
基于目标移动轨迹预测的深度学习集成的跟踪算法.pdf

志信****pp


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于目标移动轨迹预测的深度学习集成的跟踪算法.pdf
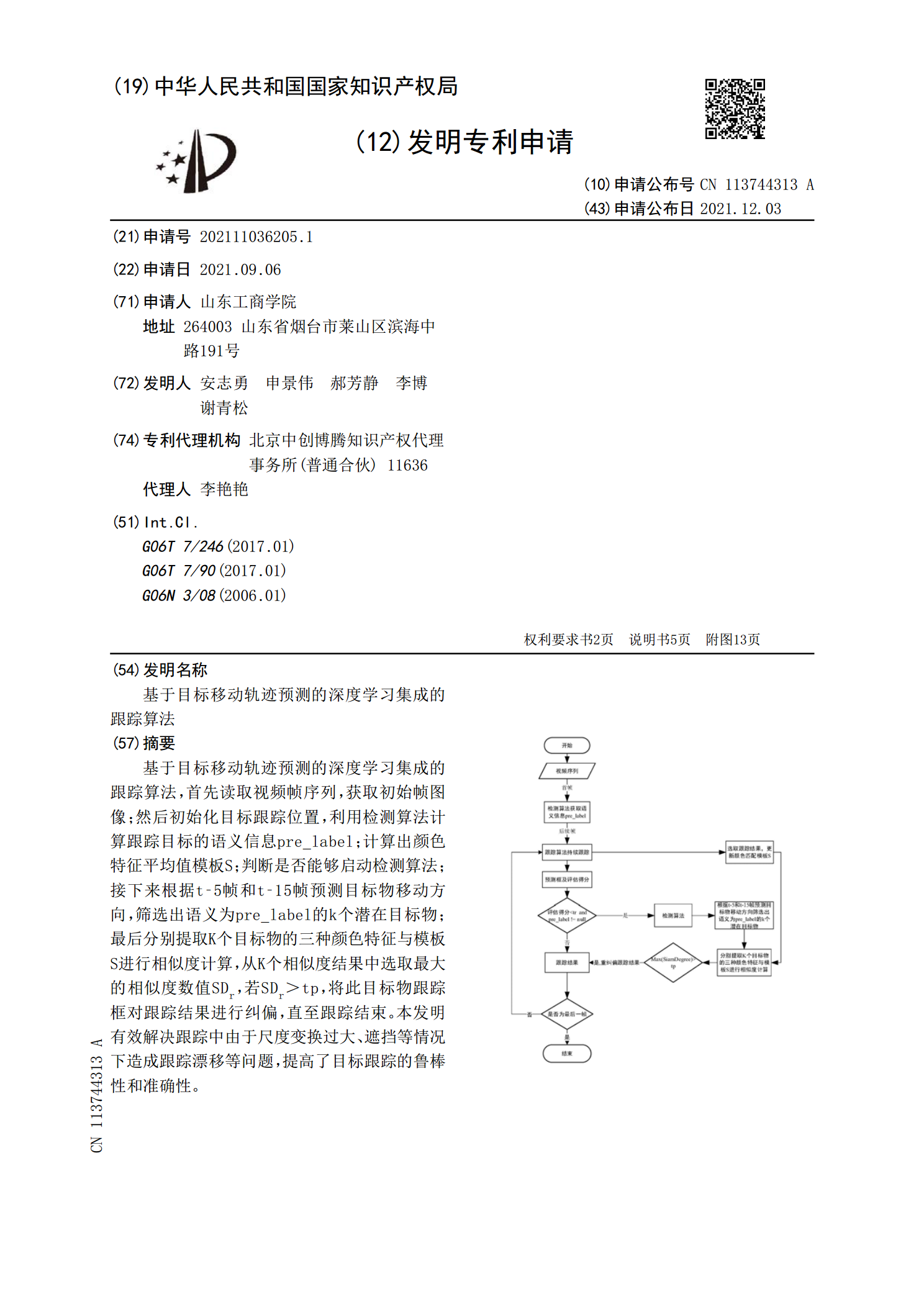
基于目标移动轨迹预测的深度学习集成的跟踪算法,首先读取视频帧序列,获取初始帧图像;然后初始化目标跟踪位置,利用检测算法计算跟踪目标的语义信息pre_label;计算出颜色特征平均值模板S;判断是否能够启动检测算法;接下来根据t‑5帧和t‑15帧预测目标物移动方向,筛选出语义为pre_label的k个潜在目标物;最后分别提取K个目标物的三种颜色特征与模板S进行相似度计算,从K个相似度结果中选取最大的相似度数值SD

基于深度学习的目标跟踪算法研究.docx
基于深度学习的目标跟踪算法研究基于深度学习的目标跟踪算法研究摘要:随着深度学习的迅猛发展,目标跟踪算法在计算机视觉领域中得到了广泛的应用。本论文主要研究基于深度学习的目标跟踪算法,综述了目标跟踪的基本概念和常用的深度学习方法,并分析了其存在的问题和挑战。在此基础上,从数据集构建、模型设计和调优等方面探讨了目标跟踪算法的改进方向,并展望了未来的研究方向。1.引言目标跟踪是计算机视觉领域中重要的研究方向之一,广泛应用于视频监控、智能交通、自动驾驶等领域。其主要目标是在给定的视频序列中找到并跟踪特定的目标。随着

基于轨迹表征与深度学习的移动目标行为模式分析.docx
基于轨迹表征与深度学习的移动目标行为模式分析基于轨迹表征与深度学习的移动目标行为模式分析摘要:移动目标行为分析是计算机视觉和智能交通领域的重要研究方向之一。本文针对传统方法在轨迹表征和行为模式分析上的局限性,提出了一种基于轨迹表征与深度学习相结合的方法。首先,对移动目标的轨迹数据进行预处理、特征提取和轨迹表征;其次,采用深度学习模型对轨迹数据进行建模和训练;最后,利用训练好的模型对移动目标的行为模式进行分析和预测。实验结果表明,该方法在行为模式分类和预测任务上具有较高的准确性和可靠性。1.引言移动目标行为

基于深度学习的目标视频跟踪算法综述.docx
基于深度学习的目标视频跟踪算法综述动态目标跟踪是计算机视觉领域的关键问题之一,涉及在给定视频序列中准确地跟踪运动目标的能力。目标跟踪算法的发展对於自动驾驶、监控、安全、智能交通和视觉跟随等应用具有显着的意义。在过去的几十年中,计算机视觉和机器学习领域取得了巨大的进展,尤其是随着深度学习的发展,目标跟踪算法的准确性和鲁棒性得到了显著提高。本文将对基于深度学习的目标视频跟踪算法进行综述。首先,我们介绍了典型的目标跟踪框架,通常包括两个部分:对目标区域进行建模和目标区域的跟踪。这些框架主要可以分为两类,即基于模
基于深度学习的单目标跟踪算法综述.pptx
汇报人:/目录0102跟踪算法的定义和重要性传统跟踪算法的局限性深度学习在单目标跟踪领域的应用03特征提取网络目标表示方法运动模型和预测数据集和评估指标04基于滤波器的算法基于检测的算法基于生成对抗网络的算法基于Transformer的算法05评估指标和数据集算法性能比较和分析算法优缺点和改进方向06应用场景面临的挑战和解决方法未来发展方向和前景07深度学习在单目标跟踪领域的贡献和影响对未来研究的建议和展望汇报人: