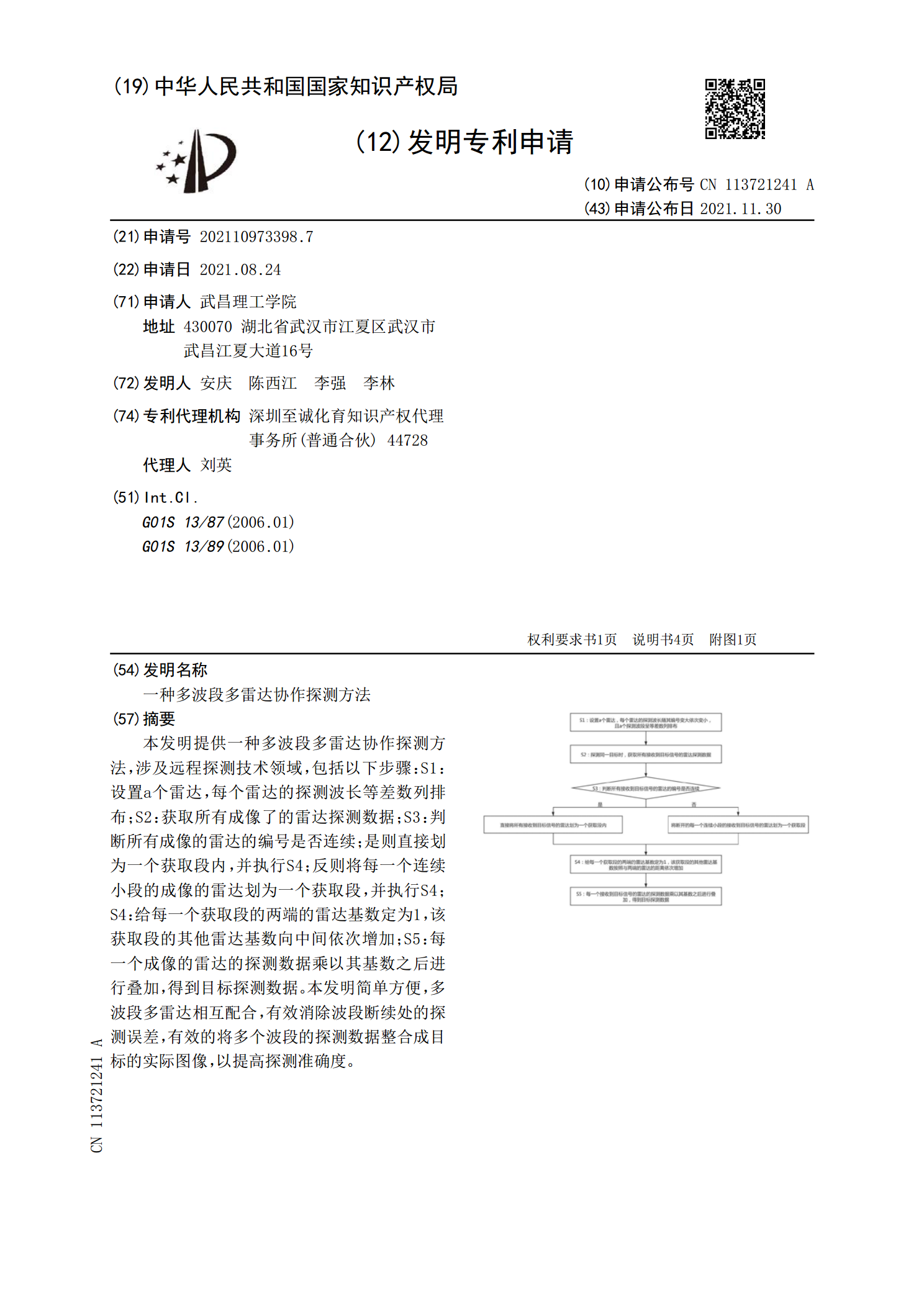
本发明提供一种多波段多雷达协作探测方法,涉及远程探测技术领域,包括以下步骤:S1:设置a个雷达,每个雷达的探测波长等差数列排布;S2:获取所有成像了的雷达探测数据;S3:判断所有成像的雷达的编号是否连续;是则直接划为一个获取段内,并执行S4;反则将每一个连续小段的成像的雷达划为一个获取段,并执行S4;S4:给每一个获取段的两端的雷达基数定为1,该获取段的其他雷达基数向中间依次增加;S5:每一个成像的雷达的探测数据乘以其基数之后进行叠加,得到目标探测数据。本发明简单方便,多波段多雷达相互配合,有效消除波段断
多波段机载雷达天线.pdf
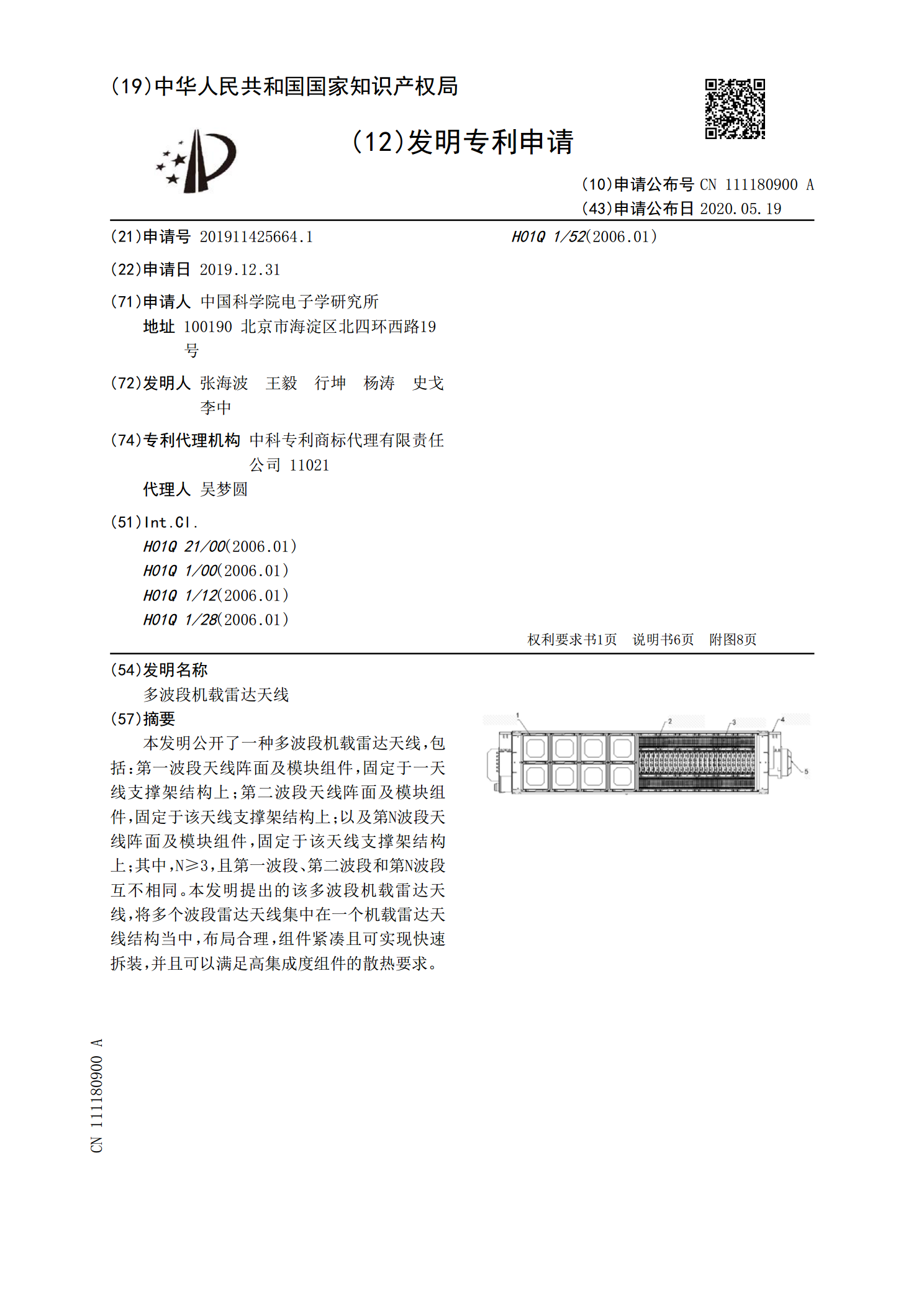
