
用于确定任务调度结果的方法及装置.pdf

明轩****la

1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于确定任务调度结果的方法及装置.pdf
本申请公开了一种用于确定任务调度结果的方法及装置。方法的一具体实施方式包括:获取任务调度模型,任务调度模型用于表征基于预设约束条件得到的每种可行的任务调度情形下,目标机器人到匹配该目标机器人的目标货架的第一距离成本,每个目标货架到匹配该目标货架的目标工作站的第二距离成本,以及每个目标工作站对于所需的每种物品的未满足需求量;在任务调度模型中加入预设约束条件中的目标条件相关的拉格朗日乘子,将任务调度模型分解为表征机器人与货架的匹配情况的第一子模型,以及表征货架与工作站的匹配情况的第二子模型;在预设约束条件下,
用于确定资源调度路径的方法和装置.pdf
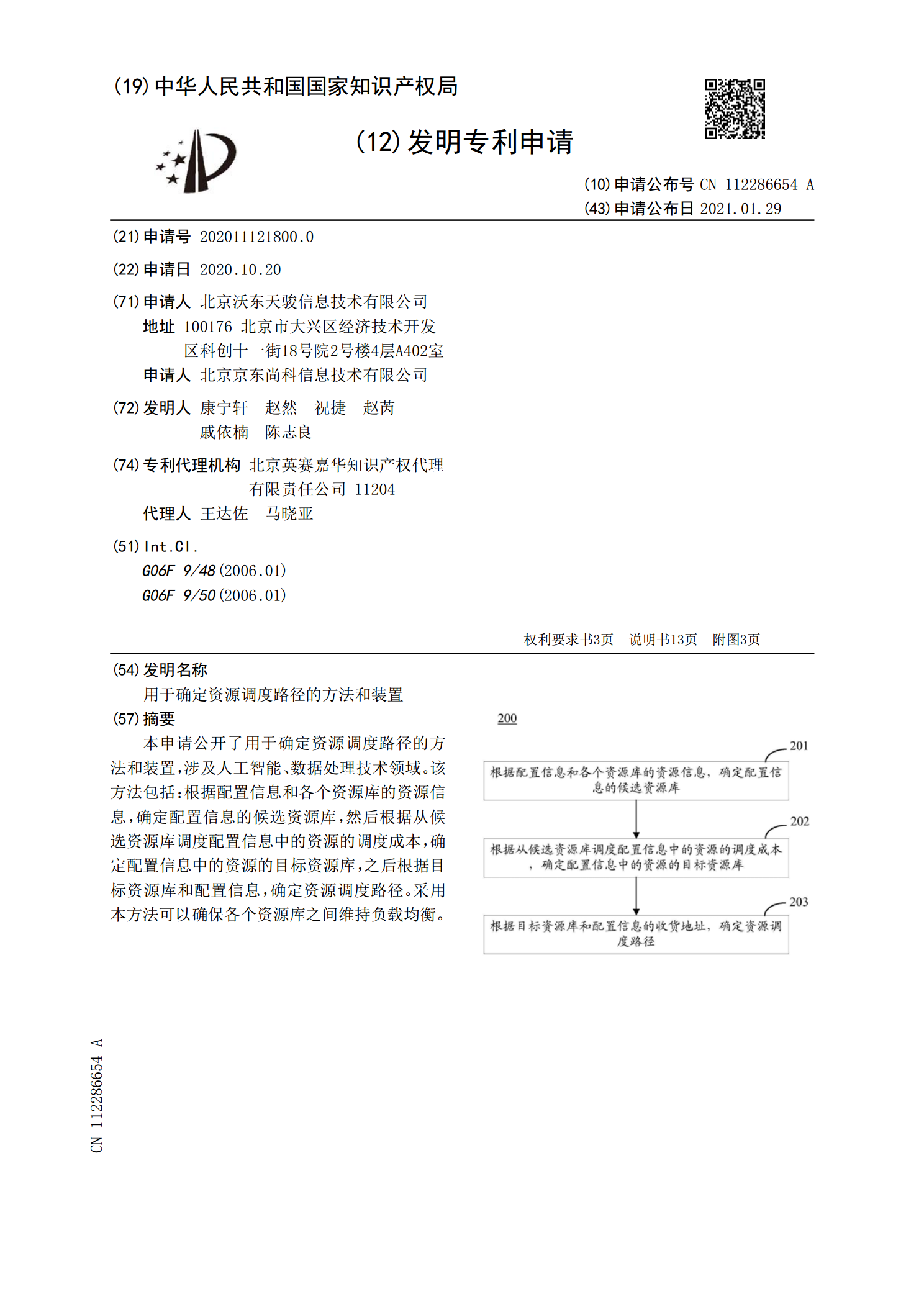
本申请公开了用于确定资源调度路径的方法和装置,涉及人工智能、数据处理技术领域。该方法包括:根据配置信息和各个资源库的资源信息,确定配置信息的候选资源库,然后根据从候选资源库调度配置信息中的资源的调度成本,确定配置信息中的资源的目标资源库,之后根据目标资源库和配置信息,确定资源调度路径。采用本方法可以确保各个资源库之间维持负载均衡。

