
车路协同信息处理方法、装置、电子设备以及存储介质.pdf

光誉****君哥

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车路协同信息处理方法、装置、电子设备以及存储介质.pdf
本公开提供了一种车路协同信息处理方法、装置、电子设备以及存储介质,其中,该方法包括:获取车载终端设备传输的路端感知数据,和安装有车载终端设备的目标车辆根据采集到的周边环境信息确定的环境感知数据;将路端感知数据和环境感知数据进行融合,得到融合结果;根据融合结果控制目标车辆的驾驶状态。本公开实施例通过获取路端感知数据,并将该路端感知数据和环境感知数据融合,得到融合结果的方式,提升了目标车辆在自动驾驶过程中的安全性和反应能力,消除了自动驾驶车辆的安全隐患,并提高了自动驾驶车辆的控制精度,进一步保证了驾驶者的安全
信息处理方法、装置、电子设备以及存储介质.pdf
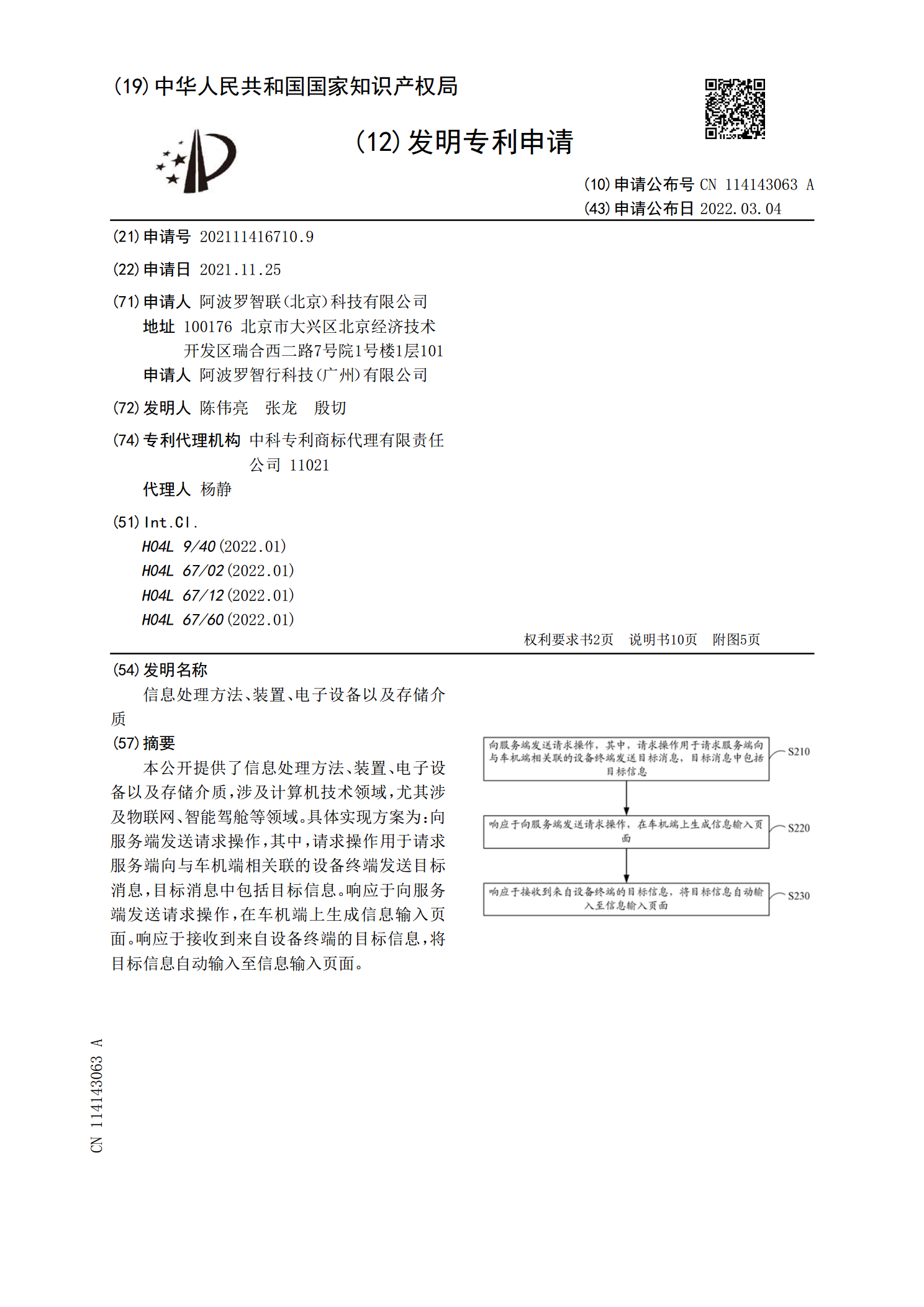
