
一种基于边缘计算的目标动态跟踪方法及系统.pdf

盼易****君a


1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于边缘计算的目标动态跟踪方法及系统.pdf
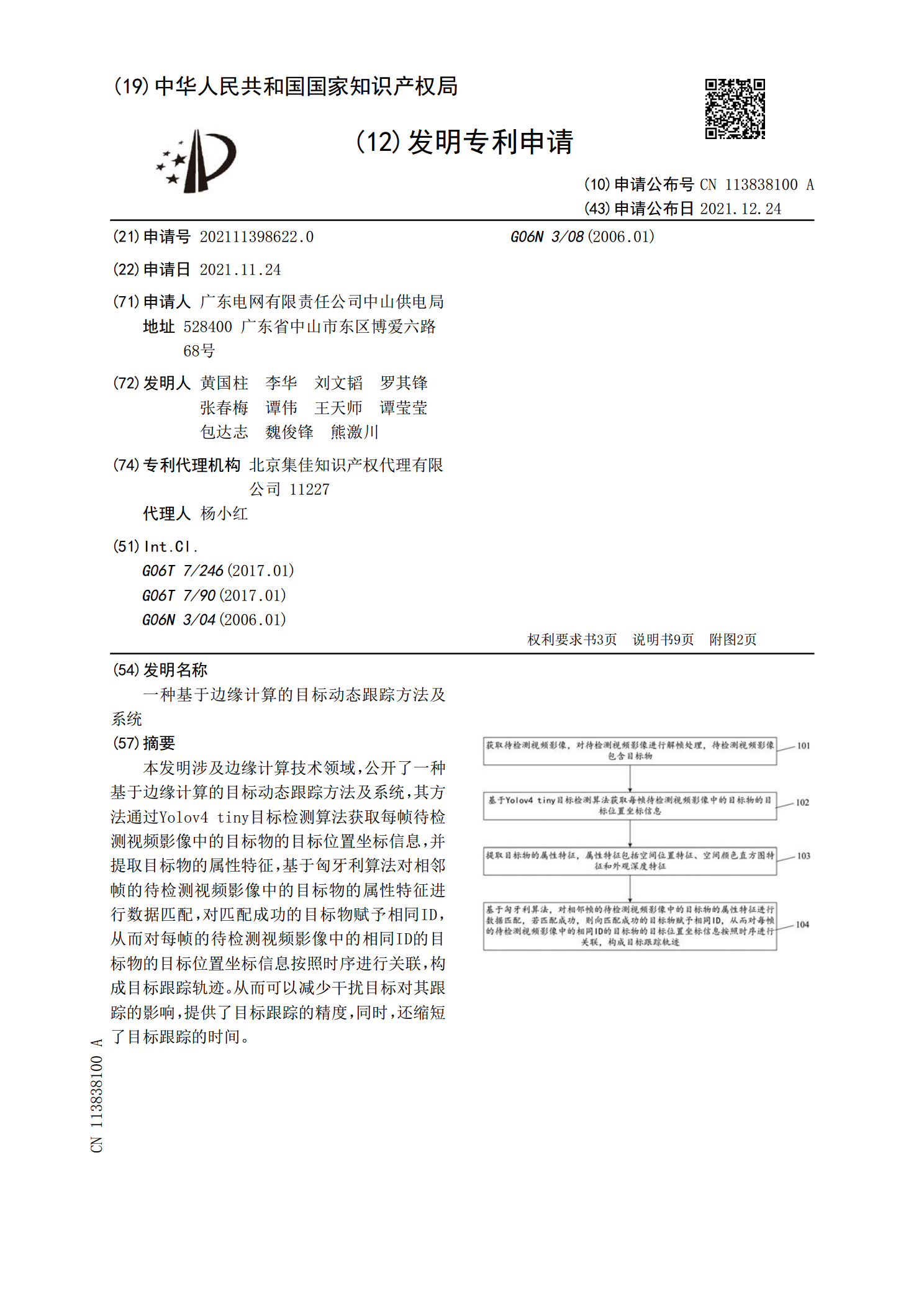
本发明涉及边缘计算技术领域,公开了一种基于边缘计算的目标动态跟踪方法及系统,其方法通过Yolov4tiny目标检测算法获取每帧待检测视频影像中的目标物的目标位置坐标信息,并提取目标物的属性特征,基于匈牙利算法对相邻帧的待检测视频影像中的目标物的属性特征进行数据匹配,对匹配成功的目标物赋予相同ID,从而对每帧的待检测视频影像中的相同ID的目标物的目标位置坐标信息按照时序进行关联,构成目标跟踪轨迹。从而可以减少干扰目标对其跟踪的影响,提供了目标跟踪的精度,同时,还缩短了目标跟踪的时间。
