
一种控制肌电假肢抓握力的方法.pdf

雨巷****碧易

1/5

2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种控制肌电假肢抓握力的方法.pdf
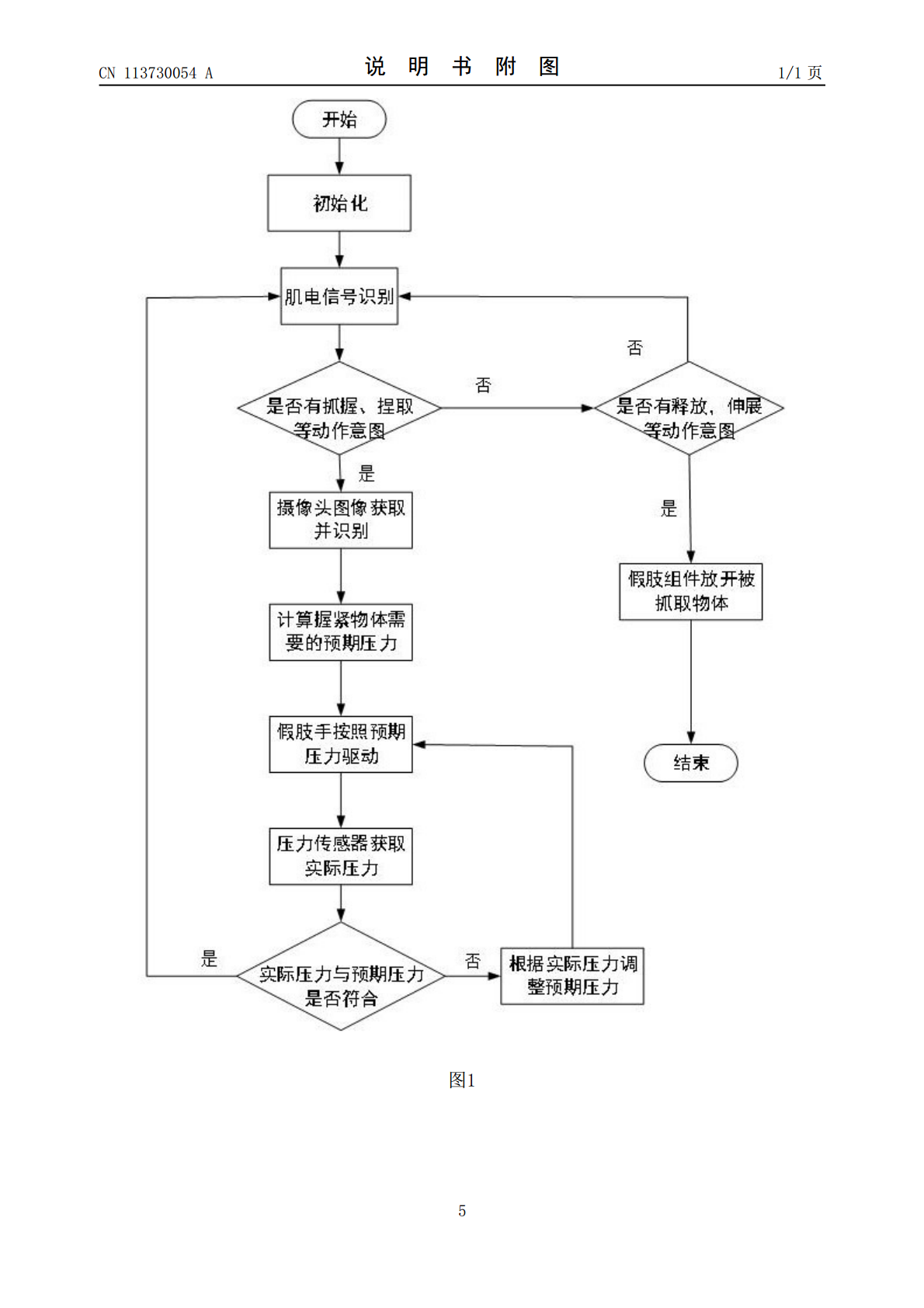
本发明公开了一种控制肌电假肢抓握力的方法,所述方法包括:肌电传感器获取肌电信号,判断用户动作意图;神经网络控制中心识别到用户有抓握、捏取动作意图时,驱动假肢组件按照用户动作意图进行动作;启动摄像模块对动作目标进行拍摄,识别物体并判断握紧物体需要的预期压力;获取压力传感器的信息,与预期压力进行比较,调整假肢组件力施加状态;当识别到用户有释放、伸展等动作意图时,驱动假肢组件放开被抓取物体。本发明通过肌电信号判断用户动作意图,采用视觉与压力双向反馈的方式调节抓握力,增加信息获取渠道,实现肌电假肢在多种手势下的力