用于任务调度的方法及装置.pdf
本申请公开了一种用于任务调度的方法及装置。方法的一具体实施方式包括:基于预设约束条件,确定可行的多种任务调度情形,其中,任务调度表征调度机器人集合中的目标机器人将货架集合中的目标货架移动至工作站集合中的目标工作站;在每种可行的任务调度情形下,确定机器人集合中的目标机器人到货架集合中匹配该目标机器人的目标货架的第一距离,每个目标货架到工作站集合中匹配该目标货架的目标工作站的第二距离以及每个目标工作站对于所需的每种物品的未满足需求量;根据每种可行的任务调度情形下的第一距离、第二距离以及未满足需求量,确定任务调
用于确定运行机器学习任务的节点的方法和装置.pdf
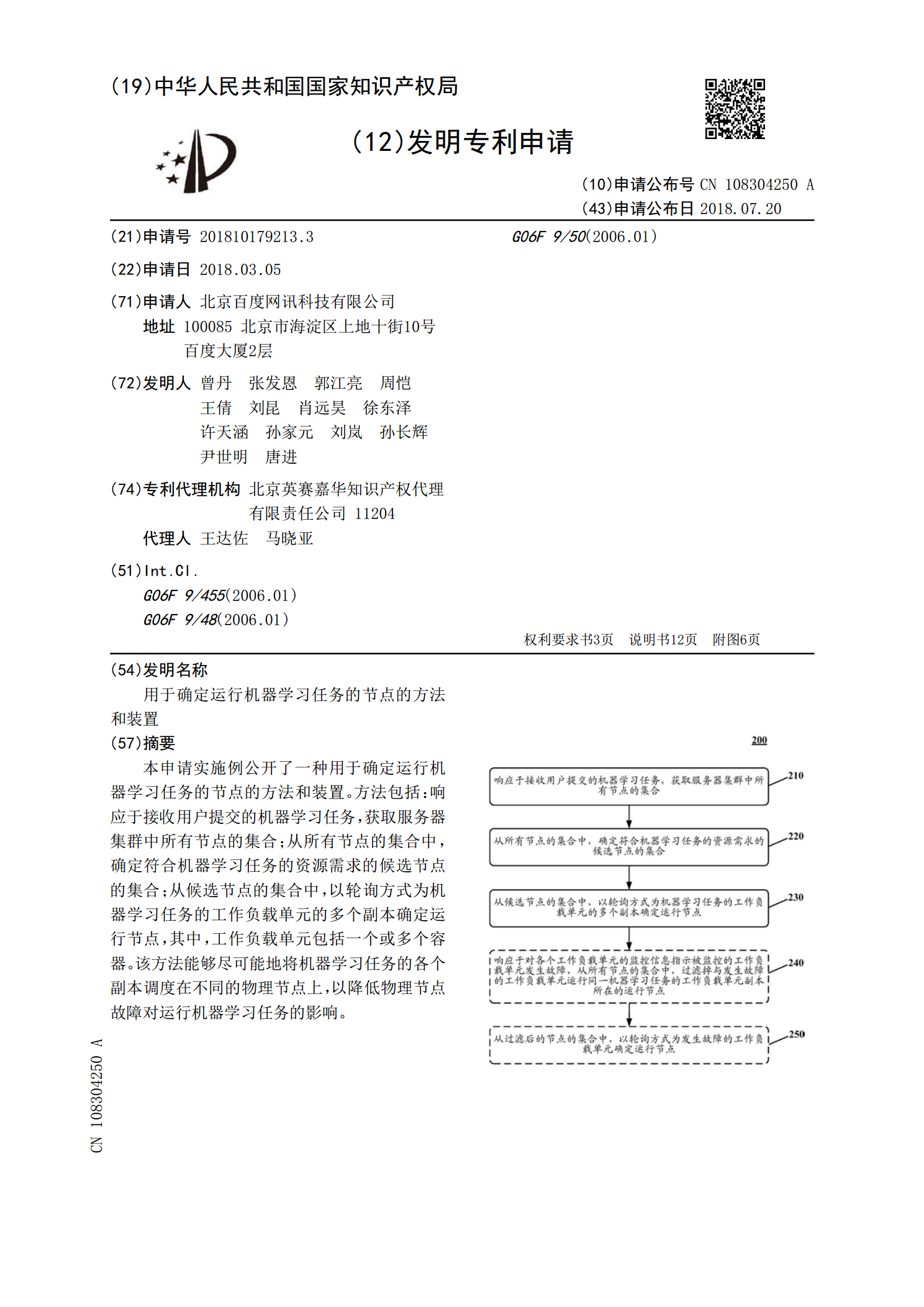
本申请实施例公开了一种用于确定运行机器学习任务的节点的方法和装置。方法包括:响应于接收用户提交的机器学习任务,获取服务器集群中所有节点的集合;从所有节点的集合中,确定符合机器学习任务的资源需求的候选节点的集合;从候选节点的集合中,以轮询方式为机器学习任务的工作负载单元的多个副本确定运行节点,其中,工作负载单元包括一个或多个容器。该方法能够尽可能地将机器学习任务的各个副本调度在不同的物理节点上,以降低物理节点故障对运行机器学习任务的影响。

确定测试结果的方法、装置、存储介质及电子装置.pdf
本申请公开了一种确定测试结果的方法、装置、存储介质及电子装置,涉及智能家居/智慧家庭技术领域,该确定测试结果的方法包括:向待测模块发送测试指令,其中,测试指令用于指示对待测模块的待测功能进行测试;接收待测模块发送的应答指令,其中,应答指令是待测模块对测试指令的应答;在脚本库中获取与应答指令相匹配的目标帧数据;根据目标帧数据确定待测模块的测试结果。解决了相关技术中无法根据应答指令迅速确定测试结果的问题,进而达到了提高确定测试结果的效率。