
一种清洁机器人的擦地方法及清洁机器人.pdf

论文****轩吖


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种清洁机器人的擦地方法及清洁机器人.pdf
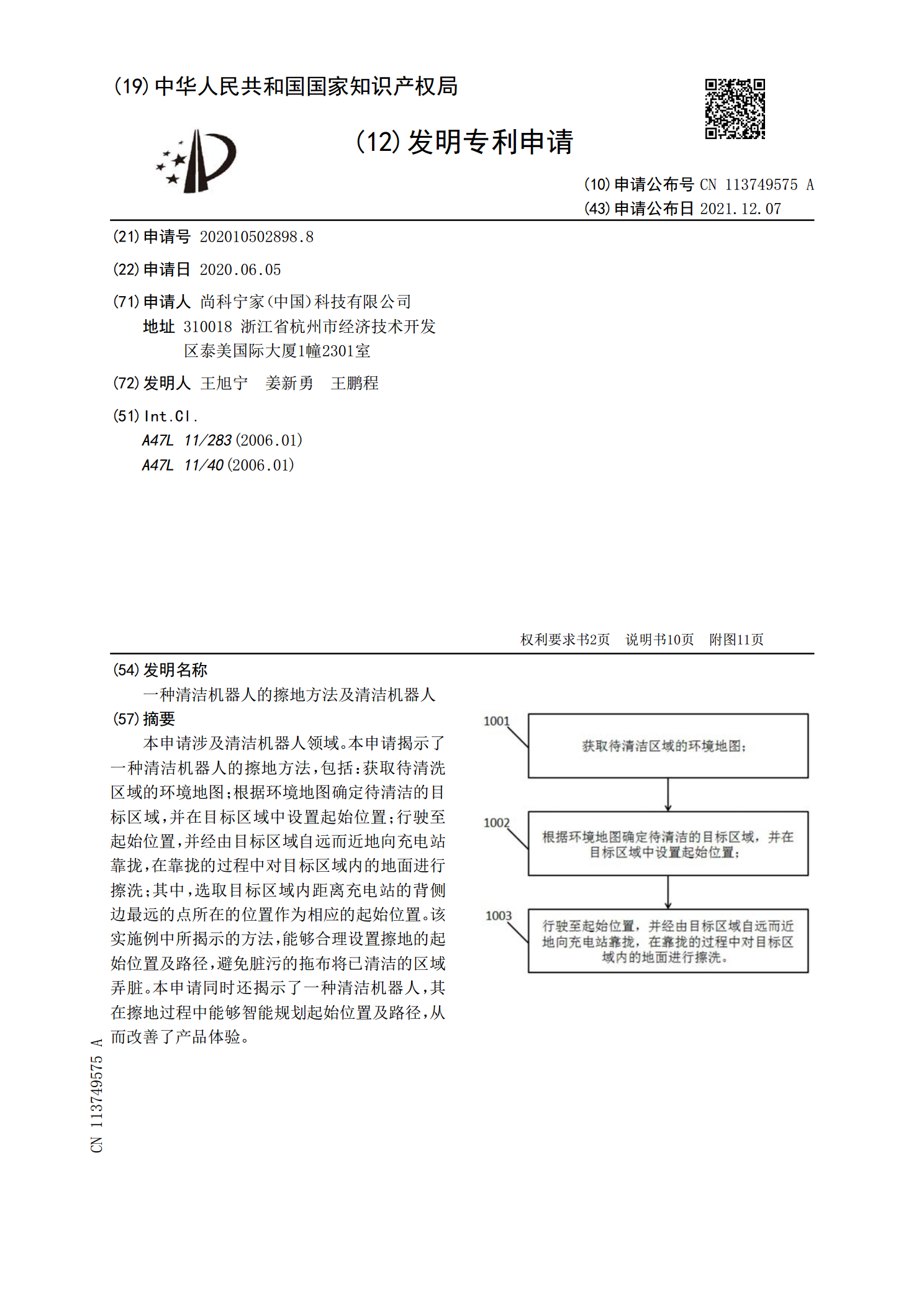
本申请涉及清洁机器人领域。本申请揭示了一种清洁机器人的擦地方法,包括:获取待清洗区域的环境地图;根据环境地图确定待清洁的目标区域,并在目标区域中设置起始位置;行驶至起始位置,并经由目标区域自远而近地向充电站靠拢,在靠拢的过程中对目标区域内的地面进行擦洗;其中,选取目标区域内距离充电站的背侧边最远的点所在的位置作为相应的起始位置。该实施例中所揭示的方法,能够合理设置擦地的起始位置及路径,避免脏污的拖布将已清洁的区域弄脏。本申请同时还揭示了一种清洁机器人,其在擦地过程中能够智能规划起始位置及路径,从而改善了产

