
一种基于头肩检测的多目标跟踪方法.pdf

Th****84


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于头肩检测的多目标跟踪方法.pdf
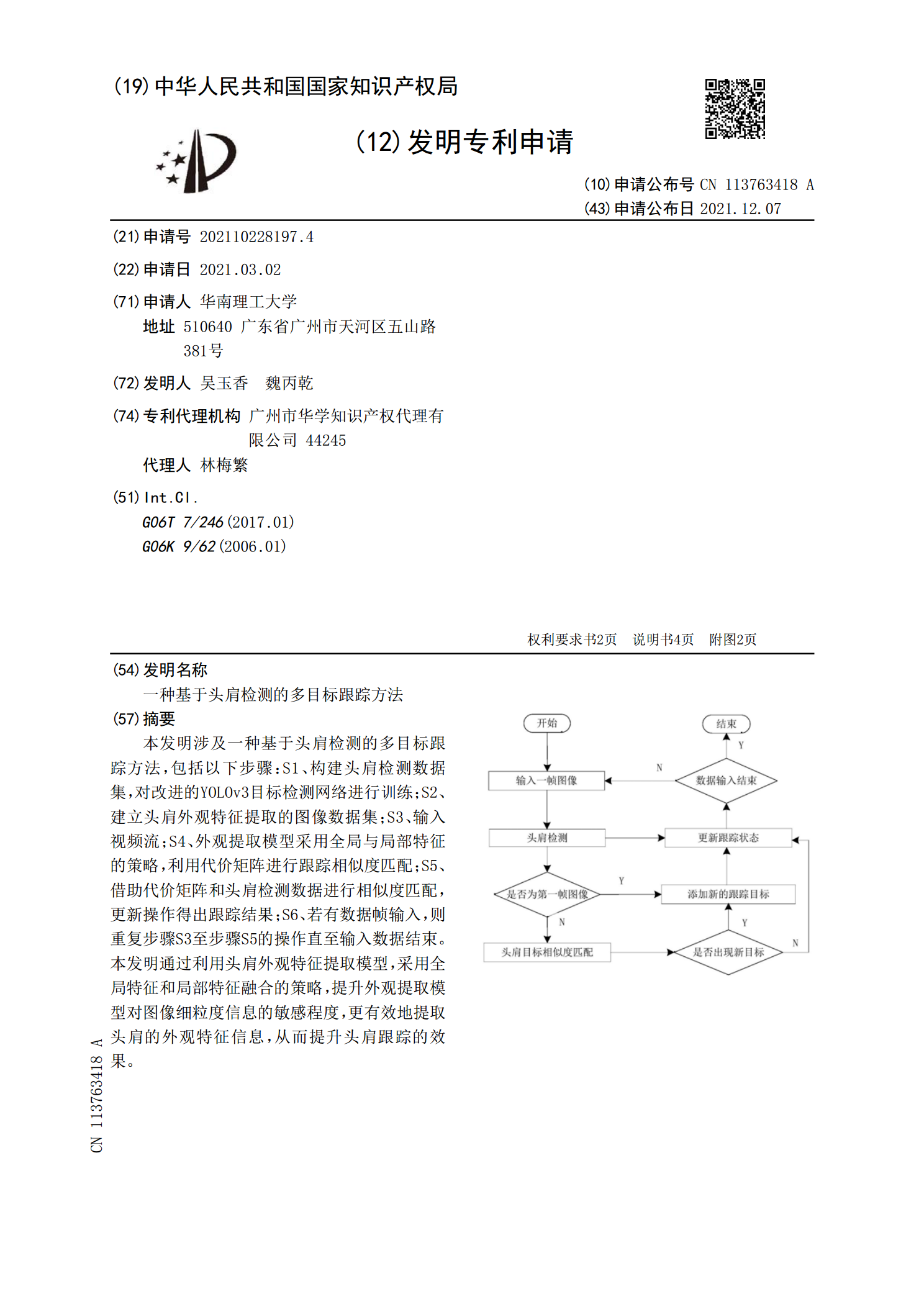
本发明涉及一种基于头肩检测的多目标跟踪方法,包括以下步骤:S1、构建头肩检测数据集,对改进的YOLOv3目标检测网络进行训练;S2、建立头肩外观特征提取的图像数据集;S3、输入视频流;S4、外观提取模型采用全局与局部特征的策略,利用代价矩阵进行跟踪相似度匹配;S5、借助代价矩阵和头肩检测数据进行相似度匹配,更新操作得出跟踪结果;S6、若有数据帧输入,则重复步骤S3至步骤S5的操作直至输入数据结束。本发明通过利用头肩外观特征提取模型,采用全局特征和局部特征融合的策略,提升外观提取模型对图像细粒度信息的敏感程

