
一种隧道断面收敛变形的自动化监测系统及其方法.pdf

和裕****az


1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种隧道断面收敛变形的自动化监测系统及其方法.pdf
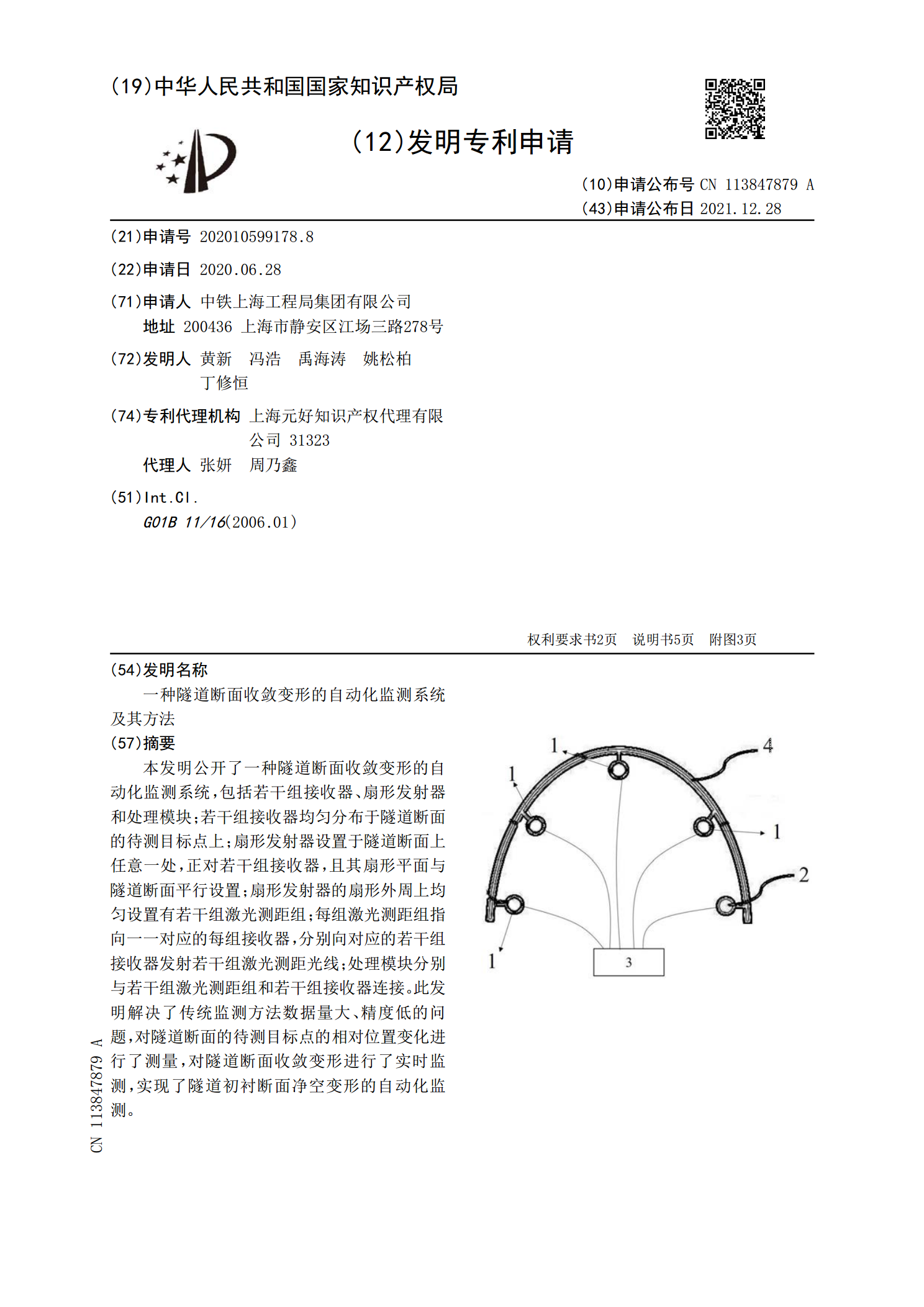
本发明公开了一种隧道断面收敛变形的自动化监测系统,包括若干组接收器、扇形发射器和处理模块;若干组接收器均匀分布于隧道断面的待测目标点上;扇形发射器设置于隧道断面上任意一处,正对若干组接收器,且其扇形平面与隧道断面平行设置;扇形发射器的扇形外周上均匀设置有若干组激光测距组;每组激光测距组指向一一对应的每组接收器,分别向对应的若干组接收器发射若干组激光测距光线;处理模块分别与若干组激光测距组和若干组接收器连接。此发明解决了传统监测方法数据量大、精度低的问题,对隧道断面的待测目标点的相对位置变化进行了测量,对隧
