
一种清扫车智能风向控制系统.pdf

曦晨****22

1/8
2/8
3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种清扫车智能风向控制系统.pdf
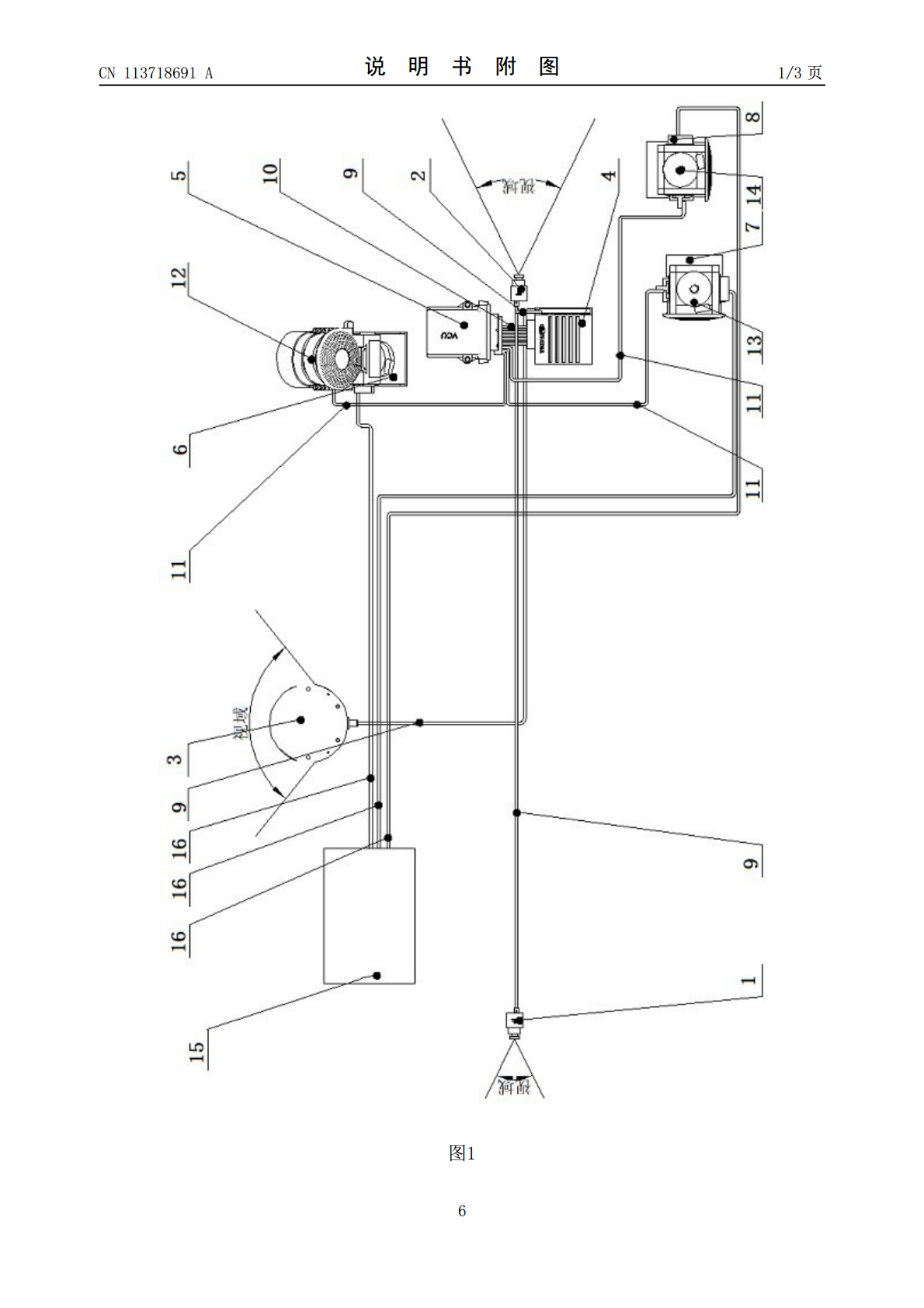
本发明提供一种清扫车智能风向控制系统,包括后置广角摄像头、前置广角摄像头、侧方双目摄像头、图像处理与计算模块、整车控制器、左线控云台、右线控云台和右前线控云台,后置广角摄像头、前置广角摄像头、侧方双目摄像头分别通过GPU信号线与图像处理与计算模块连接,图像处理与计算模块与整车控制器通过数据传输线进行连接,左线控云台、右线控云台和右前线控云台分别通过线控云台信号线与整车控制器连接。通过线控实现,无需人工调节;可搭载无人智能化设备,应用场景广泛;具有极强的前瞻性。搭载清冲环卫车作业:风向可以随地面垃圾的分布、
