
弹载大斜视小孔径多通道SAR的成像方法.pdf

书生****66

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
弹载大斜视小孔径多通道SAR的成像方法.pdf
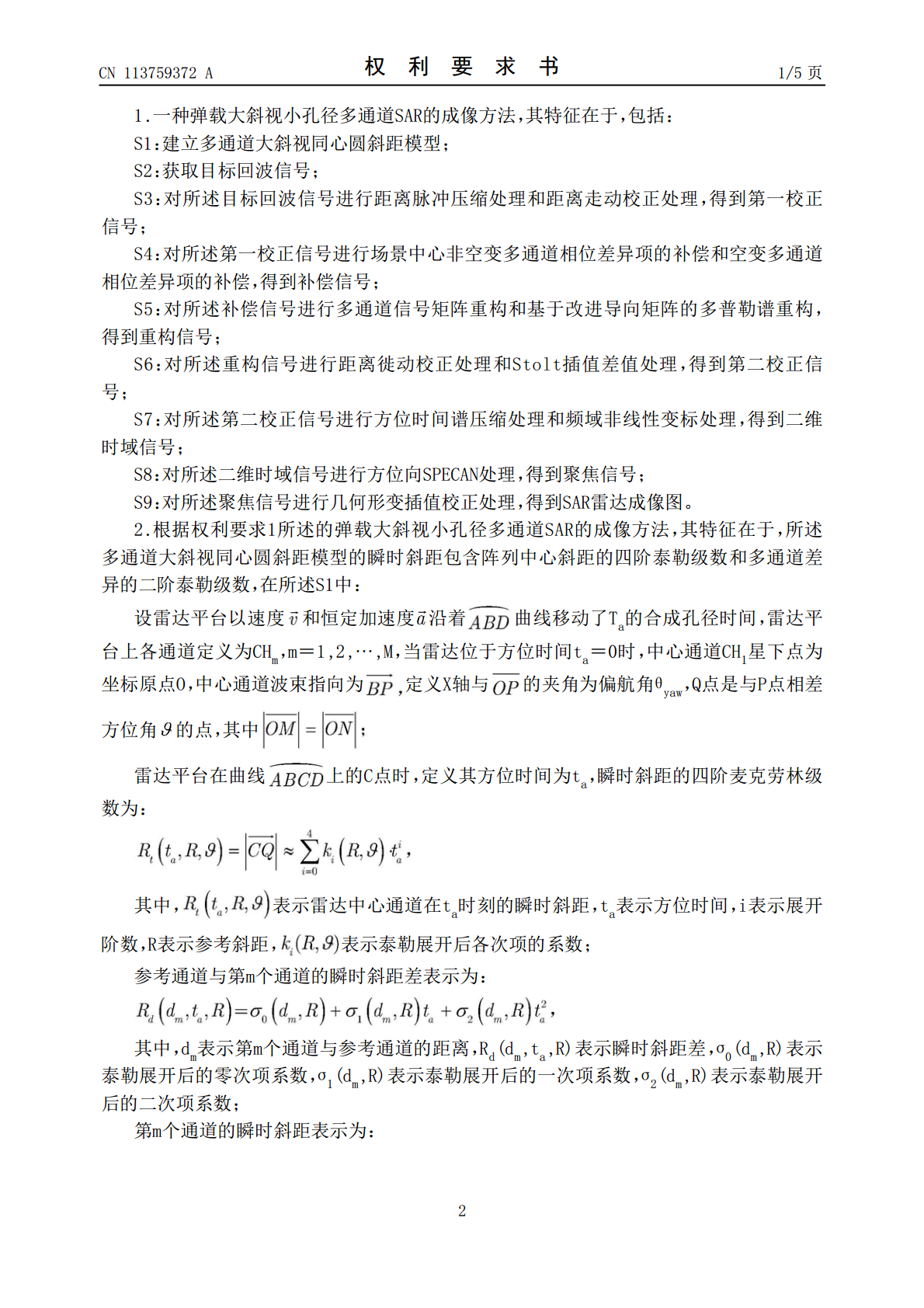
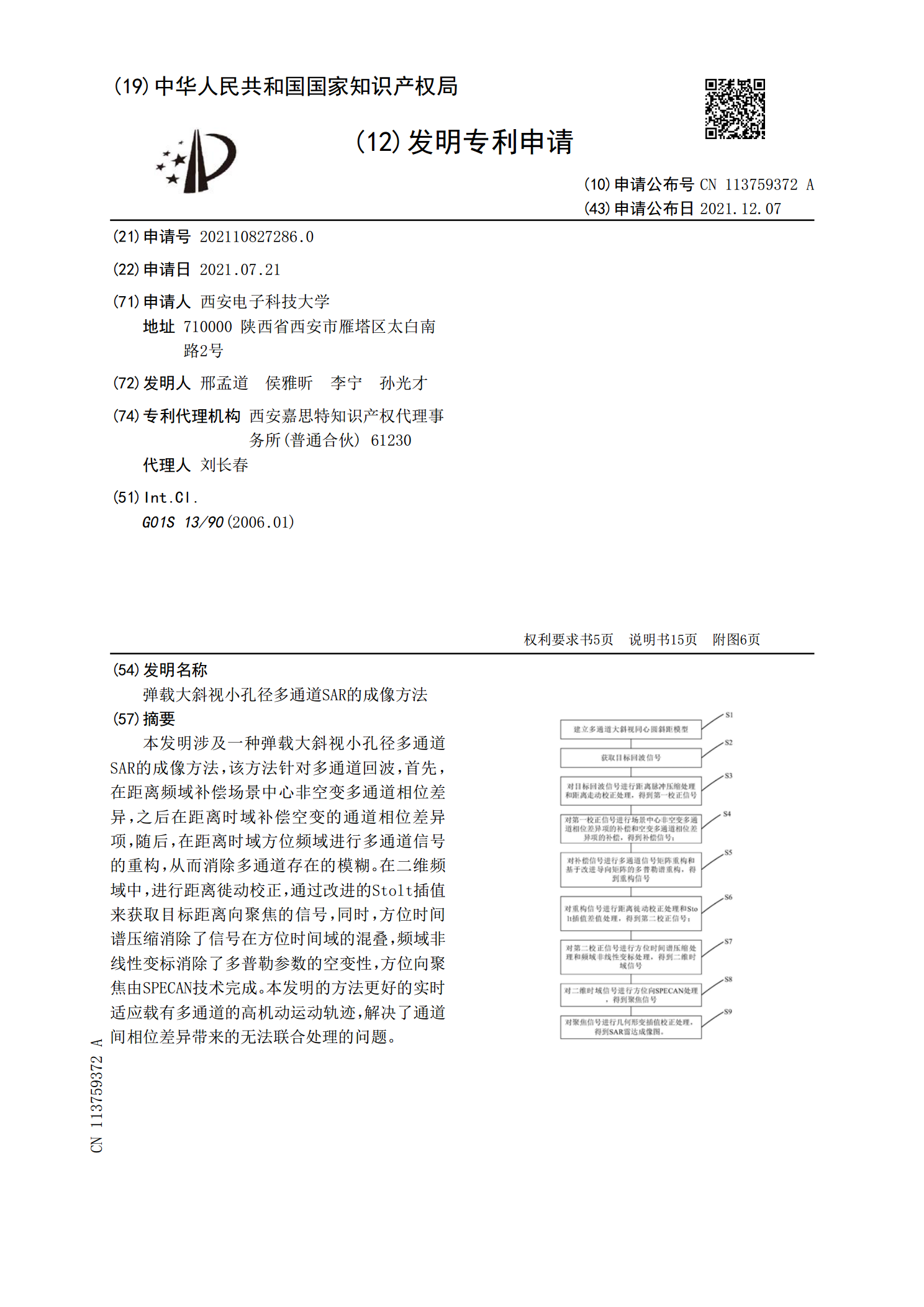
本发明涉及一种弹载大斜视小孔径多通道SAR的成像方法,该方法针对多通道回波,首先,在距离频域补偿场景中心非空变多通道相位差异,之后在距离时域补偿空变的通道相位差异项,随后,在距离时域方位频域进行多通道信号的重构,从而消除多通道存在的模糊。在二维频域中,进行距离徙动校正,通过改进的Stolt插值来获取目标距离向聚焦的信号,同时,方位时间谱压缩消除了信号在方位时间域的混叠,频域非线性变标消除了多普勒参数的空变性,方位向聚焦由SPECAN技术完成。本发明的方法更好的实时适应载有多通道的高机动运动轨迹,解决了通道