本公开提供了信息处理方法、装置、电子设备以及存储介质,涉及计算机技术领域,尤其涉及物联网、智能驾舱等领域。具体实现方案为:向服务端发送请求操作,其中,请求操作用于请求服务端向与车机端相关联的设备终端发送目标消息,目标消息中包括目标信息。响应于向服务端发送请求操作,在车机端上生成信息输入页面。响应于接收到来自设备终端的目标信息,将目标信息自动输入至信息输入页面。

信息处理方法、装置、电子设备以及存储介质.pdf
本公开公开了信息处理方法、装置、电子设备、存储介质以及程序产品,涉及计算机技术领域,尤其涉及软件开发技术领域。具体实现方案为:响应于针对显示的待处理信息的触发操作,从待处理信息中识别与触发操作相关联的操作对象;以及确定与操作对象相匹配的目标工具栏,其中,目标工具栏包括多个功能键,多个功能键中的至少一个功能键是基于触发操作的操作对象确定的。
游戏的信息处理方法、装置、存储介质以及电子设备.pdf
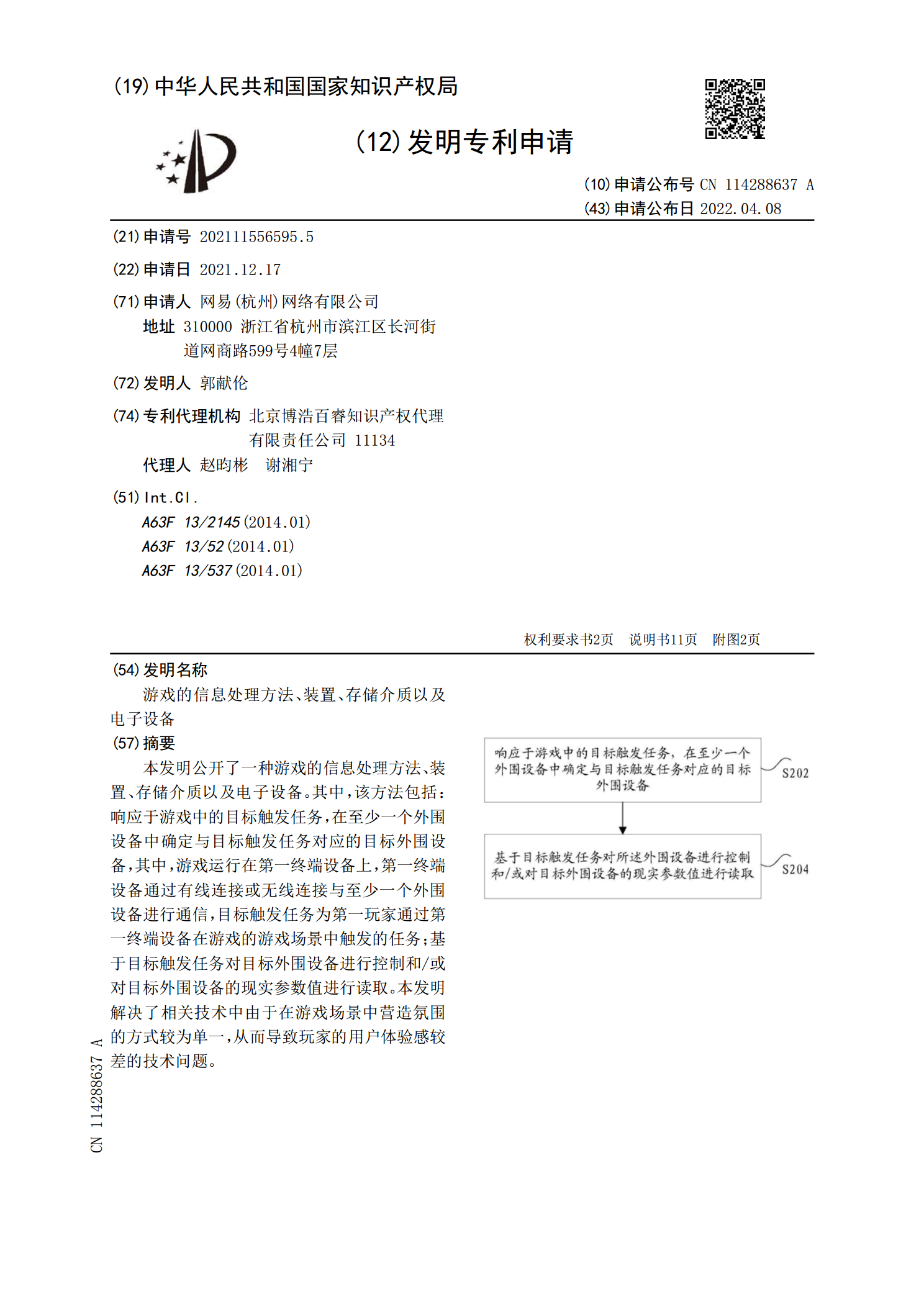
本发明公开了一种游戏的信息处理方法、装置、存储介质以及电子设备。