
一种电力作业梯子角度检测方法.pdf

努力****弘毅

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电力作业梯子角度检测方法.pdf
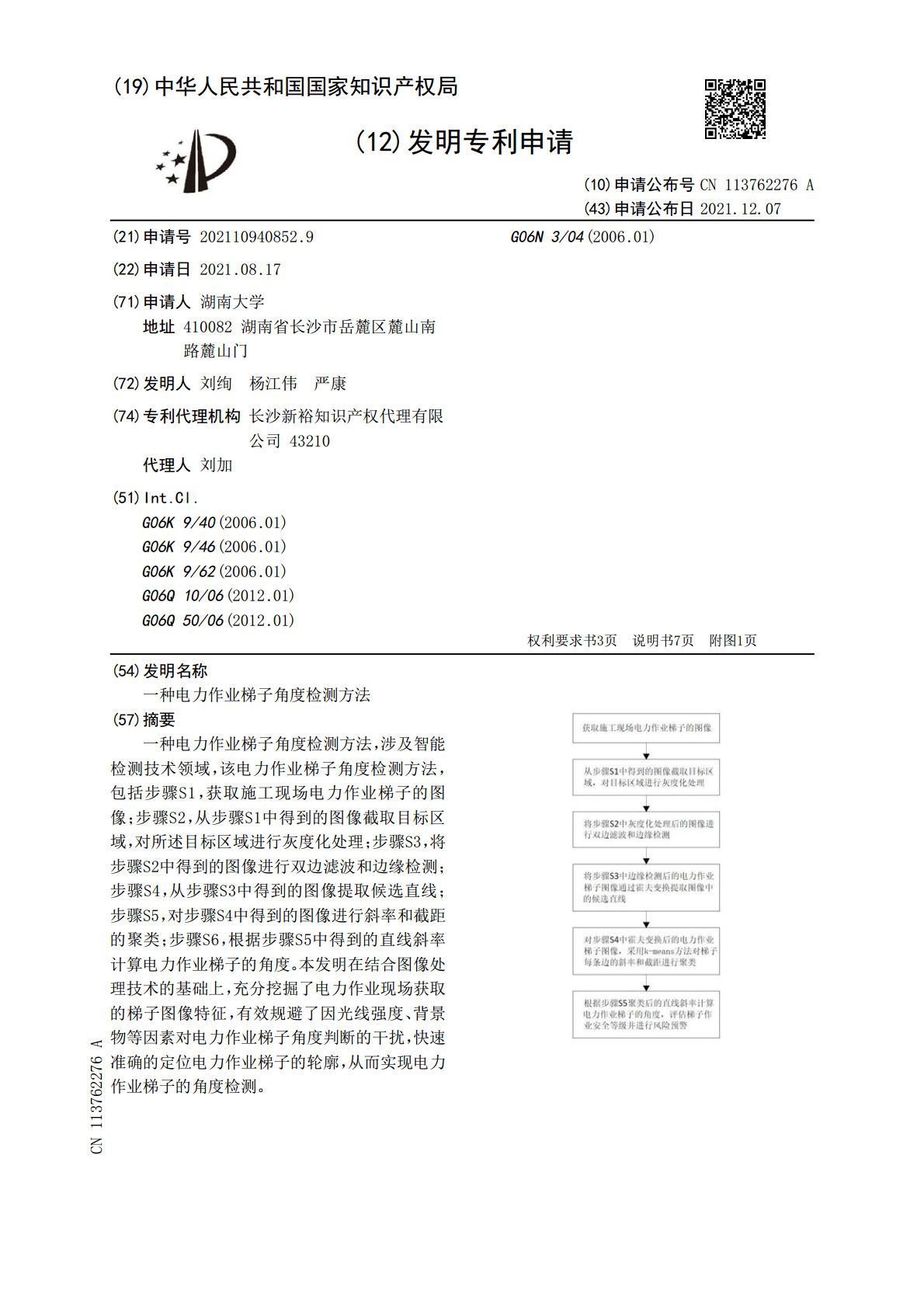
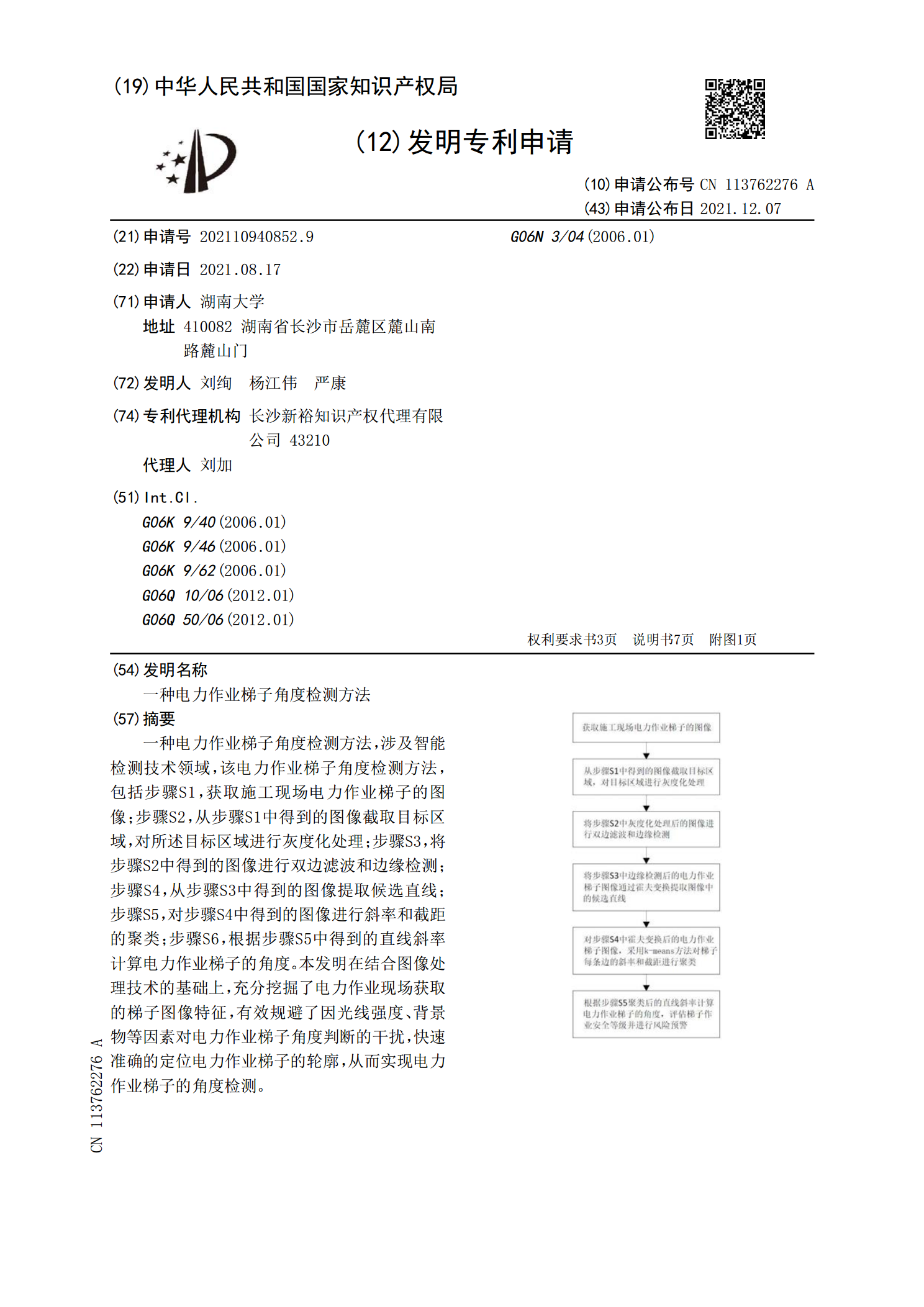
一种电力作业梯子角度检测方法,涉及智能检测技术领域,该电力作业梯子角度检测方法,包括步骤S1,获取施工现场电力作业梯子的图像;步骤S2,从步骤S1中得到的图像截取目标区域,对所述目标区域进行灰度化处理;步骤S3,将步骤S2中得到的图像进行双边滤波和边缘检测;步骤S4,从步骤S3中得到的图像提取候选直线;步骤S5,对步骤S4中得到的图像进行斜率和截距的聚类;步骤S6,根据步骤S5中得到的直线斜率计算电力作业梯子的角度。本发明在结合图像处理技术的基础上,充分挖掘了电力作业现场获取的梯子图像特征,有效规避了因光
电力作业施工梯子搬运检测方法、系统及存储介质.pdf
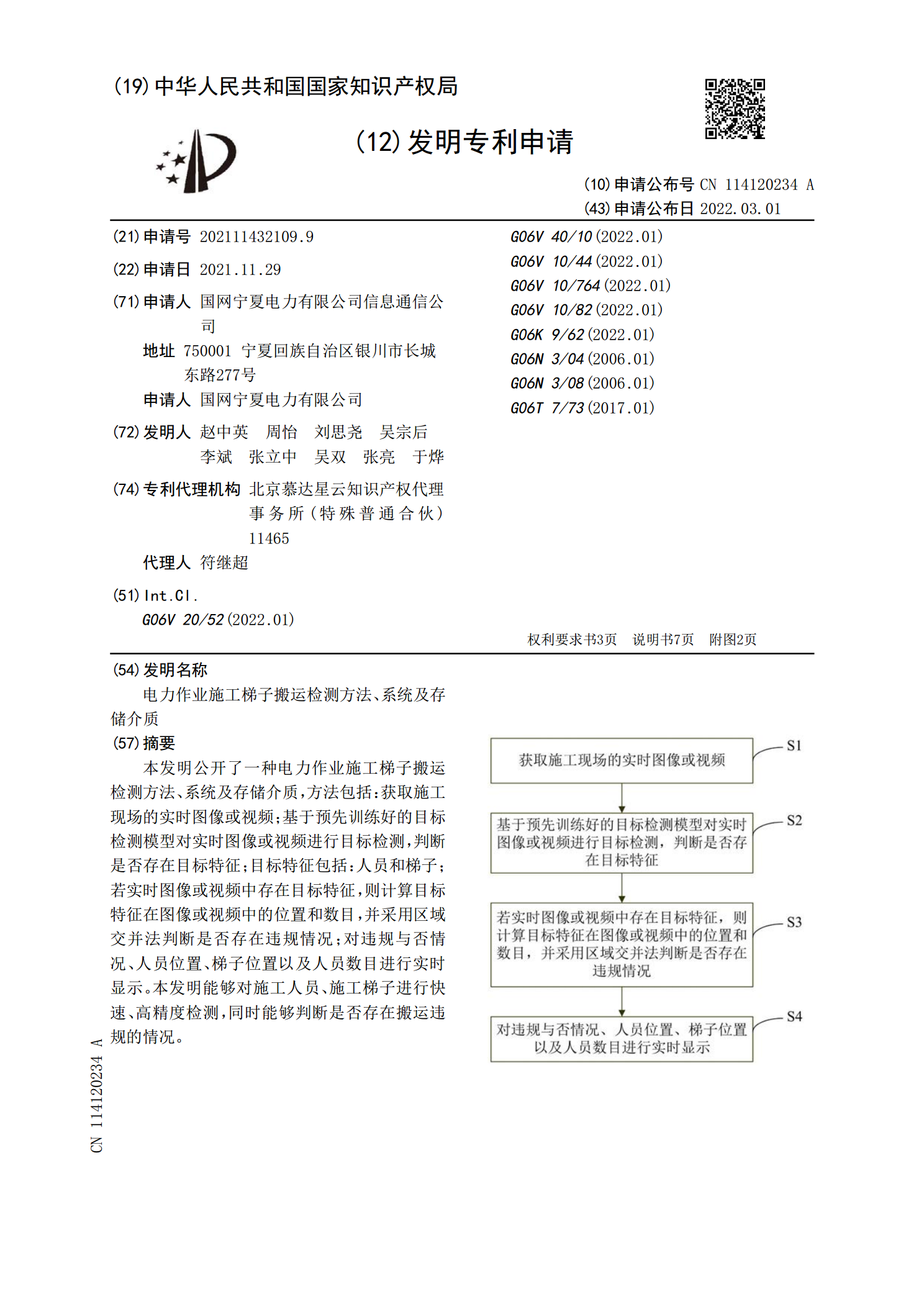
本发明公开了一种电力作业施工梯子搬运检测方法、系统及存储介质,方法包括:获取施工现场的实时图像或视频;基于预先训练好的目标检测模型对实时图像或视频进行目标检测,判断是否存在目标特征;目标特征包括:人员和梯子;若实时图像或视频中存在目标特征,则计算目标特征在图像或视频中的位置和数目,并采用区域交并法判断是否存在违规情况;对违规与否情况、人员位置、梯子位置以及人员数目进行实时显示。本发明能够对施工人员、施工梯子进行快速、高精度检测,同时能够判断是否存在搬运违规的情况。

一种踏板角度可调式梯子.pdf