一种弹载弧线俯冲大斜视TOPS SAR的成像方法.pdf
本发明公开了一种弹载弧线俯冲大斜视TOPSSAR的成像方法。该成像方法主要解决现有技术在机动轨迹大斜视下SAR成像以解决机动平台上的倾斜叠加导致方位频谱混叠和目标多普勒中心非线性问题。针对方位向混叠,提出了一种基于联合时域解斜的成像方法。首先,通过改进的时域线性去斜来获得展开的二维频谱。在二维频域中,进行距离徙动校正之后,通过多普勒域非线性去斜来获取目标时频线对齐的信号。同时,通过频域非线性变标消除了空变多普勒参数的空变性。方位向聚焦由SPECAN技术完成。最后,通过仿真和实测TOPSSAR数据验证了

基于改进wk算法的弹载SAR斜视成像.docx
基于改进wk算法的弹载SAR斜视成像摘要本文基于改进wk算法,研究了弹载SAR斜视成像技术。首先简单介绍了弹载SAR斜视成像技术的基本原理和特点,然后分析了传统的wk算法存在的问题,提出了改进的wk算法,并进行了算法仿真实验。最后,通过实验结果的分析说明了改进后的wk算法在弹载SAR斜视成像中的有效性和优越性。关键词:弹载SAR,斜视成像,wk算法,改进算法,算法仿真实验。1引言弹载合成孔径雷达(SAR)技术是一种利用雷达信号进行高分辨率成像的技术,具有在任意天气和光照条件下获取高分辨率、全天候的图像的能

斜视偏置相位中心方位多波束星载SAR 成像方法.pdf
本发明公开了一种斜视偏置相位中心方位多波束星载SAR成像方法,包括以下步骤:采用方位向相位补偿函数H1,n(f,t)分别对各方位波束接收的回波数据进行相应的相位补偿;采用方位重构滤波器组P(fa)对经相位补偿后的回波数据的多普勒频谱在距离-多普勒域内进行重建,并利用频谱还原函数H2(fr,t)恢复目标回波信号的多普勒历程;利用改进的RMA算法进行回波数据的聚焦成像。本发明通过方位预处理操作调整了回波信号的多普勒历程,解决了方位信号采样率不足的问题;并且通过斜视方位多波束信号重建,解决了方位多通道非均匀采样

基于子孔径的曲线航迹弹载SAR波前重建成像方法及系统.pdf
本发明属于雷达成像技术领域,特别涉及一种基于子孔径的曲线航迹弹载SAR波前重建成像方法及系统,针对曲线航迹弹载SAR成像问题,通过分析弹载平台曲线飞行情况下的SAR回波信号瞬时多普勒频率变化特点,将弹载SAR曲线孔径分段处理,得到若干子孔径,采用直线孔径趋于各子孔径并进行子孔径粗分辨成像;针对各子孔径数据分别进行粗分辨相干成像;将各子孔径成像图像进行旋转和相干叠加,得到全孔径聚焦雷达图像。本发明较好地处理了弹载SAR平台的各种曲线孔径,对曲线航迹SAR导引头的工程化具有重要意义;并进一步通过仿真数据表明,