其中,该方法包括:响应于游戏中的目标触发任务,在至少一个外围设备中确定与目标触发任务对应的目标外围设备,其中,游戏运行在第一终端设备上,第一终端设备通过有线连接或无线连接与至少一个外围设备进行通信,目标触发任务为第一玩家通过第一终端设备在游戏的游戏场景中触发的任务;基于目标触发任务对目标外围设备进行控制和/或对目标外围设备的现实参数值进行读取。本发明解决了相关技术中由于在游戏场景中营造氛围的方式较为单一,从而导致玩家的用户体验感较差的技术问题
信息处理方法、生成方法、装置、电子设备以及存储介质.pdf
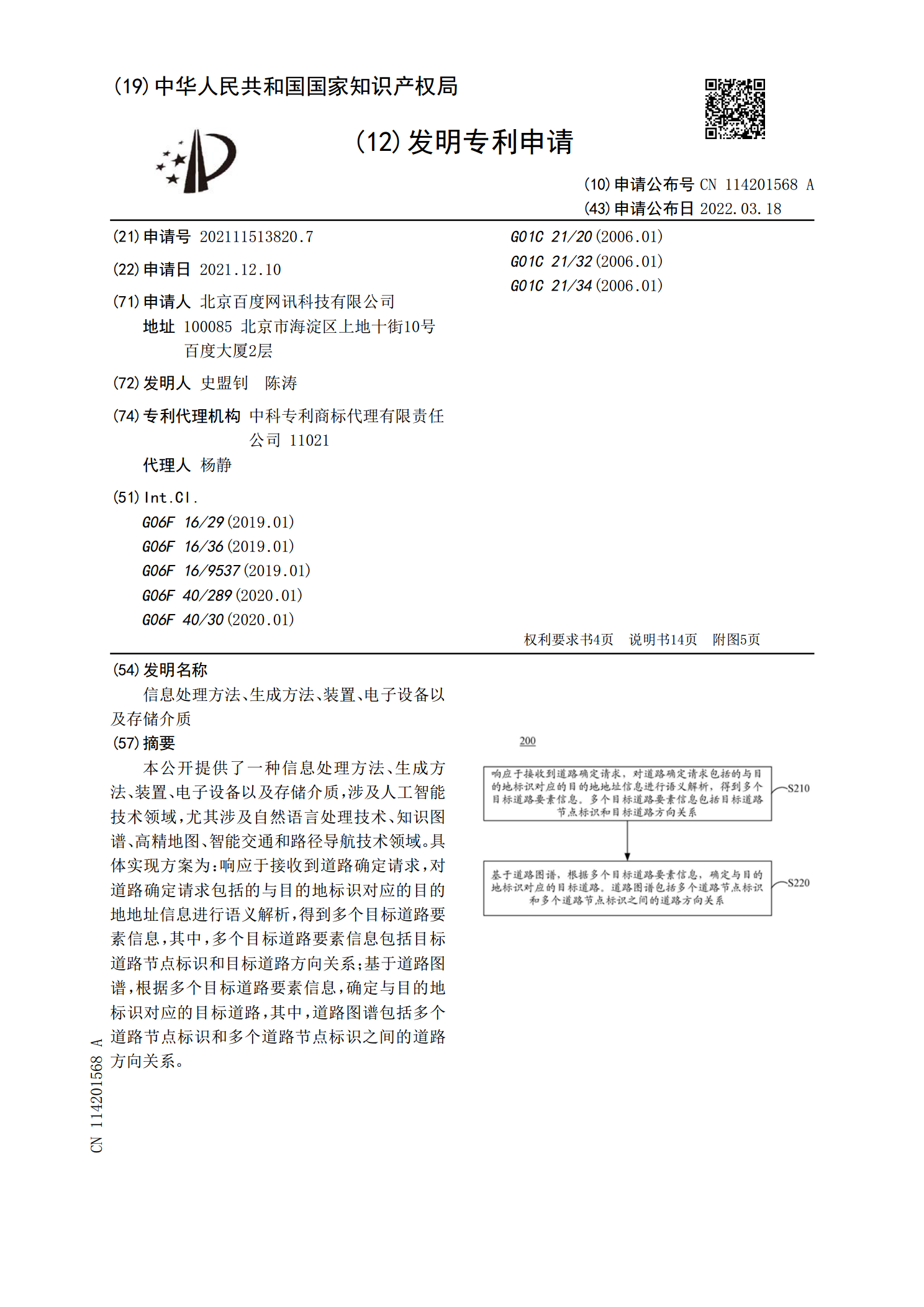
本公开提供了一种信息处理方法、生成方法、装置、电子设备以及存储介质,涉及人工智能技术领域,尤其涉及自然语言处理技术、知识图谱、高精地图、智能交通和路径导航技术领域。具体实现方案为:响应于接收到道路确定请求,对道路确定请求包括的与目的地标识对应的目的地地址信息进行语义解析,得到多个目标道路要素信息,其中,多个目标道路要素信息包括目标道路节点标识和目标道路方向关系;基于道路图谱,根据多个目标道路要素信息,确定与目的地标识对应的目标道路,其中,道路图谱包括多个道路节点标识和多个道路节点标识之间的道路方向关系。