一种基于边缘计算的视频目标跟踪方法.pdf
本发明为一种基于边缘计算的视频目标跟踪方法,公开了一种基于边缘计算的视频接力跟踪方法及系统,属于视频追踪技术领域,包括以下步骤:S1:选定目标并获取其深度特征;S2:训练深度神经网络并植入边缘计算系统;S3:保存图像并记录图像及拍摄设备信息;S4:进行IoU匹配和特征相似性度量;S5:目标跟踪接力。本发明利用边缘计算实时性强的特点,降低对云中心的计算、存储和网络带宽的需求,提高视频分析的速度;结合卡尔曼滤波和深度学习技术对视频目标进行预测和跟踪,可以解决解决视频目标跟踪中需要人员值守和进行筛选等费时费力的
基于直线边缘特征的目标跟踪方法、系统.pdf
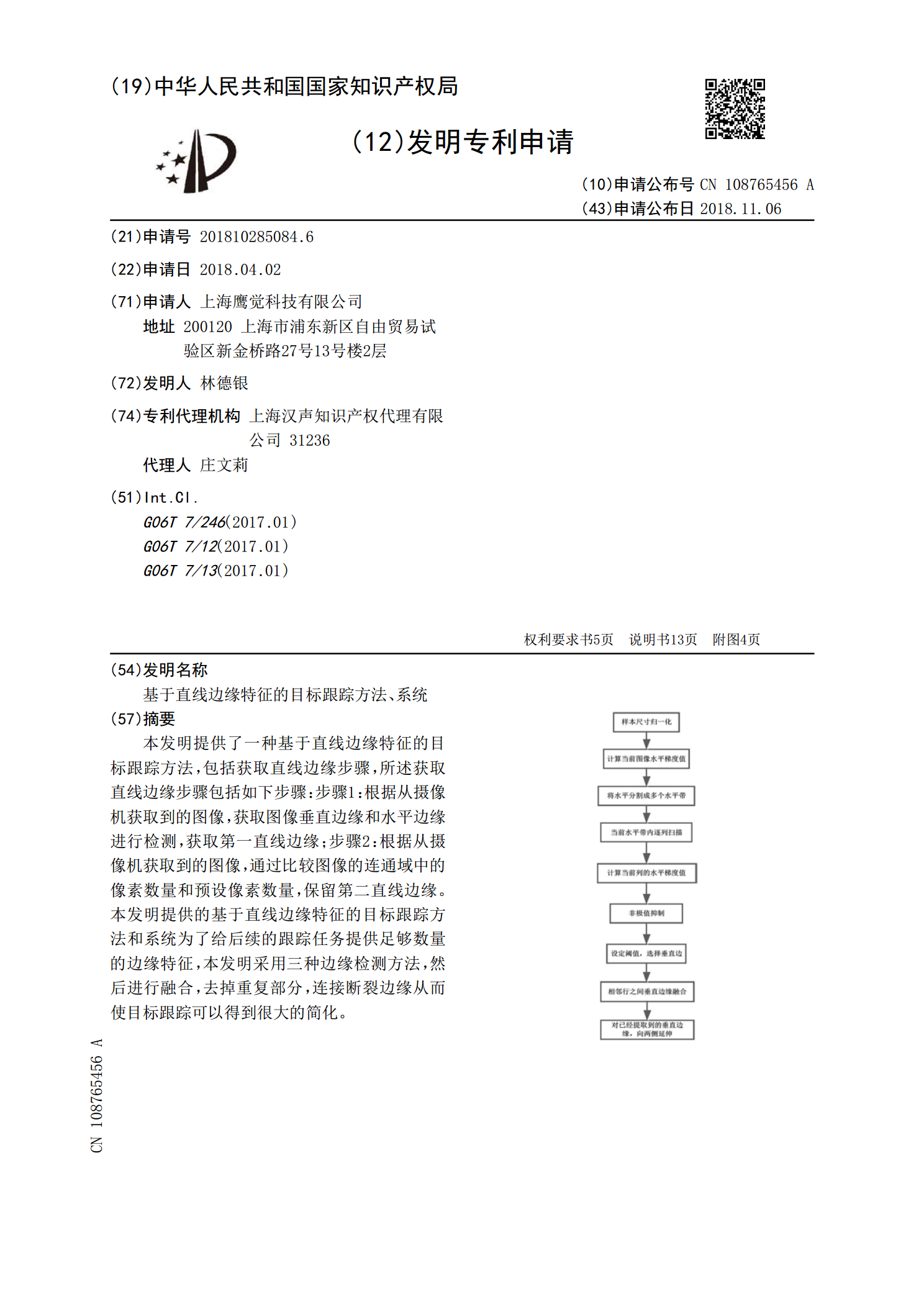