一种擦地机器人及其清洁方法.pdf
一种擦地机器人(100),包括:壳体(10);设置在壳体(10)内的供液装置(30),用于向擦地装置(20)提供清洁液;擦地装置(20),设置在壳体(10)上,由第一驱动机构(21)驱动运动,以擦拭工作表面;回收装置(40),设置在壳体(10)内,用于回收擦地装置(20)擦拭工作表面后遗留在工作表面的污液;控制装置(60),分别与擦地装置(20)、供液装置(30)和回收装置(40)连接,以控制擦地机器人(100)在工作区域的行走并工作。还提供了一种擦地机器人(100)的清洁方法。
一种清洁机器人的滚动清洁部件的清洁方法及清洁机器人.pdf
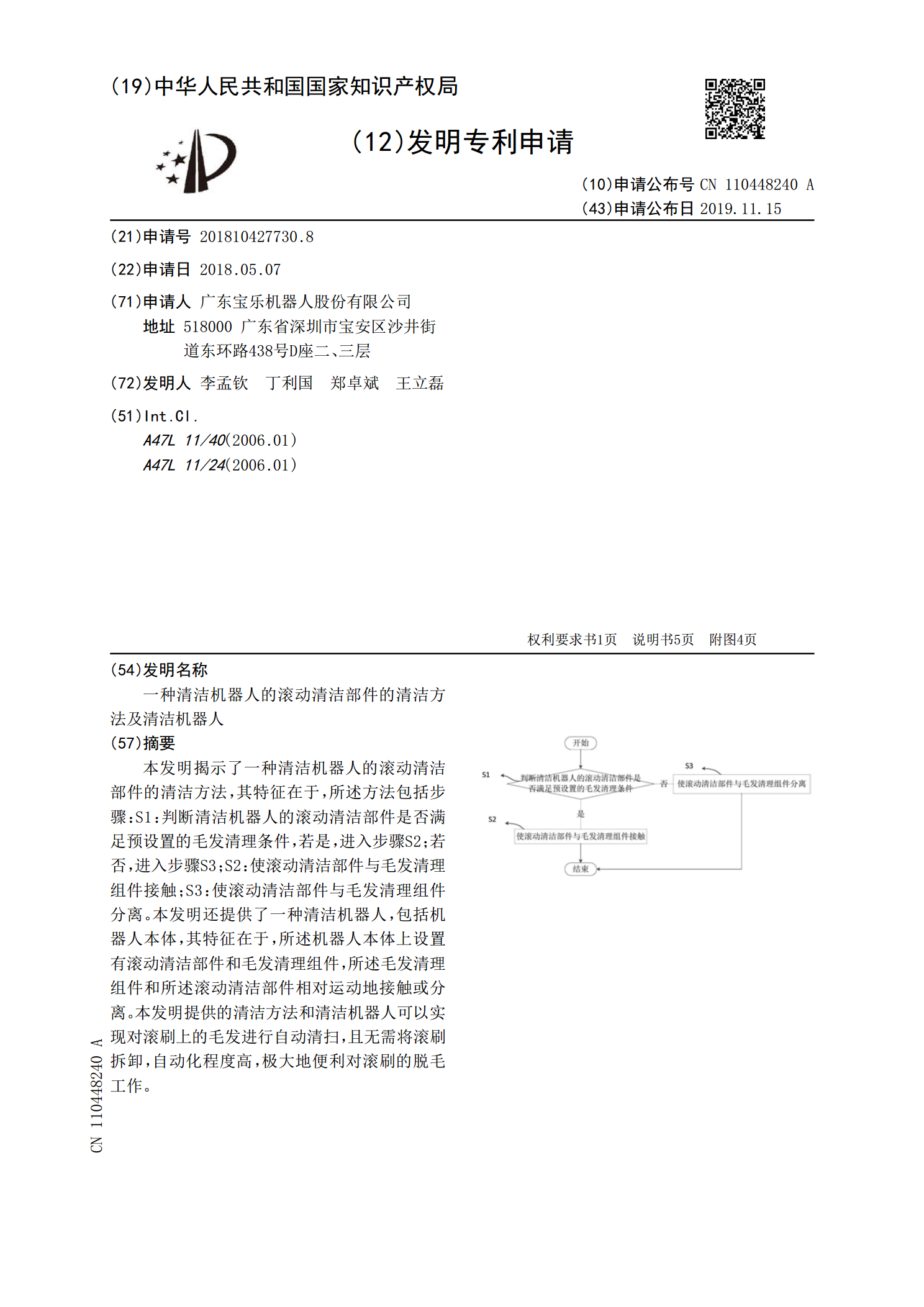
本发明揭示了一种清洁机器人的滚动清洁部件的清洁方法,其特征在于,所述方法包括步骤:S1:判断清洁机器人的滚动清洁部件是否满足预设置的毛发清理条件,若是,进入步骤S2;若否,进入步骤S3;S2:使滚动清洁部件与毛发清理组件接触;S3:使滚动清洁部件与毛发清理组件分离。本发明还提供了一种清洁机器人,包括机器人本体,其特征在于,所述机器人本体上设置有滚动清洁部件和毛发清理组件,所述毛发清理组件和所述滚动清洁部件相对运动地接触或分离。本发明提供的清洁方法和清洁机器人可以实现对滚刷上的毛发进行自动清扫,且无需将滚刷