一种肌电假肢控制无监督校准方法.pdf
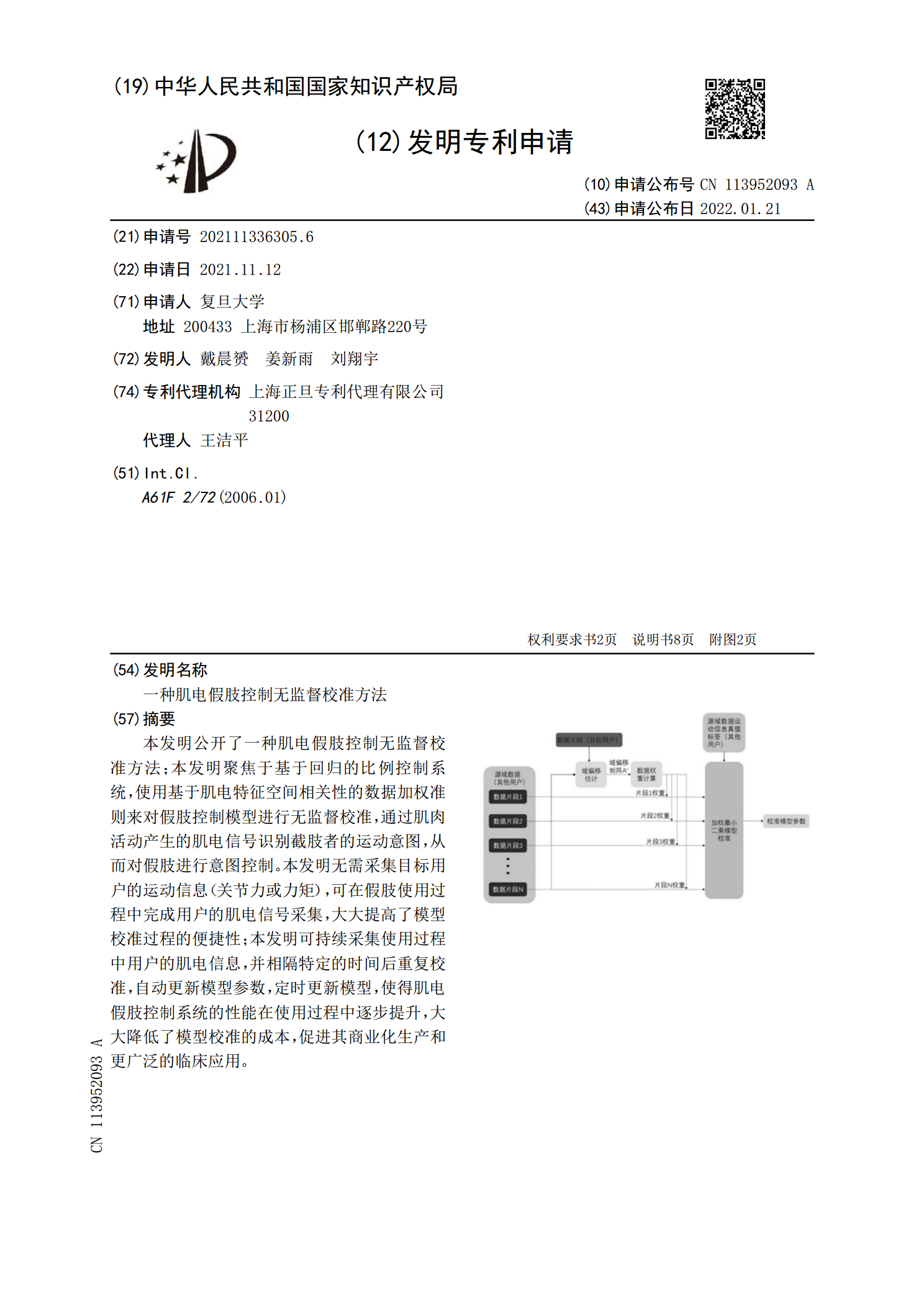
本发明公开了一种肌电假肢控制无监督校准方法;本发明聚焦于基于回归的比例控制系统,使用基于肌电特征空间相关性的数据加权准则来对假肢控制模型进行无监督校准,通过肌肉活动产生的肌电信号识别截肢者的运动意图,从而对假肢进行意图控制。本发明无需采集目标用户的运动信息(关节力或力矩),可在假肢使用过程中完成用户的肌电信号采集,大大提高了模型校准过程的便捷性;本发明可持续采集使用过程中用户的肌电信息,并相隔特定的时间后重复校准,自动更新模型参数,定时更新模型,使得肌电假肢控制系统的性能在使用过程中逐步提升,大大降低了模

