
一种源端网络拥塞传输控制方法.pdf

书生****aa

1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种源端网络拥塞传输控制方法.pdf
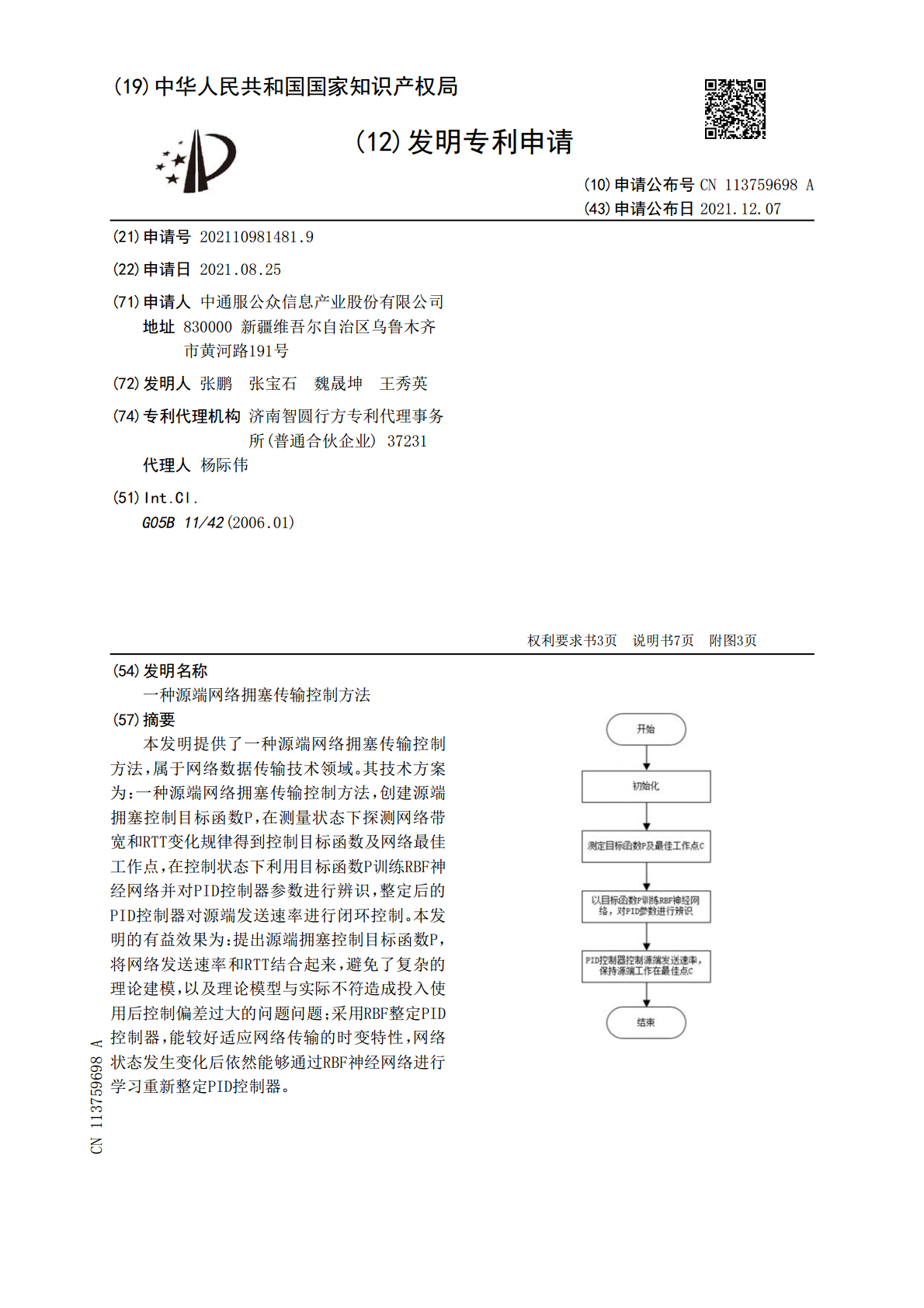
本发明提供了一种源端网络拥塞传输控制方法,属于网络数据传输技术领域。其技术方案为:一种源端网络拥塞传输控制方法,创建源端拥塞控制目标函数P,在测量状态下探测网络带宽和RTT变化规律得到控制目标函数及网络最佳工作点,在控制状态下利用目标函数P训练RBF神经网络并对PID控制器参数进行辨识,整定后的PID控制器对源端发送速率进行闭环控制。本发明的有益效果为:提出源端拥塞控制目标函数P,将网络发送速率和RTT结合起来,避免了复杂的理论建模,以及理论模型与实际不符造成投入使用后控制偏差过大的问题问题;采用RBF整
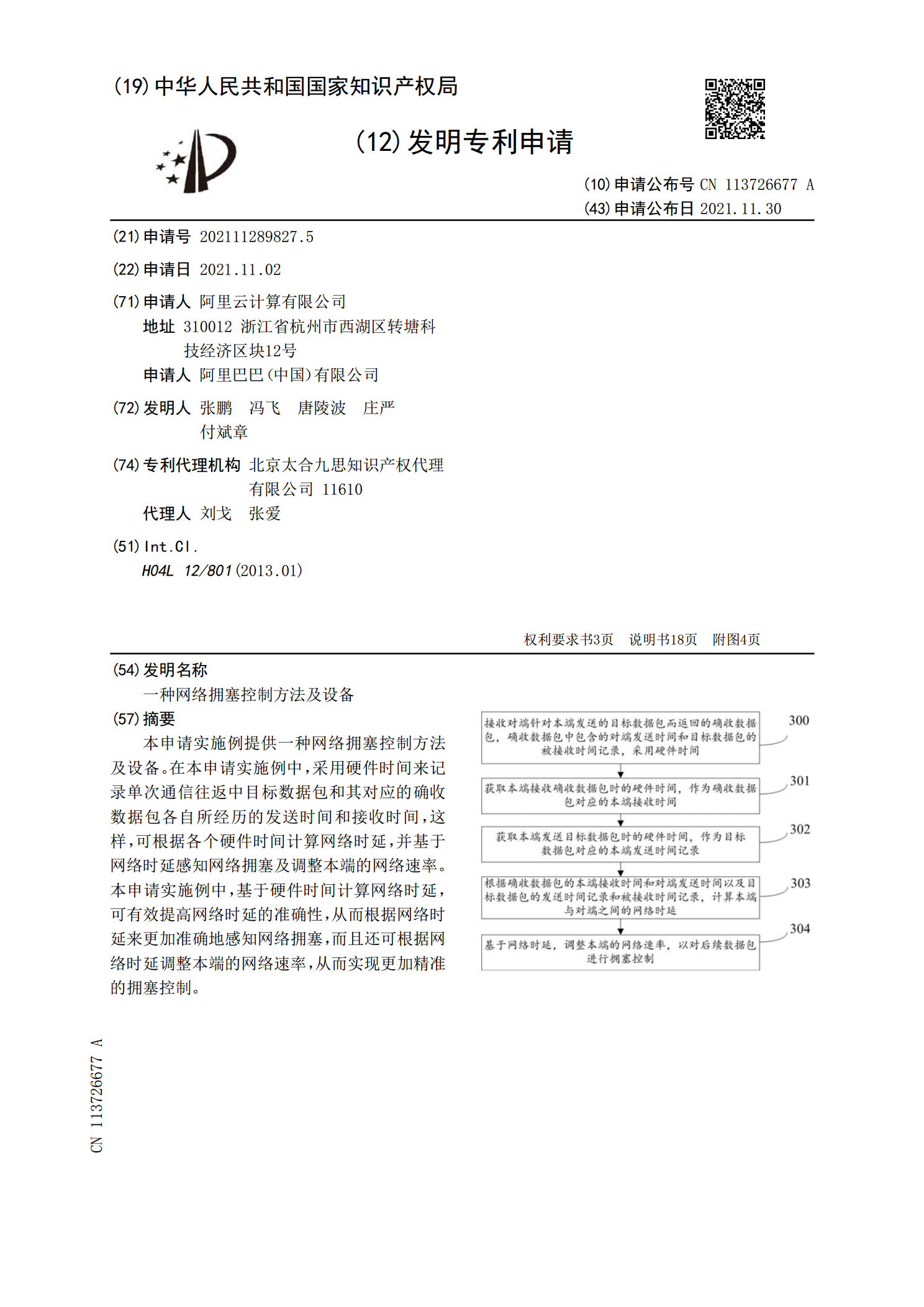
一种网络拥塞控制方法及设备.pdf
本申请实施例提供一种网络拥塞控制方法及设备。在本申请实施例中,采用硬件时间来记录单次通信往返中目标数据包和其对应的确收数据包各自所经历的发送时间和接收时间,这样,可根据各个硬件时间计算网络时延,并基于网络时延感知网络拥塞及调整本端的网络速率。本申请实施例中,基于硬件时间计算网络时延,可有效提高网络时延的准确性,从而根据网络时延来更加准确地感知网络拥塞,而且还可根据网络时延调整本端的网络速率,从而实现更加精准的拥塞控制。