一种清扫车吸嘴装置智能调节系统及清扫车.pdf
本申请实施例公开了一种清扫车吸嘴装置智能调节系统及清扫车。该系统包括AI图像识别装置、测距装置和高度调节装置。其中,AI图像识别装置与清扫车的上装控制器相连接;测距装置安装于清扫车的吸嘴装置上并与清扫车的上装控制器相连接;高度调节装置安装于清扫车的吸嘴装置上并与清扫车的上装控制器相连接。本申请的清扫车吸嘴装置智能调节系统通过在车辆上搭载AI图像识别装置用于识别垃圾,将采集到的垃圾特征信息传递给上装控制器,上装控制器发出信号来调节高度调节装置,从而实现吸嘴的高度调节。结合AI图像识别装置采集的垃圾特征参数,
一种智能清扫车的主扫装置.pdf
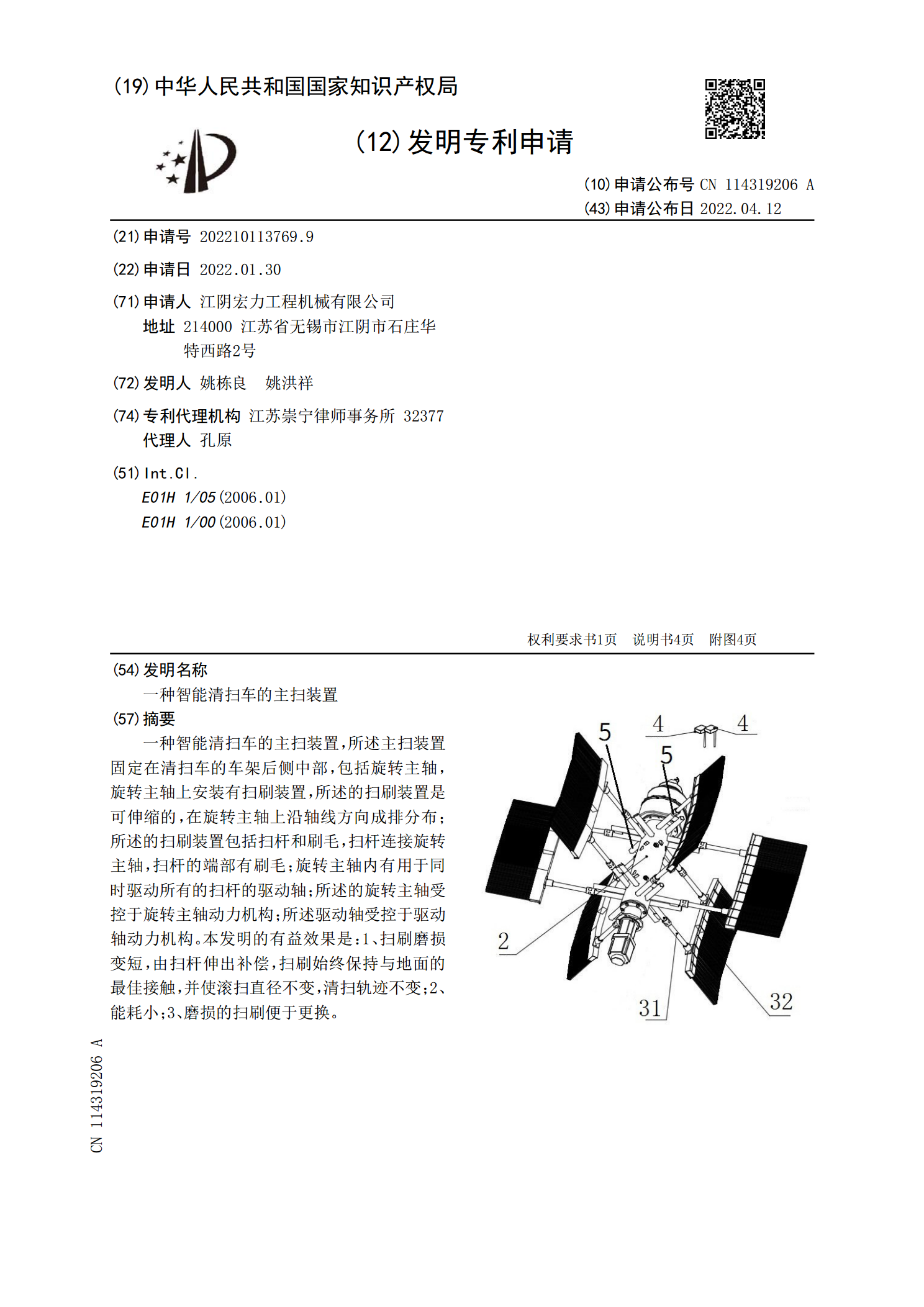
