
一种用于餐厅的机器人路径规划方法.pdf

佳宁****么啦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于餐厅的机器人路径规划方法.pdf
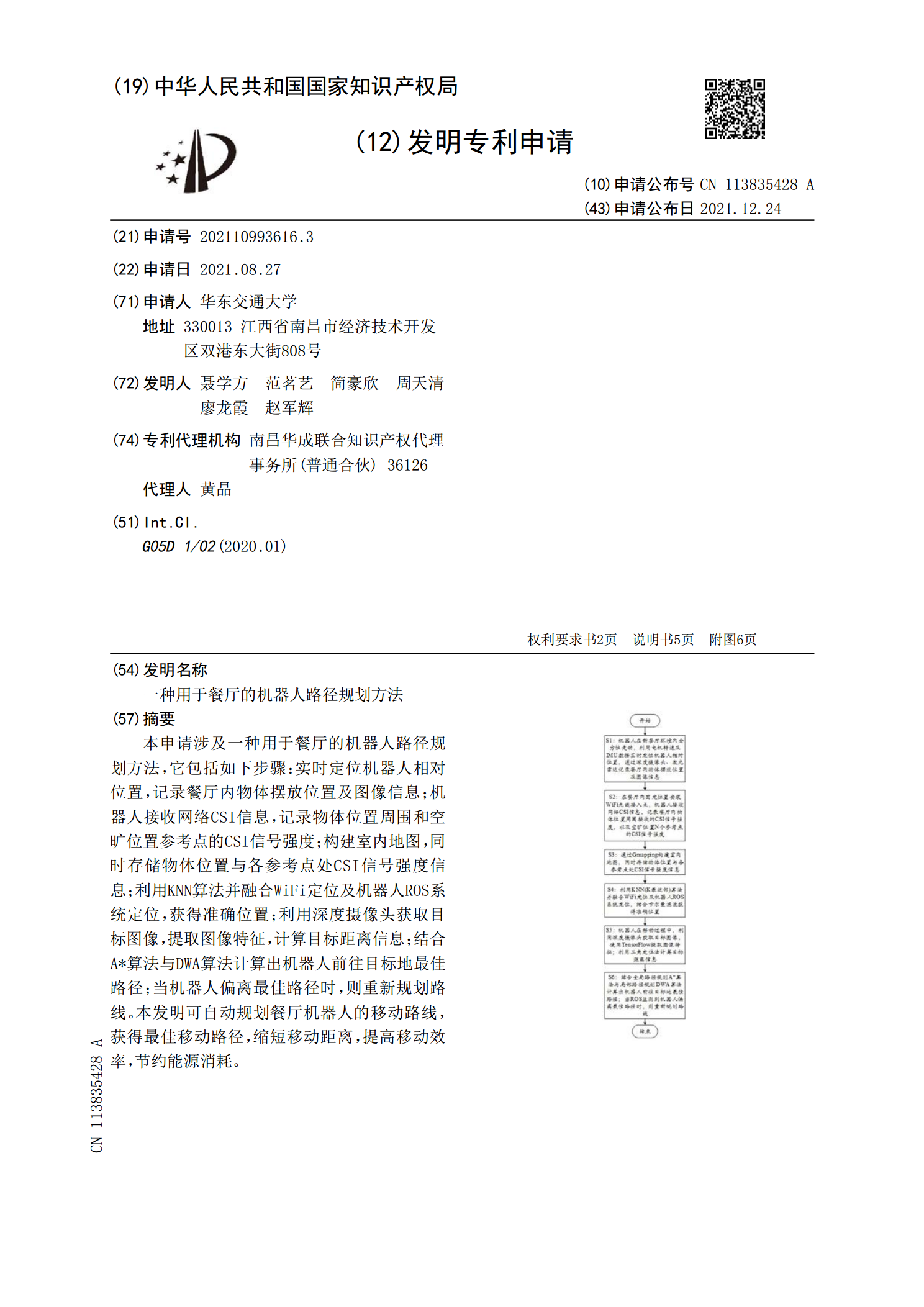
本申请涉及一种用于餐厅的机器人路径规划方法,它包括如下步骤:实时定位机器人相对位置,记录餐厅内物体摆放位置及图像信息;机器人接收网络CSI信息,记录物体位置周围和空旷位置参考点的CSI信号强度;构建室内地图,同时存储物体位置与各参考点处CSI信号强度信息;利用KNN算法并融合WiFi定位及机器人ROS系统定位,获得准确位置;利用深度摄像头获取目标图像,提取图像特征,计算目标距离信息;结合A*算法与DWA算法计算出机器人前往目标地最佳路径;当机器人偏离最佳路径时,则重新规划路线。本发明可自动规划餐厅机器人的

一种用于机器人示教路径的规划方法.pdf
本发明涉及一种用于机器人示教路径的规划方法,其特征在于:所述机器人示教路径的规划方法包括以下几个步骤:1)加载示教路径点的数据;2)根据比较前后点的距离差值和行走方向角差值来过滤点集中的错误点;3)在点集密集处优化并缩减路径点;4)根据每个点到前后固定距离的点之间连线段的夹角的余弦值来提取曲线部分的路径点;5)根据相邻点之间的夹角的余弦值来提取折线部分的路径点;6)提取整个路径点中的起始点和终点;7)保存所有被提取的点。与现有技术相比,此方法提取并简化机器人的行走路径,同时尽可能的保留示教路径的特征,使得

用于机器人路径规划的改进方法.pdf
本发明提供一种用于机器人路径规划的改进方法,包括:步骤一,双向路径规划:分别按照从起始点向目标点和从目标点向起始点的两种方向利用A*算法进行路径规划,保留这两组规划的路径;步骤二,设置并移动关键点:寻找两组规划的路径的交汇点、两组路径上距离障碍物各自最近的点中距离障碍物最远的点,考察该点距离障碍物的距离,若满足大于等于设定距离阈值这个标准,即为关键点;若不满足大于等于设定距离阈值这个标准,则将该点沿规划的路径移动至一个位置点,该位置点距离障碍物的距离刚好等于设定距离阈值,该位置点作为关键点;步骤三,分段规

一种用于移动机器人的路径规划方法和系统.pdf
本发明提出了一种用于移动机器人的路径规划方法和系统,该方法包括采用随机Prim算法生成迷宫地图,并在迷宫地图中生成离散图,并将移动机器人的起点和终点加入离散图中;利用杰斯特拉算法在离散图中搜索,获取移动机器人从起点至终点的最短路径;并对最短路径进行优化得到最优路径作为引导路径;令移动机器人沿引导路径运动,结合场景信息,采用几何方法计算出每一时刻移动机器人应该采取的最佳动作和运行路线。基于该方法,本发明还提出了一种用于移动机器人的路径规划系统,分析移动机器人在不同情况下应采取的最佳决策,避免移动机器人在运动

一种应用于跨异构多层空间的轮式机器人路径规划方法.pdf
一种应用于跨异构多层空间的轮式机器人路径规划方法,本发明涉及多层空间的移动机器人路径规划方法。本发明的目的是为了解决路径规划算法无法获得准确的多层空间的机器人路径规划的问题。一种应用于跨异构多层空间的轮式机器人路径规划方法具体过程为:步骤1、构建多层空间的地图网络;步骤2、基于多层空间的地图网络对地图网络中的路径进行搜索。本发明用于机器人建图与导航算法与技术领域。