智能滚筒抹布擦地扫地清洁机器人.pdf
一种智能滚筒抹布擦地扫地清洁机器人,包括壳体,壳体内部设有隔板,隔板上设有清水箱、带真空泵的污水箱、驱动电机和控制机构;隔板中部穿设有连接轴,连接轴套设有驱动轮,驱动轮底部设有旋转平台;旋转平台底面相对设有两个扫地机构,两个扫地机构之间相对设有两个擦地机构,各擦地机构包括滚筒及套设在滚筒外周的抹布套;滚筒中部设有滚轴,滚轴穿设在旋转平台的固定板上,滚轴末端设有被动锥齿轮,连接轴底部套主动锥齿轮;旋转平台底面设有带清洗毛刷的清洗轮,滚筒的与清洗轮相对的一侧设有脱水器,脱水器上方设有带喷口的喷水管;连接轴底部

一种清洁机器人的场景识别方法及清洁机器人.pdf
本发明涉及一种清洁机器人的场景识别方法及清洁机器人,其中场景识别方法其特征在于包括如下步骤:步骤1、在清洁机器人内预存家居场景中N类常见的目标物体的类别名称;步骤2、清洁机器人采集场景图像,对场景图像进行目标物体检测,通过检测到的目标物体与权重矩阵之间的线性组合来最终确定当前环境为特定家居场景的概率Z;步骤3、引入家居场景矩阵H;步骤4、取i=argmax(Z),i为Z中最大得分a