一种智能清扫车的主扫装置,所述主扫装置固定在清扫车的车架后侧中部,包括旋转主轴,旋转主轴上安装有扫刷,所述的扫刷是可伸缩的,在旋转主轴上沿轴线方向成排分布;所述的扫刷包括扫杆和刷毛,扫杆连接旋转主轴,扫杆的端部有刷毛;旋转主轴内有用于同时驱动所有的扫杆的驱动轴;所述的旋转主轴受控于旋转主轴动力机构;所述驱动轴受控于驱动轴动力机构。本发明的有益效果是:1、刷毛磨损变短,由扫杆伸出补偿,扫刷始终保持与地面的最佳接触,并使滚扫直径不变,清扫轨迹不变;2、能耗小;3、磨损的扫刷便于更换。

一种风力发电风向识别控制系统.pdf
本发明公开了一种风力发电风向识别控制系统,包括在场地上安装的风速传感器,在安装有发电机及传动系统的机箱与塔之间安装有电动转向盘,所述电动转向盘上设有角度传感器,所述风速传感器、角度传感器和电动转向盘通过控制电路分别与中央处理器相连,所述中央处理器通过通信模块与监控中心相连。本发明根据最大风力的方向对风轮进行自动转向,通过控制中心对所有的风塔的风轮进行统一的调整方向和控制,最大限度的利用了风能。本发明结构简单,易于制造,且制造成本低。
一种智能机器人马路垃圾清扫车.pdf
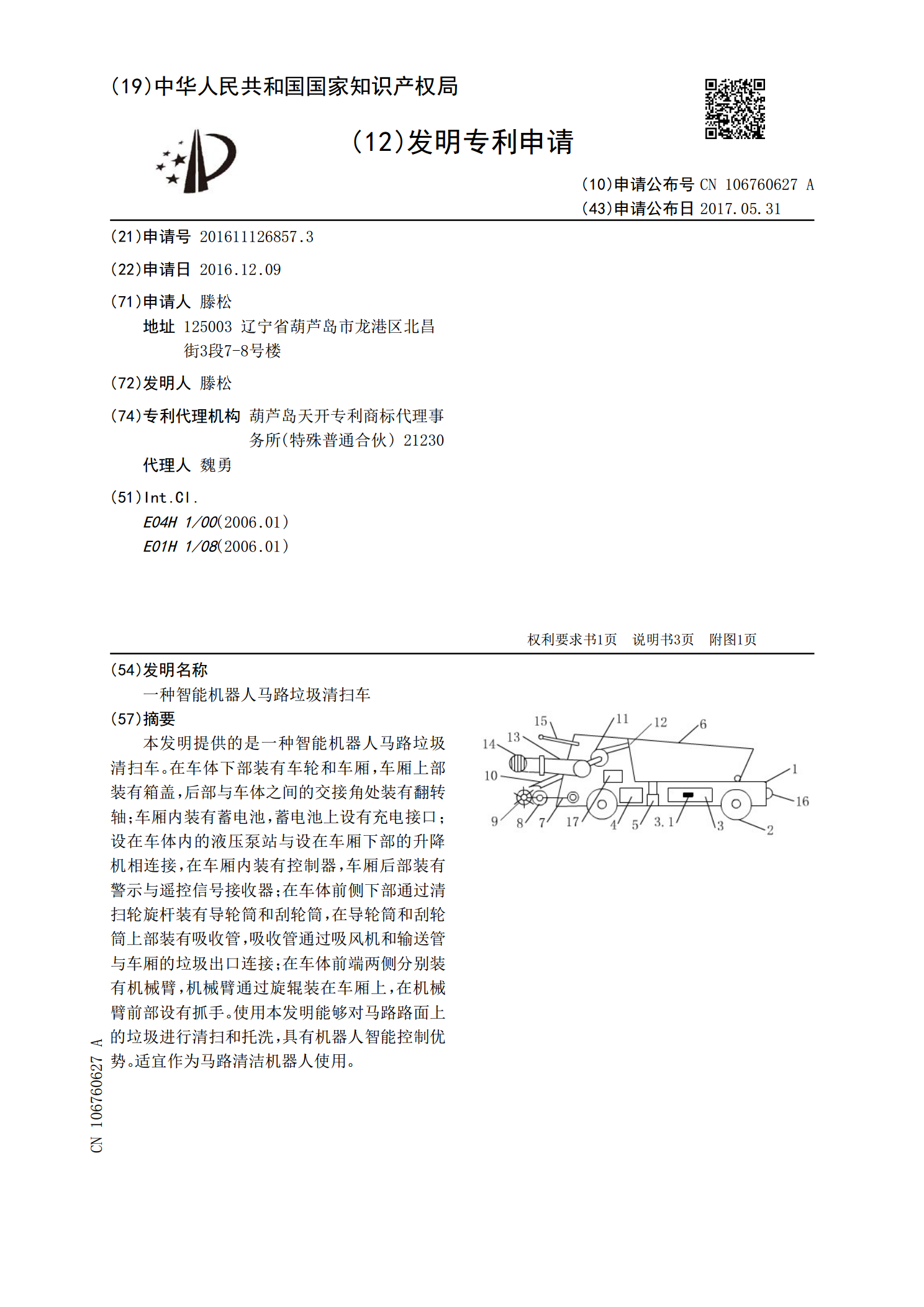
本发明提供的是一种智能机器人马路垃圾清扫车。在车体下部装有车轮和车厢,车厢上部装有箱盖,后部与车体之间的交接角处装有翻转轴;车厢内装有蓄电池,蓄电池上设有充电接口;设在车体内的液压泵站与设在车厢下部的升降机相连接,在车厢内装有控制器,车厢后部装有警示与遥控信号接收器;在车体前侧下部通过清扫轮旋杆装有导轮筒和刮轮筒,在导轮筒和刮轮筒上部装有吸收管,吸收管通过吸风机和输送管与车厢的垃圾出口连接;在车体前端两侧分别装有机械臂,机械臂通过旋辊装在车厢上,在机械臂前部设有抓手。使用本发明能够对马路路面上的垃圾进行清