本发明公开了一种多波段机载雷达天线,包括:第一波段天线阵面及模块组件,固定于一天线支撑架结构上;第二波段天线阵面及模块组件,固定于该天线支撑架结构上;以及第N波段天线阵面及模块组件,固定于该天线支撑架结构上;其中,N≥3,且第一波段、第二波段和第N波段互不相同。本发明提出的该多波段机载雷达天线,将多个波段雷达天线集中在一个机载雷达天线结构当中,布局合理,组件紧凑且可实现快速拆装,并且可以满足高集成度组件的散热要求。
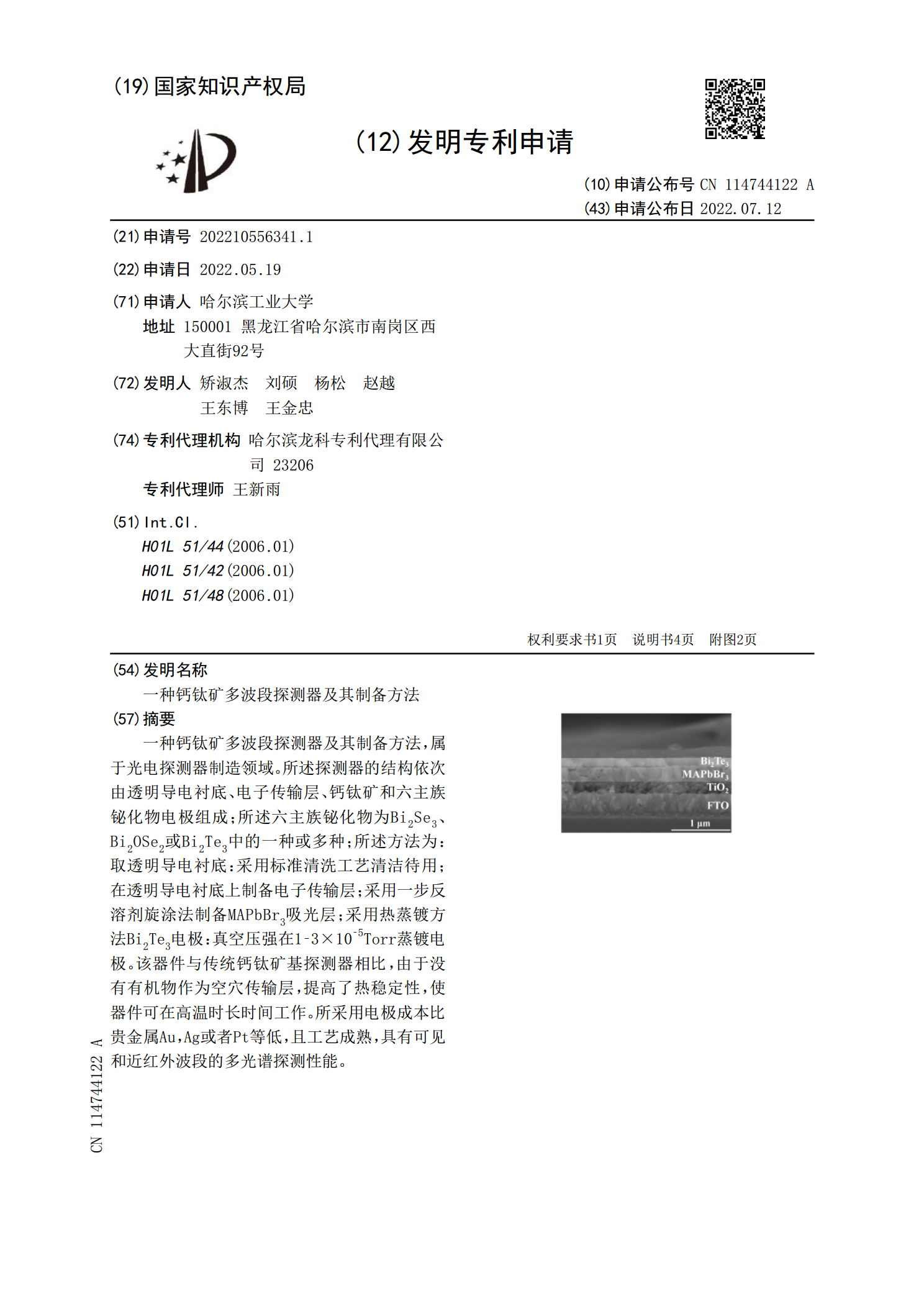
一种钙钛矿多波段探测器及其制备方法.pdf
一种钙钛矿多波段探测器及其制备方法,属于光电探测器制造领域。所述探测器的结构依次由透明导电衬底、电子传输层、钙钛矿和六主族铋化物电极组成;所述六主族铋化物为Bi<base:Sub>2</base:Sub>Se<base:Sub>3</