
基于空间正则化相关滤波器的自适应多特征融合跟踪方法.pdf

桂香****盟主

1/10
2/10

3/10
4/10
5/10

6/10
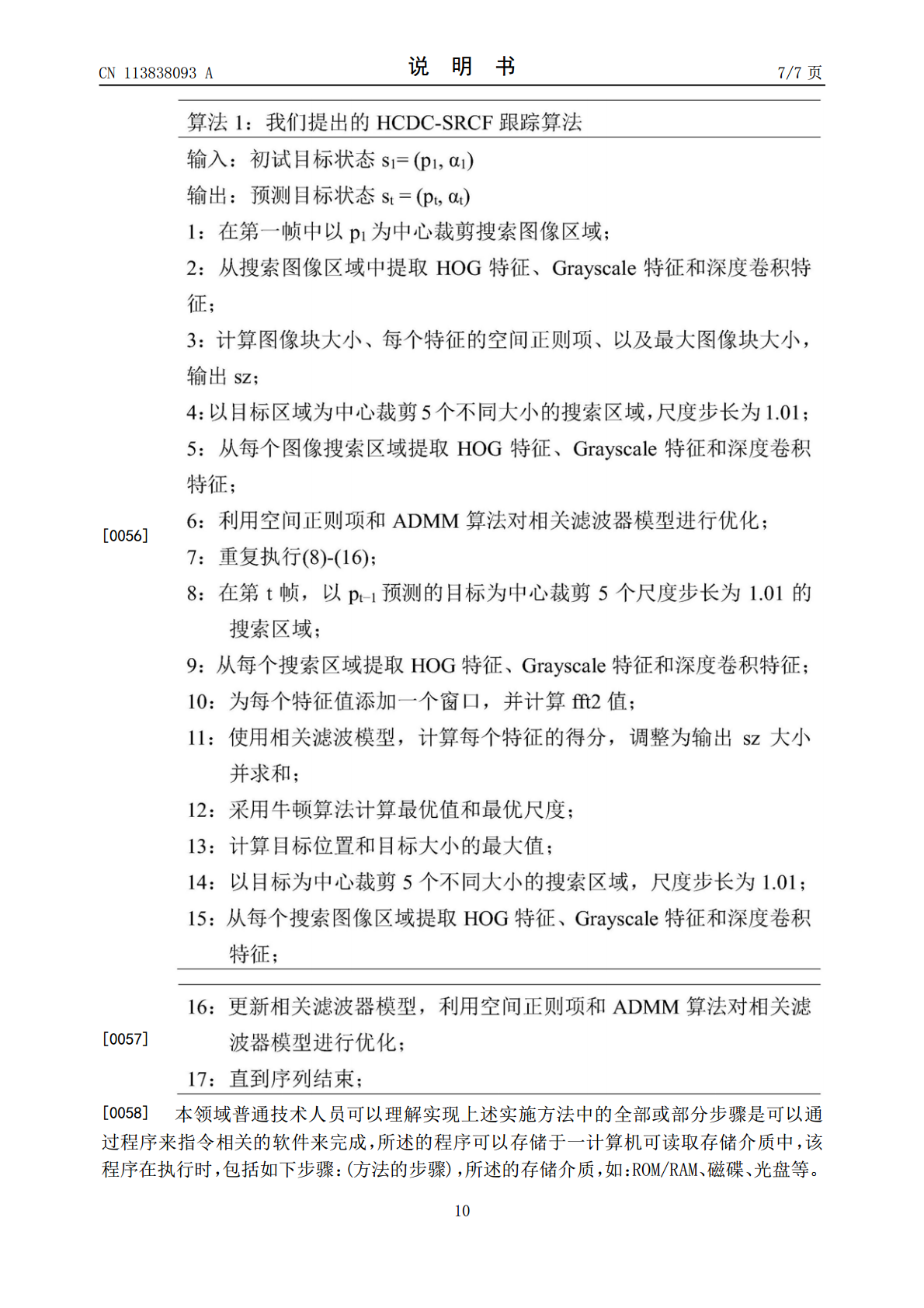
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于空间正则化相关滤波器的自适应多特征融合跟踪方法.pdf
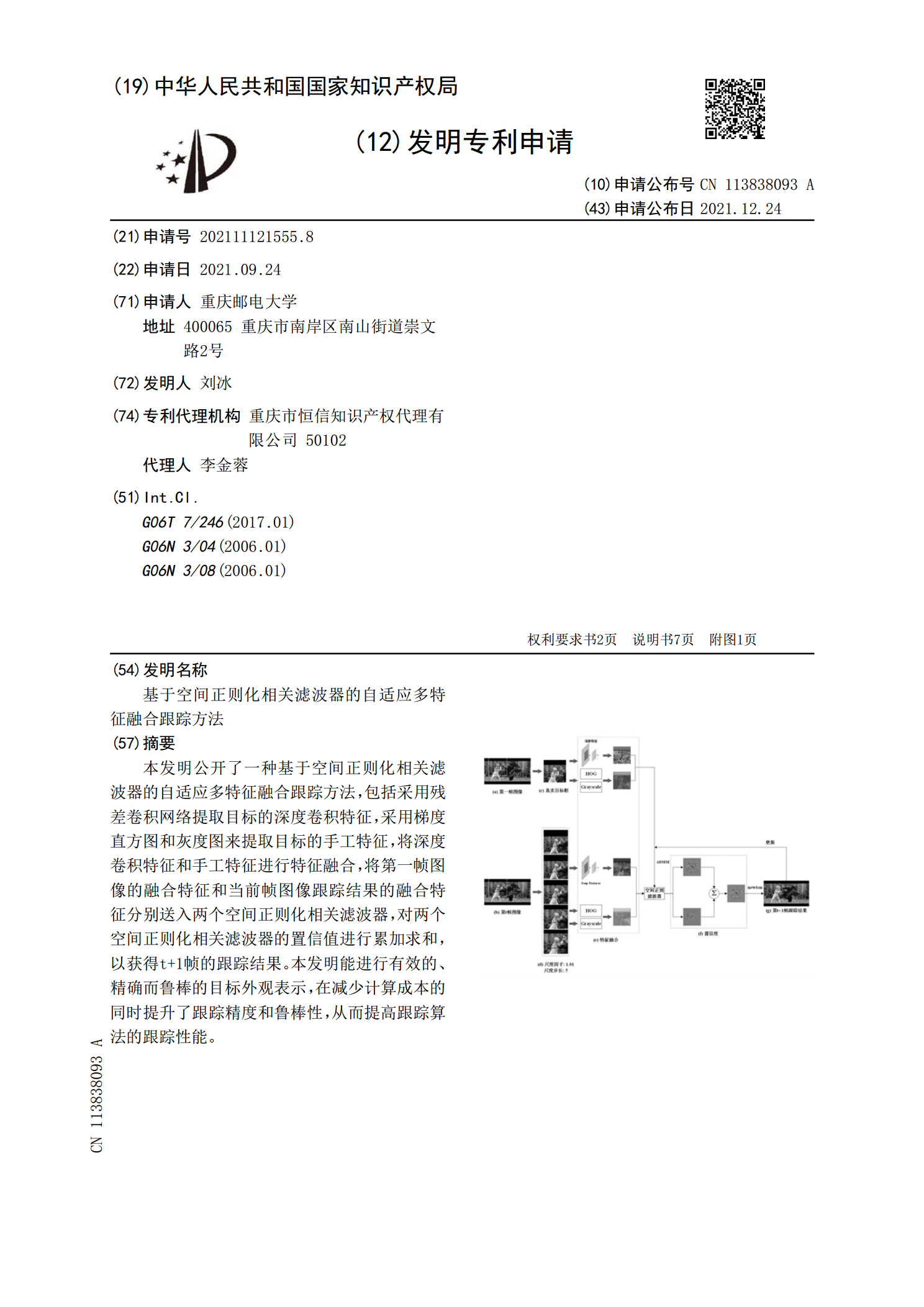
本发明公开了一种基于空间正则化相关滤波器的自适应多特征融合跟踪方法,包括采用残差卷积网络提取目标的深度卷积特征,采用梯度直方图和灰度图来提取目标的手工特征,将深度卷积特征和手工特征进行特征融合,将第一帧图像的融合特征和当前帧图像跟踪结果的融合特征分别送入两个空间正则化相关滤波器,对两个空间正则化相关滤波器的置信值进行累加求和,以获得t+1帧的跟踪结果。本发明能进行有效的、精确而鲁棒的目标外观表示,在减少计算成本的同时提升了跟踪精度和鲁棒性,从而提高跟踪算法的跟踪性能。
基于空间正则化约束的支持向量相关滤波器目标跟踪方法.pptx
汇报人:CONTENTSPARTONEPARTTWO空间正则化约束的定义空间正则化约束在目标跟踪中的重要性空间正则化约束的实现方式PARTTHREE支持向量相关滤波器的原理支持向量相关滤波器的优势支持向量相关滤波器的应用场景PARTFOUR目标跟踪方法的分类基于滤波器的方法与基于机器学习的方法比较目标跟踪方法的评价标准PARTFIVE方法原理方法实现流程方法优缺点分析方法改进方向PARTSIX实验设置与数据集实验结果展示结果分析实验结论汇报人:

基于自适应空间正则化和畸变抑制的相关滤波跟踪.pptx
,目录PartOnePartTwo算法概述算法原理算法优缺点算法改进方向PartThree空间正则化概述自适应空间正则化原理自适应空间正则化在跟踪算法中的应用自适应空间正则化效果评估PartFour畸变概述畸变产生原因畸变抑制方法畸变抑制在跟踪算法中的应用PartFive算法流程关键技术实现实验结果分析与其他算法的比较PartSix应用场景算法局限性未来研究方向THANKS

基于改进空间正则化相关滤波器的运动目标跟踪研究.docx
基于改进空间正则化相关滤波器的运动目标跟踪研究基于改进空间正则化相关滤波器的运动目标跟踪研究摘要:目标跟踪是计算机视觉领域的重要研究方向之一,在许多应用中具有广泛的应用价值。然而,由于光照变化、目标形态变化和背景干扰等因素的影响,目标跟踪仍然是一个具有挑战性的问题。为了克服这些问题,本文提出了一种基于改进空间正则化相关滤波器的运动目标跟踪方法。首先,本文介绍了传统的空间正则化相关滤波器(SRDCF)方法的原理和流程。SRDCF方法通过在线学习目标的外观模型并建立相关滤波器来进行目标跟踪。然而,传统的SRD

基于多准则特征融合的自适应跟踪算法.docx
基于多准则特征融合的自适应跟踪算法基于多准则特征融合的自适应跟踪算法摘要:在计算机视觉和机器学习领域,物体跟踪一直是一个热门的研究方向。然而,由于目标的外观变化、背景干扰和姿态变化等因素的影响,传统的跟踪算法往往难以取得令人满意的跟踪效果。针对这一问题,本文提出一种基于多准则特征融合的自适应跟踪算法。关键词:物体跟踪,自适应跟踪,多准则特征融合。1.引言物体跟踪是计算机视觉领域的一个重要问题,其在许多应用领域中都具有广泛的应用,如视频监控、交通管理、智能驾驶等。然而,由于目标的外观变化、背景干扰和姿态变化