一种基于头肩距的人体检测方法.pdf
本发明提出一种基于头肩距的人体检测方法。本发明方法在一般人体检测方法的基础上对非人体的目标做进一步人体检测:首先确定满足头发颜色的图像区域;然后确定颜色区域界定的人体头肩模型的聚类范围;最后采用均值漂移算法,获得与聚类范围内每个像素一一对应的收敛值所构造的收敛矩阵,针对收敛矩阵内各个元素,先后依据目标图像的空间信息和颜色信息进行聚类,继而对聚类范围内的像素进行了聚类,判断每个聚类类别是否符合人体头肩模型,提取符合人体头肩模型的类别区域轮廓,获得头肩轮廓。本发明方法克服了人与人之间存在遮挡情况下人体头肩模型

一种基于头肩模型和IOU跟踪的徘徊逗留行为分析方法.pdf
一种基于头肩模型和IOU跟踪的徘徊逗留行为分析方法,包括以下步骤:S1:通过网上爬取行人图片及截取监控视频中包含行人的图片,对图片中的行人头肩进行标注和清洗,建立头肩数据集;S2:对监控视频进行检测,返回视频画面中检测出的行人头肩;S4:对行人头肩采用Iou‑net跟踪算法进行多目标跟踪;S5:跟踪目标的运动轨迹路径,并与设定的阈值进行对比;S6:输出徘徊逗留目标。本发明中,通过建立头肩数据集,并利用深度学习检测算法进行训练。通过训练得到的模型,对监控视频中的行人头肩进行检测,结合Iou‑net跟踪算法对

一种头肩区域检测方法及装置.pdf
本发明涉及图像检测技术领域,特别涉及一种头肩区域检测方法及装置。该方法为:获取待检测图像;基于训练完成的,包含有特征提取网络层,候选框生成网络层和目标检测网络层的网络模型对上述待检测图像进行检测,得到相应的检测结果,其中,上述特征提取网络层具有提取融合特征,保留原始特征信息和调整模型大小的功能;基于上述检测结果判定所述待检测图形中存在头肩区域时,确定上述头肩区域在上述待检测图像中的位置。采用上述方法,对待检测原图的特征提取更全面,从而使得候选框生成网络层能够从多尺度特征来进行候选框的生成,保证了对拍摄质量

一种基于头肩及跨线检测的人员尾随判定方法.pdf
本发明提供一种基于头肩及跨线检测的人员尾随判定方法,包括如下步骤:从获取的视频流提取视频帧,在视频帧的闸机位置预设一条跨线线段;将视频帧转换为RGB格式并缩放到规定大小,输入给目标检测模型;从视频帧提取头肩特征图,从头肩特征图中检测头肩目标;对头肩目标进行跟踪,定义跨过跨线线段为跨线,判定头肩目标是否跨线及跨线方向;在设定时间内,连续两个跨线的头肩目标为同一方向,则将后一个跨线的头肩目标判定为尾随者。本发明提出一种可采用摄像机垂直拍摄画面、头肩检测及跨线分析的人员尾随检测方法。可在不影响原通行环境架构的基