地铁隧道收敛变形监测.doc
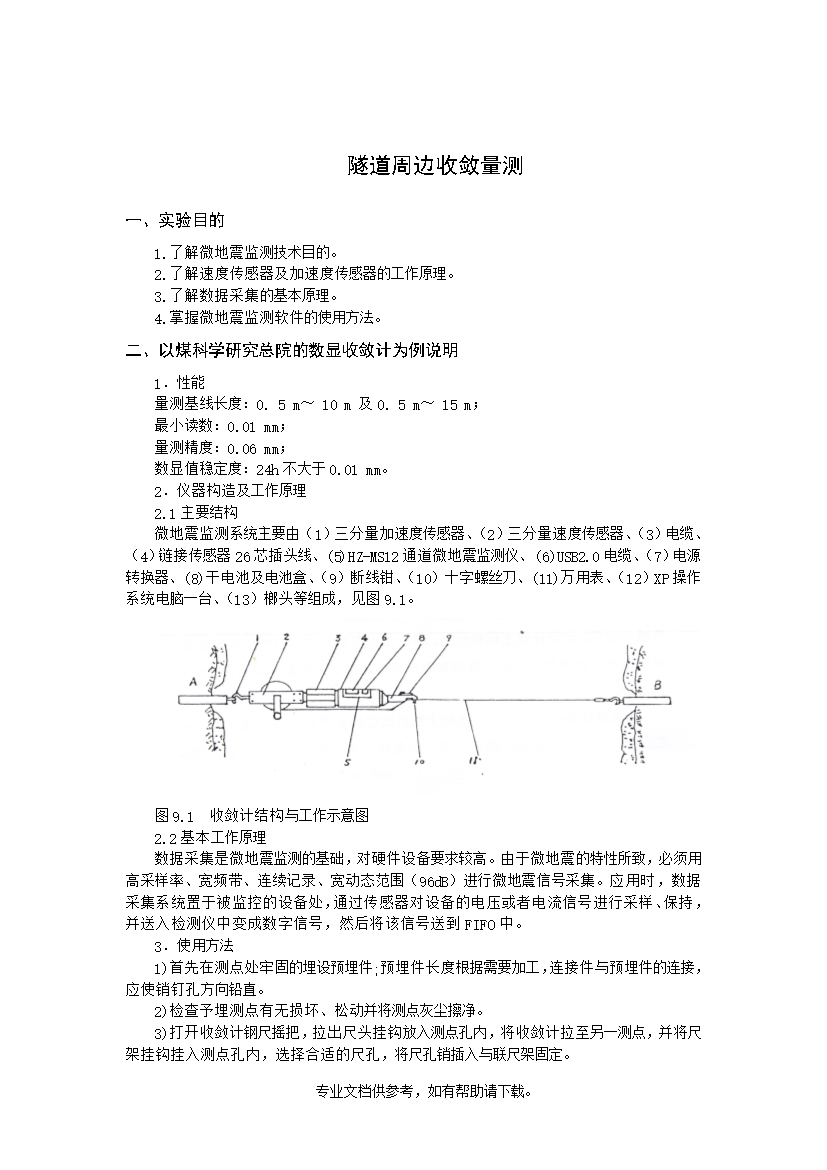
专业文档供参考,如有帮助请下载。专业文档供参考,如有帮助请下载。专业文档供参考,如有帮助请下载。隧道周边收敛量测一、实验目的1.了解微地震监测技术目的。2.了解速度传感器及加速度传感器的工作原理。3.了解数据采集的基本原理。4.掌握微地震监测软件的使用方法。二、以煤科学研究总院的数显收敛计为例说明1.性能量测基线长度:0.5m~10m及0.5m~15m;最小读数:0.01mm;量测精度:0.06mm;数显值稳定度:24h不大于0.01mm。2.仪器构造及工作原理2.1主要结构微地震监测系统主要由(1)三分

地铁隧道收敛变形监测.docx
隧道周边收敛量测一、实验目的1.了解微地震监测技术目的。2.了解速度传感器及加速度传感器的工作原理。3.了解数据采集的基本原理。4.掌握微地震监测软件的使用方法。