
一种无人机集群的目标搜索控制方法及系统.pdf

悠柔****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机集群的目标搜索控制方法及系统.pdf
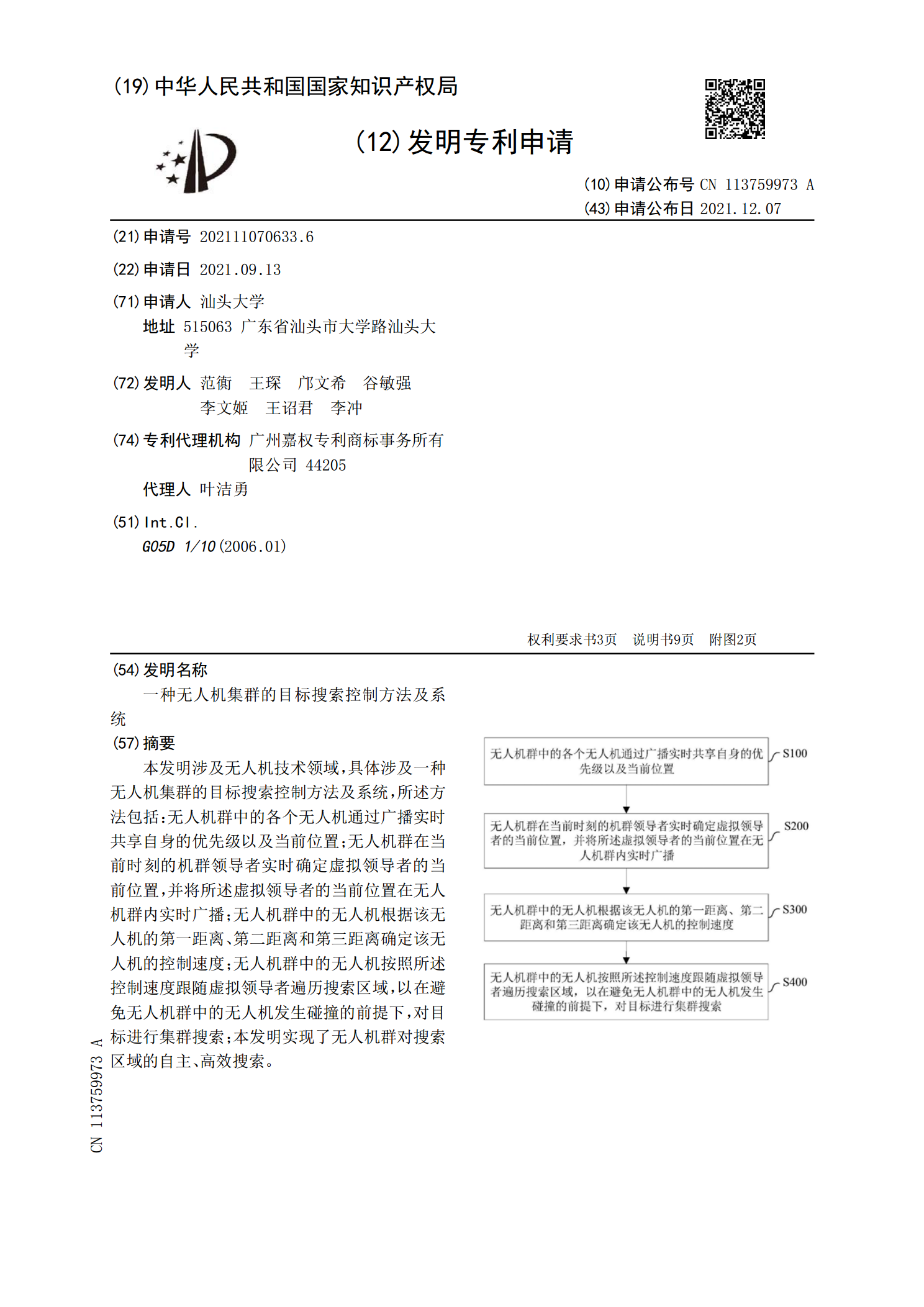
本发明涉及无人机技术领域,具体涉及一种无人机集群的目标搜索控制方法及系统,所述方法包括:无人机群中的各个无人机通过广播实时共享自身的优先级以及当前位置;无人机群在当前时刻的机群领导者实时确定虚拟领导者的当前位置,并将所述虚拟领导者的当前位置在无人机群内实时广播;无人机群中的无人机根据该无人机的第一距离、第二距离和第三距离确定该无人机的控制速度;无人机群中的无人机按照所述控制速度跟随虚拟领导者遍历搜索区域,以在避免无人机群中的无人机发生碰撞的前提下,对目标进行集群搜索;本发明实现了无人机群对搜索区域的自主、

一种无人机动平台目标搜索方法及系统.pdf
本发明涉及一种无人机动平台目标搜索方法及系统,首先以目标隐蔽点定位情况构造搜索目标方向的正态分布,根据正态分布使用导向快速随机路径搜索方法搜索第一规划路径;无人机动平台沿第一规划路径运动过程中若检测到存在狭窄通道,则构建适应狭窄通道的局部地图,并使用启发式A*方法重新进行狭窄通道的第二规划路径的规划,当驶出狭窄通道后切换回第一规划路径,利用两种路径规划方法相结合能够快速到达目标隐蔽点,解决现有的搜索方法存在的搜索效率低的问题。

一种基于飞蛾信息素机制的无人机集群目标搜索方法.pdf
本发明公开一种基于飞蛾信息素机制的无人机集群目标搜索方法,包括:搭建无人机集群典型搜索场景;任务地图网格化,给定无人机初始网格坐标;无人机初始化位置和信息素地图;获取目标位置信息;无人机集群共享位置和目标信息;按飞蛾信息素挥发机制更新信息素地图;按飞蛾信息素传播机制更新信息素地图;无人机按飞蛾信息素分泌机制更新信息素地图;无人机判断当前风势状况;无人机根据局部信息素地图进行运动决策等步骤。本发明基于飞蛾信息素机制,可以实现对动态目标的搜索,具有更高的适应性和灵活性;对于实际作战中的移动目标搜索具有更高的应