本发明提供了一种基于直线边缘特征的目标跟踪方法,包括获取直线边缘步骤,所述获取直线边缘步骤包括如下步骤:步骤1:根据从摄像机获取到的图像,获取图像垂直边缘和水平边缘进行检测,获取第一直线边缘;步骤2:根据从摄像机获取到的图像,通过比较图像的连通域中的像素数量和预设像素数量,保留第二直线边缘。本发明提供的基于直线边缘特征的目标跟踪方法和系统为了给后续的跟踪任务提供足够数量的边缘特征,本发明采用三种边缘检测方法,然后进行融合,去掉重复部分,连接断裂边缘从而使目标跟踪可以得到很大的简化。
一种基于动态语义特征的目标跟踪方法及系统.pdf
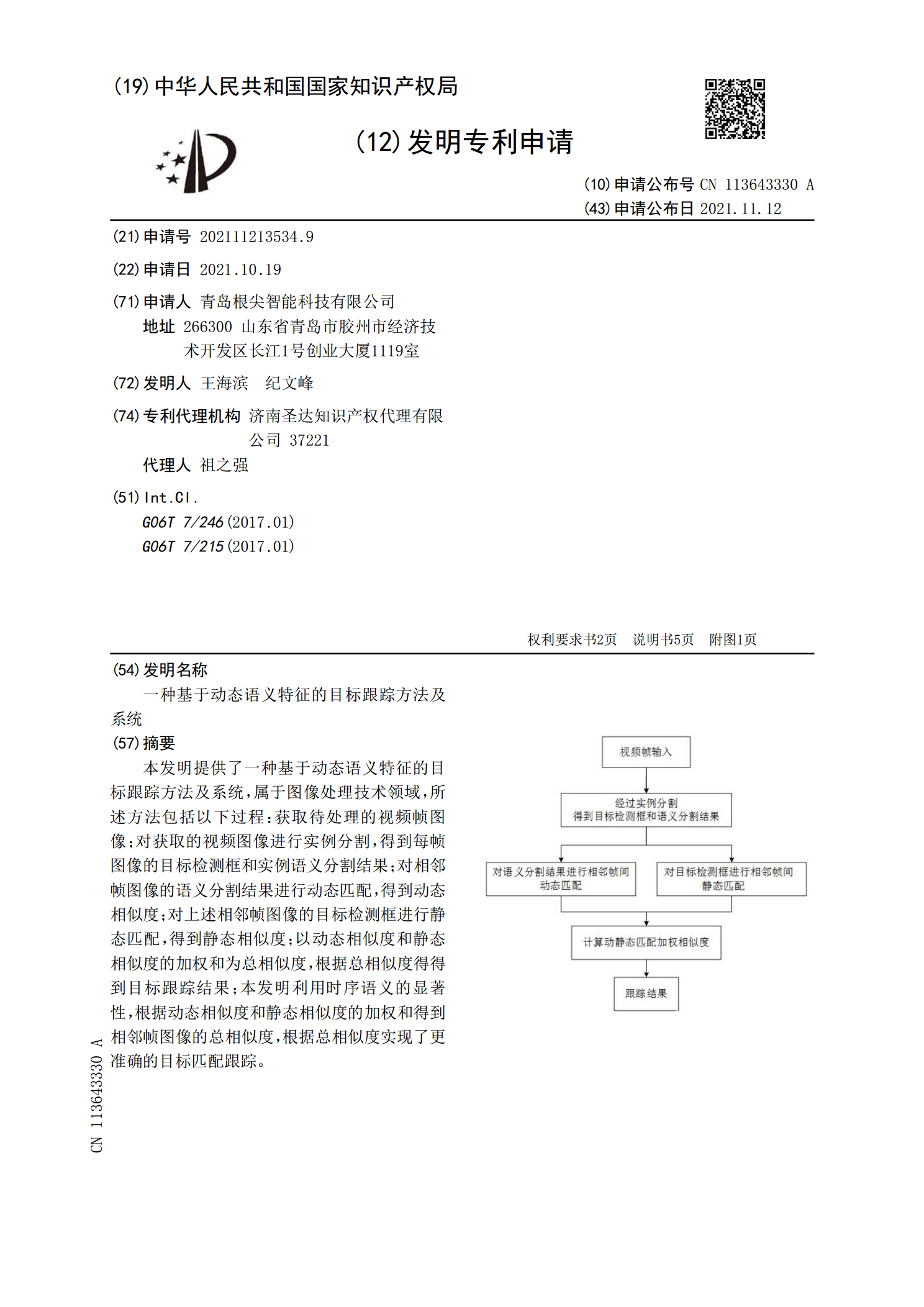
本发明提供了一种基于动态语义特征的目标跟踪方法及系统,属于图像处理技术领域,所述方法包括以下过程:获取待处理的视频帧图像;对获取的视频图像进行实例分割,得到每帧图像的目标检测框和实例语义分割结果;对相邻帧图像的语义分割结果进行动态匹配,得到动态相似度;对上述相邻帧图像的目标检测框进行静态匹配,得到静态相似度;以动态相似度和静态相似度的加权和为总相似度,根据总相似度得得到目标跟踪结果;本发明利用时序语义的显著性,根据动态相似度和静态相似度的加权和得到相邻帧图像的总相似度,根据总相似度实现了更准确的目标匹配跟

基于边缘计算的动态智能交通诱导系统设计.pptx
基于边缘计算的动态智能交通诱导系统设计目录添加章节标题边缘计算技术边缘计算技术的概念边缘计算技术在智能交通诱导系统中的应用边缘计算技术的优势动态智能交通诱导系统设计动态智能交通诱导系统的需求分析系统架构设计系统功能模块设计系统性能指标基于边缘计算的动态智能交通诱导系统实现数据采集与处理边缘计算平台搭建诱导策略制定与优化系统测试与验证系统优势与效益分析系统优势分析系统效益分析对交通行业的推动作用未来发展与挑战基于边缘计算的智能交通诱导系统的发展趋势面临的挑战与问题未来发展方向与策略THANKYOU