基于ARM的肌电假肢手控制器.docx
基于ARM的肌电假肢手控制器基于ARM的肌电假肢手控制器摘要:肢体丧失是一种严重的残疾,给患者的生活和工作带来了巨大的困难。肌电假肢手是一种常见的康复设备,可以通过采集人体肌肉信号来实现肢体运动的控制。本文提出了一种基于ARM的肌电假肢手控制器,该控制器采用ARM处理器作为主控制单元,通过采集和分析肌电信号实现对假肢手的运动控制。实验结果表明,该控制器具有良好的实时性和稳定性,可以有效地帮助肢体丧失患者恢复手部功能。关键词:ARM,肌电,假肢,手控制器引言:肢体丧失是指因疾病、意外事故等原因导致身体一部分

肌电控制假肢康复.pptx
假肢康复概述与重要性假肢康复概述与重要性肌电控制假肢原理简介肌电控制假肢原理简介肌电控制假肢原理简介肌电信号采集与处理技术肌电信号采集与处理技术肌电信号采集与处理技术假肢控制算法与实现假肢控制算法与实现假肢控制算法与实现假肢控制算法与实现肌电控制假肢的设计与优化肌电控制假肢的设计与优化肌电控制假肢的设计与优化肌电控制假肢的设计与优化临床试验与性能评估临床试验与性能评估临床试验与性能评估临床试验与性能评估康复过程中的训练与方法康复过程中的训练与方法康复过程中的训练与方法康复过程中的训练与方法未来趋势与挑战未

欠驱动假肢手抓握性能优化与抓握力控制研究.pptx
欠驱动假肢手抓握性能优化与抓握力控制研究目录添加目录项标题研究背景与意义假肢手的发展现状欠驱动假肢手的特点研究意义与应用前景欠驱动假肢手抓握性能优化抓握性能评价指标结构设计优化材料选择与优化实验验证与分析欠驱动假肢手抓握力控制研究抓握力控制算法设计实验平台搭建与测试控制策略优化与实现实验结果与分析应用实例与效果评估实际应用场景与需求分析应用实例介绍效果评估方法与标准实例效果评估与分析总结与展望研究成果总结未来研究方向与展望感谢观看