基于数字信息素的无人机集群搜索控制方法.docx
基于数字信息素的无人机集群搜索控制方法标题:基于数字信息素的无人机集群搜索控制方法摘要:无人机集群搜索是一种灵活高效的搜索方法,在许多领域,如灾害监测、搜救任务和农业领域中得到了广泛应用。然而,如何有效控制无人机集群的搜索行为仍然是一个具有挑战性的问题。为了解决这个问题,本文提出了一种基于数字信息素的无人机集群搜索控制方法。该方法通过引入信息素的概念,模拟蚁群算法的搜索行为,并结合无人机集群特点,设计了适用于无人机集群搜索的数字信息素模型和控制策略。通过数值模拟实验验证,该方法能够显著提高无人机集群的搜索
共享目标任务信息的无人机集群协同控制系统及控制方法.pdf
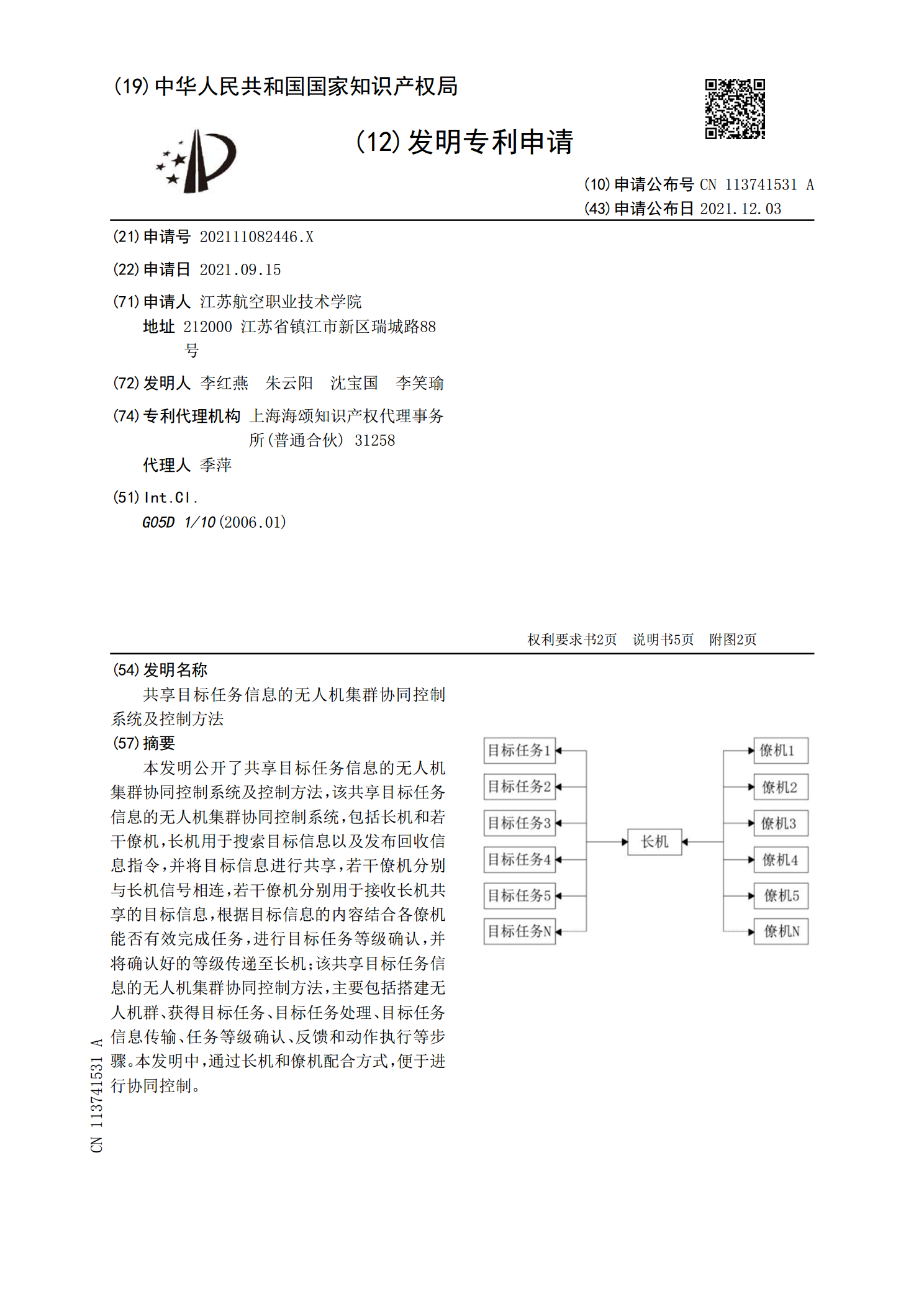
本发明公开了共享目标任务信息的无人机集群协同控制系统及控制方法,该共享目标任务信息的无人机集群协同控制系统,包括长机和若干僚机,长机用于搜索目标信息以及发布回收信息指令,并将目标信息进行共享,若干僚机分别与长机信号相连,若干僚机分别用于接收长机共享的目标信息,根据目标信息的内容结合各僚机能否有效完成任务,进行目标任务等级确认,并将确认好的等级传递至长机;该共享目标任务信息的无人机集群协同控制方法,主要包括搭建无人机群、获得目标任务、目标任务处理、目标任务信息传输、任务等级确认、反馈和动作执行等步骤。本发明