
图像校正方法、装置、电子设备及计算机可读存储介质.pdf

宛菡****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像校正方法、装置、电子设备及计算机可读存储介质.pdf
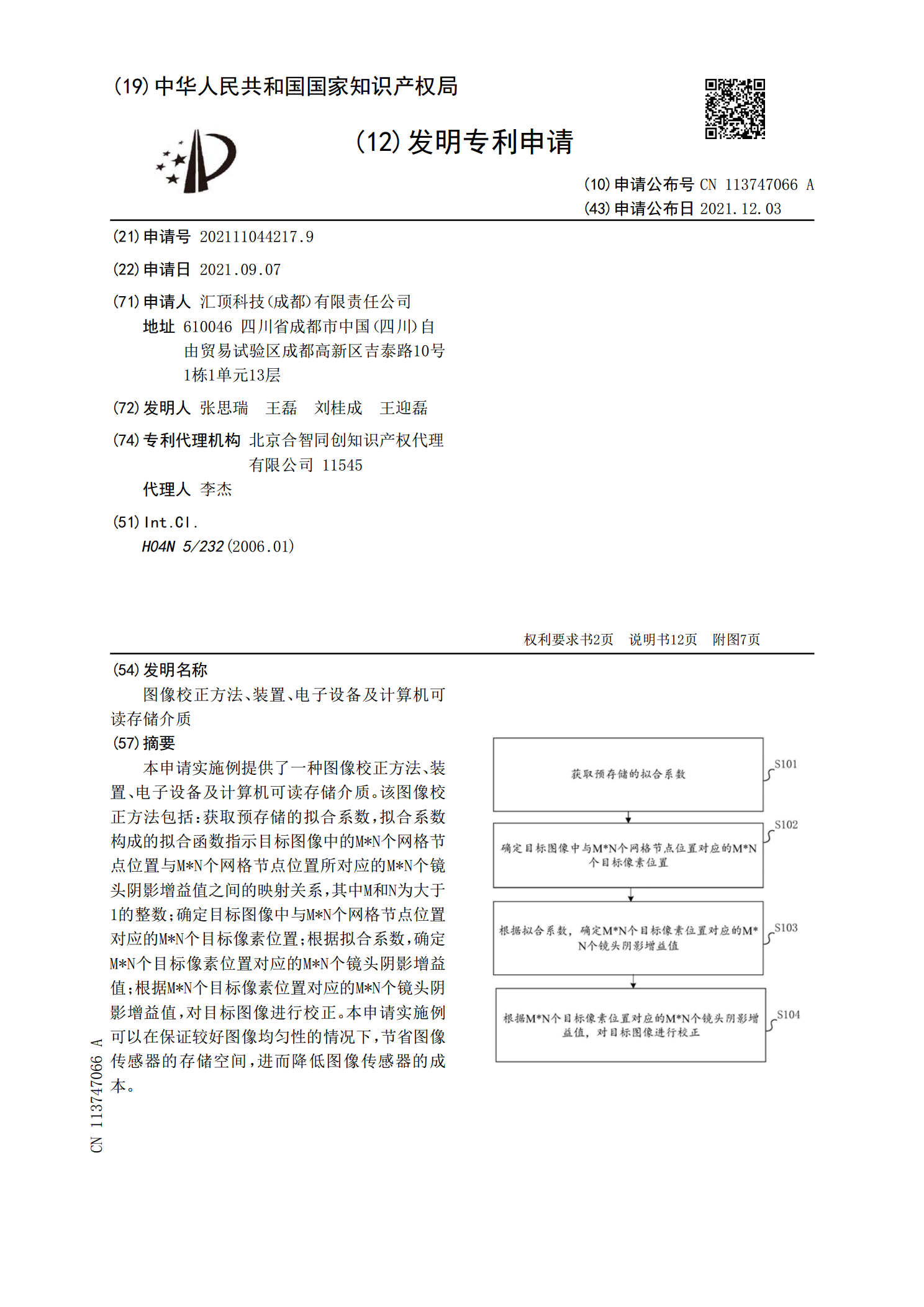
本申请实施例提供了一种图像校正方法、装置、电子设备及计算机可读存储介质。该图像校正方法包括:获取预存储的拟合系数,拟合系数构成的拟合函数指示目标图像中的M*N个网格节点位置与M*N个网格节点位置所对应的M*N个镜头阴影增益值之间的映射关系,其中M和N为大于1的整数;确定目标图像中与M*N个网格节点位置对应的M*N个目标像素位置;根据拟合系数,确定M*N个目标像素位置对应的M*N个镜头阴影增益值;根据M*N个目标像素位置对应的M*N个镜头阴影增益值,对目标图像进行校正。本申请实施例可以在保证较好图像均匀性的
图像校正方法及装置、计算机存储介质、电子设备.pdf
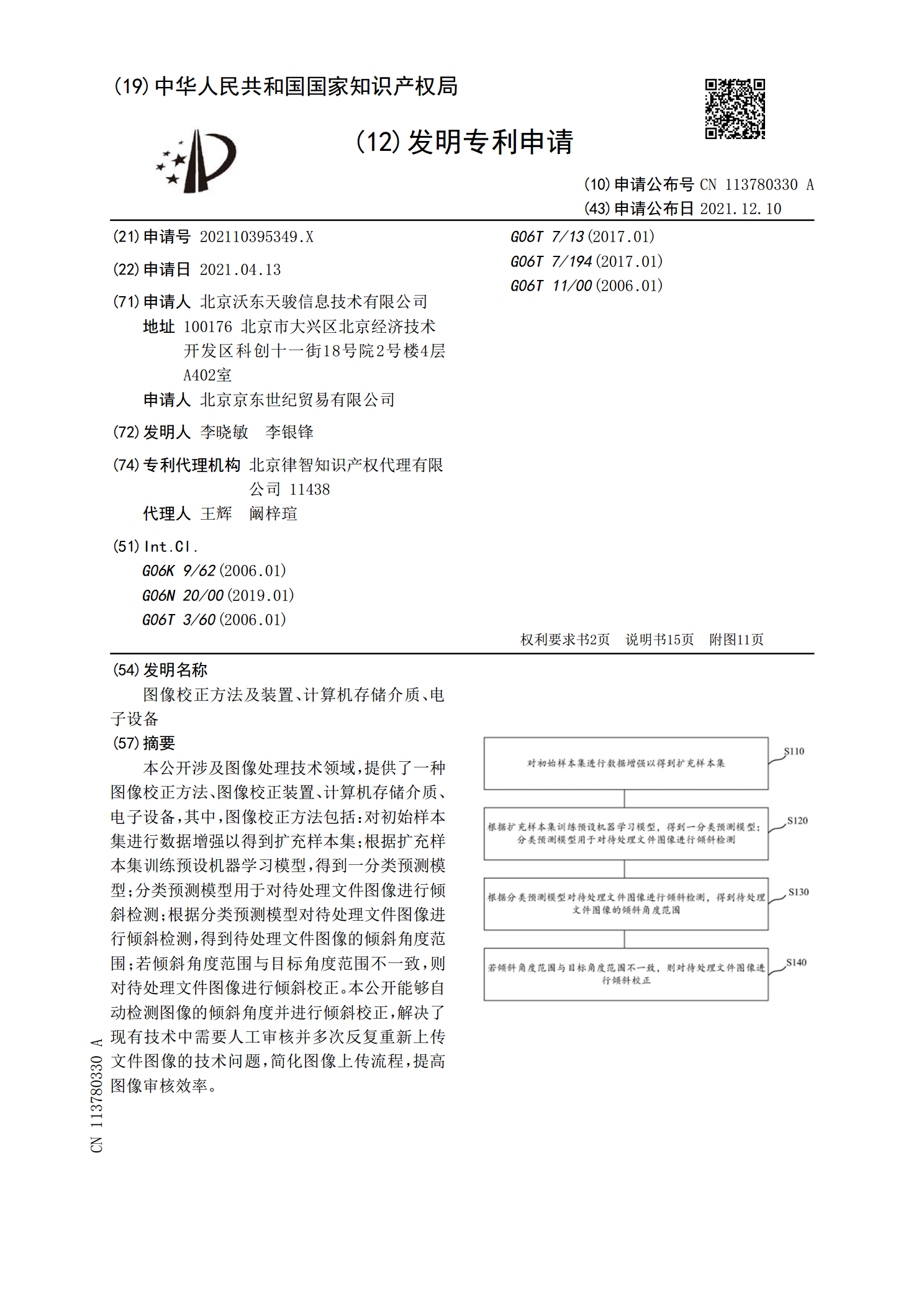