base:Sub>、Bi<base:Sub>2</base:Sub>OSe<base:Sub>2</base:Sub>或Bi<base:Sub>2</base:Sub>Te<base:Sub>3</base:Sub>中的一种或多种;所述方法为:取透明导电衬底:采用标准清洗工艺

微波光子双波段雷达探测方法及微波光子双波段雷达.pdf
本发明公开了一种微波光子双波段雷达探测方法,用两个不同的中频线性调频信号对光载波进行保留正负二阶边带的偏振复用调制,在所得到的调制光信号的两个正交偏振态上分别生成只保留正负二阶边带的光载线性调频信号;将所述调制光信号转换为电信号后,将其中所含两个波段的四倍频线性调频信号分离开,分别作为雷达探测信号向目标发射;同时,将目标反射的两个波段电信号合为一路后,以所述调制光信号作为参考光信号,对合路后电信号进行光域的变频和去斜处理,得到两个分别携带目标信息的中频信号,并从中提取出目标信息。本发明还公开了一种微波光子
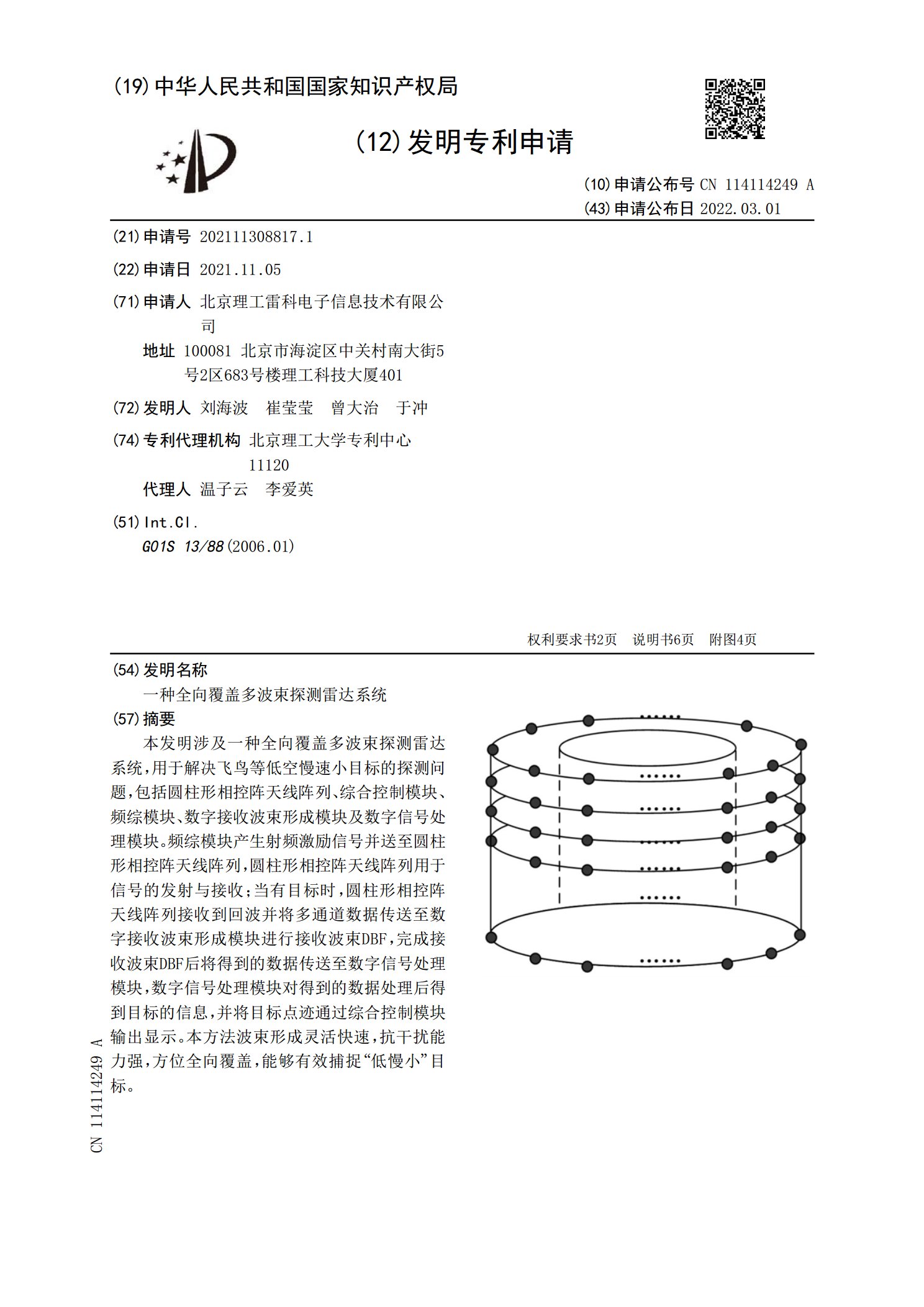
一种全向覆盖多波束探测雷达系统.pdf
本发明涉及一种全向覆盖多波束探测雷达系统,用于解决飞鸟等低空慢速小目标的探测问题,包括圆柱形相控阵天线阵列、综合控制模块、频综模块、数字接收波束形成模块及数字信号处理模块。频综模块产生射频激励信号并送至圆柱形相控阵天线阵列,圆柱形相控阵天线阵列用于信号的发射与接收;当有目标时,圆柱形相控阵天线阵列接收到回波并将多通道数据传送至数字接收波束形成模块进行接收波束DBF,完成接收波束DBF后将得到的数据传送至数字信号处理模块,数字信号处理模块对得到的数据处理后得到目标的信息,并将目标点迹通过综合控制模块输出显示