本发明公开了一种踏板角度可调式梯子,包括梯子本体、支撑腿旋转座、固定孔、辅旋转轴和倾斜支撑杆,所述梯子本体背面的顶部固定安装有支撑腿旋转座,且支撑腿旋转座上通过旋转座旋转安装有支撑腿,所述梯子本体之间通过主旋转轴等间距活动安装有踏板,且踏板两侧远离主旋转轴的一端通过辅旋转轴安装有踏板安装架,所述固定孔上安装有贯穿踏板安装架的固定螺栓,所述踏板安装架的中间部位通过铰接机构安装有倾斜支撑杆。本发明可以根据需求进行倾斜,同时配合设置的踏板安装架可以对踏板进行支撑,且能实现角度的调节,提高了梯子的灵活性,设置的倾

一种电力安全梯子.pdf
本发明公开了一种电力安全梯子,其特征在于:所述梯子包括竖杆Ⅰ和竖杆Ⅱ,竖杆Ⅰ和竖杆Ⅱ的底端均设置有地锚杆,竖杆Ⅰ和竖杆Ⅱ之间设置有若干横杆;竖杆Ⅰ和竖杆Ⅱ的下部设置有支撑结构,支撑结构包括支撑杆Ⅰ和支撑杆Ⅱ,支撑杆Ⅰ和支撑杆Ⅱ分别铰接在竖杆Ⅰ和竖杆Ⅱ上,支撑杆Ⅰ和支撑杆Ⅱ的底端均设置有地锚杆;竖杆Ⅰ和竖杆Ⅱ的顶端设置有安全装置,安全装置包括安全带和锁扣,安全带和锁扣分别设置在两个竖杆顶端上。本发明的电力安全梯子,减少了梯子倾倒的风险,保证了梯子不会发生倾倒,方便上下传输电气配件,增加了维修工人维修的效率。

一种电力检修用梯子.pdf
本发明公开了一种电力检修用梯子,包括两个支撑杆,两个支撑杆之间固定连接有脚踏杆,所述支撑杆的侧面开设有直角凹槽,所述支撑杆的内壁通过直角凹槽开设有转动通孔,所述支撑杆的内壁通过转动通孔转动连接有连接杆。本发明通过设置放置箱,将需要使用的工具放入放置箱中,转动螺纹杆,将螺纹杆从螺纹凹槽中转出,推动螺纹杆,螺纹杆通过螺纹通孔推动转动盘转动,转动盘通过连接杆带动绕线轮转动,绕线轮绕设拉绳,改变拉绳的长度,放置箱向上移动,当放置箱上升到合适的高度时,反向转动螺纹杆,将螺纹杆与螺纹凹槽螺纹连接,从而放置箱的位置锁定