自相似网络传输与拥塞控制的综述报告.docx
自相似网络传输与拥塞控制的综述报告自相似网络传输(Self-SimilarNetworkTraffic)与拥塞控制是计算机网络领域的重要研究方向之一。自相似网络传输是指网络流量具有统计学上的自相似性质,即具有不同时间尺度的分布形式相似的特点。这种特性可能会导致网络出现拥塞的情况,因此设计高效的拥塞控制算法是非常必要的。自相似网络传输的研究始于上世纪90年代初期,由于其在真实网络中的存在性,引起了学术界的广泛关注。自相似性在网络传输中的存在,对传统网络性能分析和建模带来了巨大挑战。因为这种分布模式具有非常不

流媒体传输网络拥塞控制研究.docx
流媒体传输网络拥塞控制研究流媒体传输网络拥塞控制研究摘要:随着互联网的迅猛发展,流媒体成为了人们获取信息和娱乐的重要途径。然而,网络拥塞问题严重影响了流媒体的传输质量和用户体验。本文旨在研究流媒体传输网络的拥塞控制问题,分析流媒体传输中的拥塞原因,并探讨现有的拥塞控制算法和方法,以提出一种有效的解决方案。1.引言随着高速互联网的普及和速度的提升,流媒体作为一种传输音频和视频等媒体内容的技术,得到了广泛的应用。但是,由于网络资源有限和用户数量增加,网络拥塞成为了流媒体传输中的一大问题。网络拥塞会导致传输延迟

自相似网络传输与拥塞控制的开题报告.docx
自相似网络传输与拥塞控制的开题报告一、研究背景与意义随着网络的快速发展和普及,网络传输和拥塞控制技术的研究也越来越受到关注。网络传输技术主要涉及数据在网络中的传输过程,其目的是提高数据传输的速度和可靠性。而拥塞控制技术则是保证网络的公平性和稳定性,通过在发送端和接收端之间协调数据的发送和接收,避免网络拥塞。在网络传输中,自相似性是一种普遍存在的现象,即网络负载的时间序列具有自我相似的结构。因此,自相似网络传输技术得到了广泛的研究和应用。自相似网络传输技术可以根据网络负载的自相似性特征来优化数据的传输过程,