本公开涉及图像处理技术领域,提供了一种图像校正方法、图像校正装置、计算机存储介质、电子设备,其中,图像校正方法包括:对初始样本集进行数据增强以得到扩充样本集;根据扩充样本集训练预设机器学习模型,得到一分类预测模型;分类预测模型用于对待处理文件图像进行倾斜检测;根据分类预测模型对待处理文件图像进行倾斜检测,得到待处理文件图像的倾斜角度范围;若倾斜角度范围与目标角度范围不一致,则对待处理文件图像进行倾斜校正。本公开能够自动检测图像的倾斜角度并进行倾斜校正,解决了现有技术中需要人工审核并多次反复重新上传文件图像

图像校正方法、装置、电子设备和计算机可读介质.pdf
本申请实施例公开了图像校正方法、装置、电子设备和计算机可读介质。该方法的实施例包括:基于待校正图像的人脸区域和背景区域,采用不同类型的预设网格建立待校正图像对应的网格图像;确定人脸区域和背景区域的权重,并基于权重确定网格图像中的各网格点的目标位置;基于目标位置对待校正图像进行校正,得到校正图像。该实施方式提升了待校正图像的校正效果。
图像显示方法、装置、电子设备及计算机可读存储介质.pdf
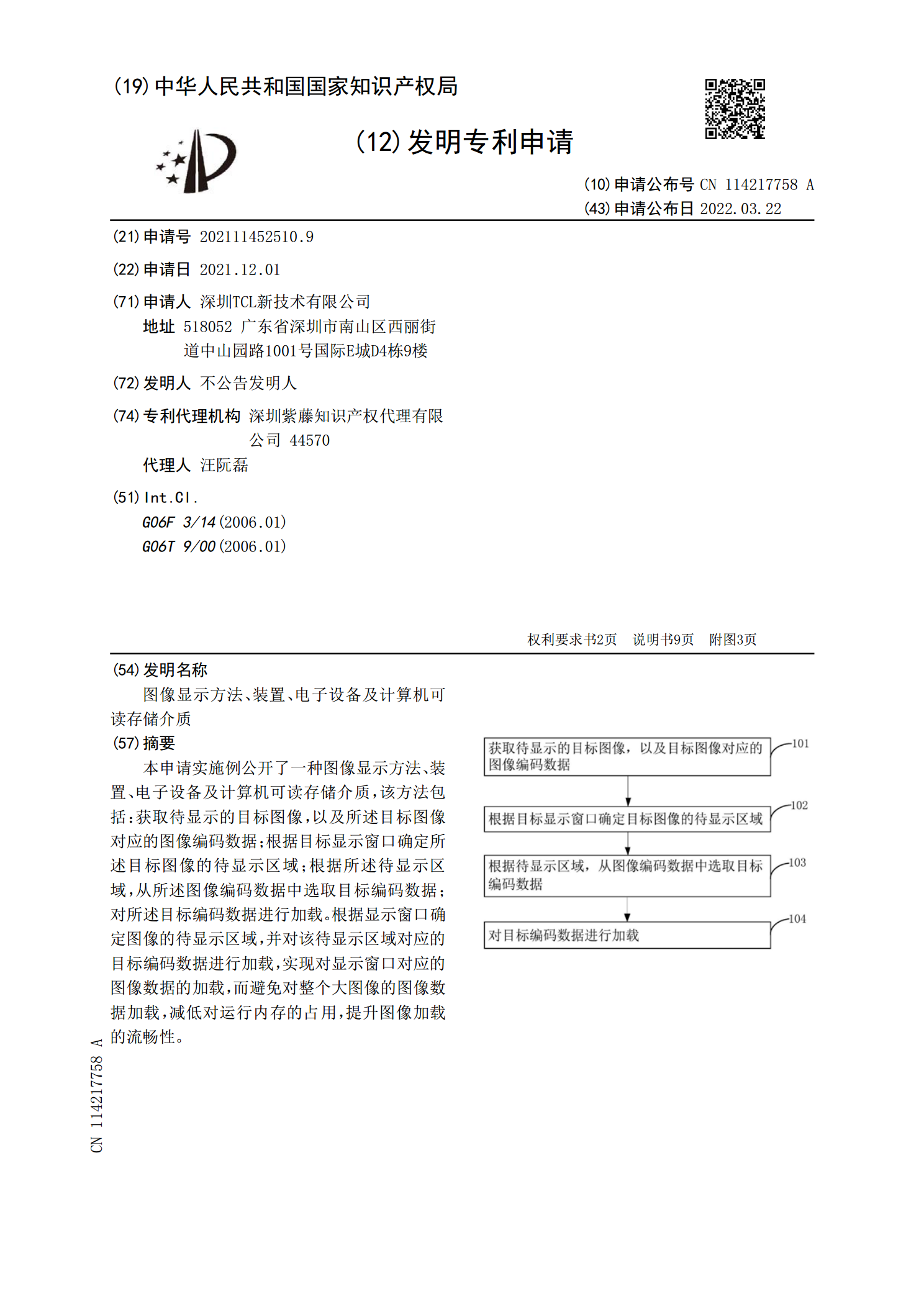
本申请实施例公开了一种图像显示方法、装置、电子设备及计算机可读存储介质,该方法包括:获取待显示的目标图像,以及所述目标图像对应的图像编码数据;根据目标显示窗口确定所述目标图像的待显示区域;根据所述待显示区域,从所述图像编码数据中选取目标编码数据;对所述目标编码数据进行加载。根据显示窗口确定图像的待显示区域,并对该待显示区域对应的目标编码数据进行加载,实现对显示窗口对应的图像数据的加载,而避免对整个大图像的图像数据加载,减低对运行内存的占用,提升图像加载的流畅性。

图像展示方法、装置、电子设备及计算机可读存储介质.pdf
本公开提供一种图像展示方法、装置、电子设备及计算机可读存储介质;该方法先检测目标用户的注意力焦点在显示平面中的第一位置参数,其中,显示平面中展示有静态图像,然后根据第一位置参数和各静态图像在显示平面中的第二位置参数确定当前目标静态图像,最后对当前目标静态图像进行动态处理,使当前目标静态图像变化为当前动态图像或视频并播放展示。本公开通过检测目标用户的注意力焦点,并对注意力焦点范围内的展示对象进行动态展示,能够使得图像展示多样化,提高用户体验的趣味性。