
一种基于FMCW毫米波雷达的多尺度特征融合手势识别方法.pdf

康平****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于FMCW毫米波雷达的多尺度特征融合手势识别方法.pdf
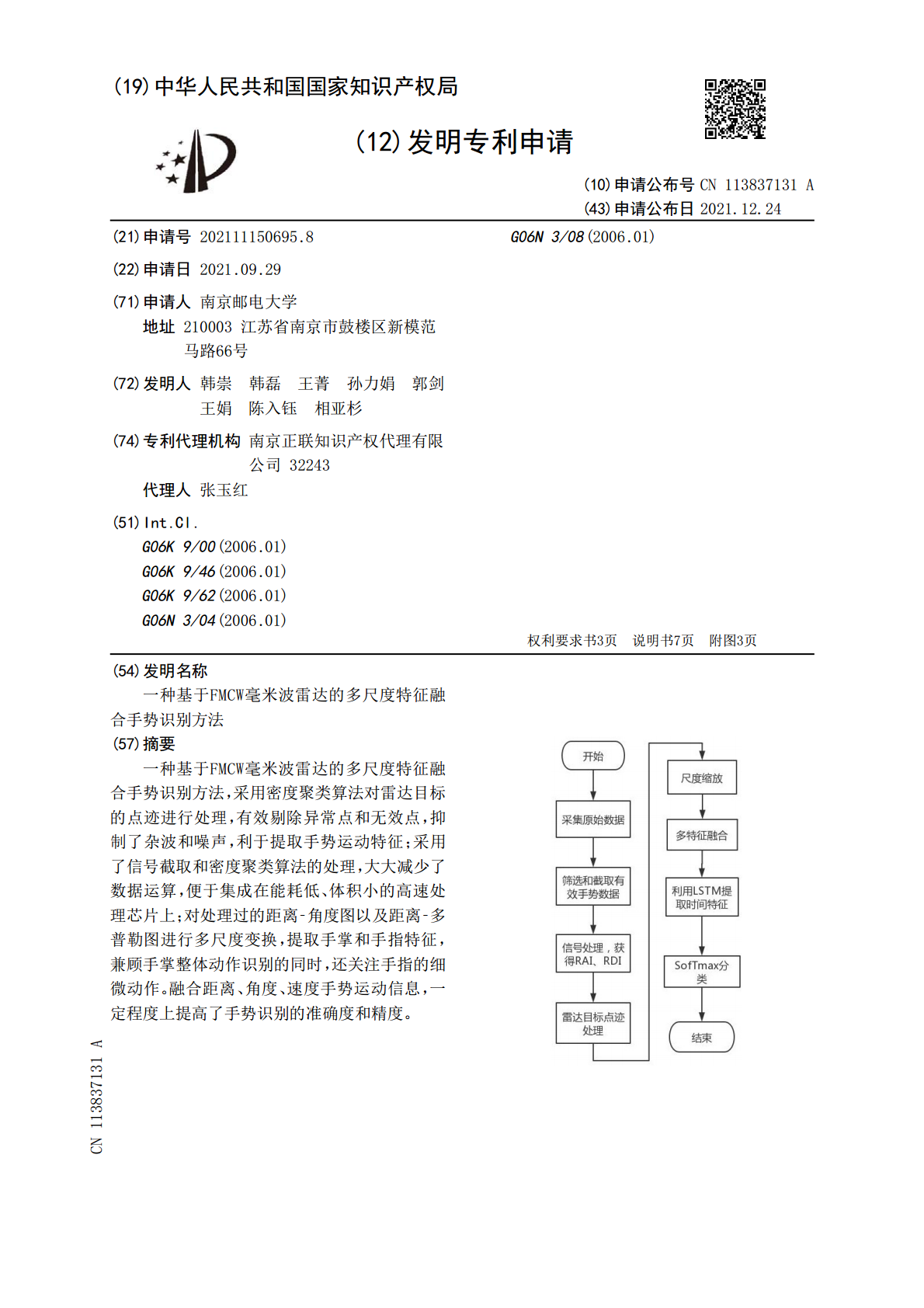
一种基于FMCW毫米波雷达的多尺度特征融合手势识别方法,采用密度聚类算法对雷达目标的点迹进行处理,有效剔除异常点和无效点,抑制了杂波和噪声,利于提取手势运动特征;采用了信号截取和密度聚类算法的处理,大大减少了数据运算,便于集成在能耗低、体积小的高速处理芯片上;对处理过的距离‑角度图以及距离‑多普勒图进行多尺度变换,提取手掌和手指特征,兼顾手掌整体动作识别的同时,还关注手指的细微动作。融合距离、角度、速度手势运动信息,一定程度上提高了手势识别的准确度和精度。

一种基于FMCW雷达的三参数特征融合手势识别方法.pdf
本发明提出了一种基于FMCW(frequencymodulatedcontinuouswave)雷达的三参数特征融合手势识别方法。首先通过雷达获取不同手势的中频信号,从中得到角度参数、距离参数和多普勒频移参数,并构造对应数据集;其次,将关于角度、距离和多普勒频移的数据集分别送入卷积神经网络中训练,得到特征值并做融合处理;最后,将融合后的特征值送入分类器,得到手势类别。本发明创新地提出多重参数在卷积神经网络中的融合方法,解决了传统识别算法使用条件受限的问题,且最终手势的分类效果优于单一参数。

基于FMCW雷达的双流融合神经网络手势识别方法.docx
基于FMCW雷达的双流融合神经网络手势识别方法基于FMCW雷达的双流融合神经网络手势识别方法摘要:手势识别已经成为人机交互中重要的研究方向之一。本文提出了一种基于FMCW(频率调制连续波)雷达的双流融合神经网络手势识别方法。该方法将FMCW雷达的距离和速度信息提取出来,并结合两个神经网络,一个用于距离信息处理,另一个用于速度信息处理。实验结果表明,该方法可以实现高精度的手势识别。1.引言手势识别技术是一种通过识别人体动作和手势来实现人机交互的技术。在虚拟现实、智能家居和智能医疗等领域中得到了广泛的应用。传

基于FMCW毫米波雷达的手势识别方法研究与实现的开题报告.docx
基于FMCW毫米波雷达的手势识别方法研究与实现的开题报告一、选题背景随着智能家居、智能手机等智能化产品的普及,利用手势进行交互已经成为了一种新的方式。这种方式不仅可以提高用户的使用效率和体验感,还可以避免传统输入方式的疲劳感和输入错误等问题。因此,手势识别技术的研究与实现已经成为了目前智能化应用领域的热点问题。基于FMCW毫米波雷达的手势识别方法具有探测范围大、分辨率高、不受光照和遮挡等干扰的优点,因此,本文选择基于FMCW毫米波雷达进行手势识别的研究与实现。二、研究内容与目标本文的研究内容主要包括:1.

基于FMCW雷达的动态手势识别方法研究.docx
基于FMCW雷达的动态手势识别方法研究摘要:随着智能技术的快速发展,手势识别作为一种自然、直观的人机交互方式,受到了广泛关注。基于FMCW雷达的手势识别系统具有快速响应、无触摸、适应多种环境等优势。本文基于FMCW雷达,研究并提出一种动态手势识别方法。首先,介绍了FMCW雷达的原理和特点。然后,详细描述了手势识别流程,包括数据采集、预处理、特征提取和分类器设计等步骤。最后,通过实验验证了该方法的有效性和可行性。关键词:FMCW雷达、动态手势识别、特征提取、分类器设计1.引言手势识别技术是一种通过分析人体动