二、以煤科学研究总院的数显收敛计为例说明1.性能量测基线长度:0.5m~10m及0.5m~15m;最小读数:0.01mm;量测精度:0.06mm;数显值稳定度:24h不大于0.01mm。2.仪器构造及工作原理2.1主要结构微地震监测系统主要由(1)三分量加速度传感器、(2)三分量速度传感器、(3)电缆、(4)链接传感器26芯插头线、(5)HZ-M
一种盾构隧道扭转变形监测系统及其方法.pdf
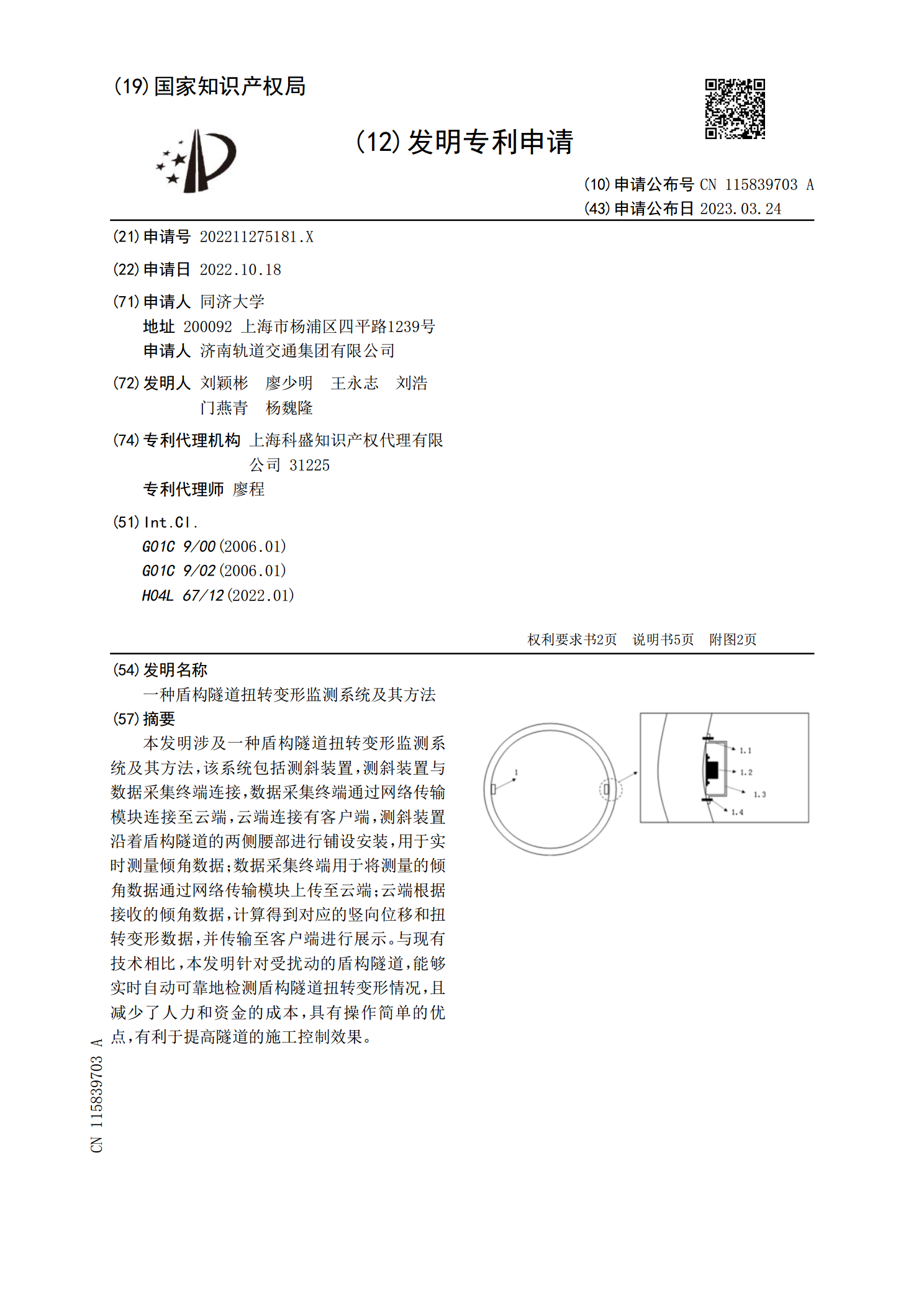
本发明涉及一种盾构隧道扭转变形监测系统及其方法,该系统包括测斜装置,测斜装置与数据采集终端连接,数据采集终端通过网络传输模块连接至云端,云端连接有客户端,测斜装置沿着盾构隧道的两侧腰部进行铺设安装,用于实时测量倾角数据;数据采集终端用于将测量的倾角数据通过网络传输模块上传至云端;云端根据接收的倾角数据,计算得到对应的竖向位移和扭转变形数据,并传输至客户端进行展示。与现有技术相比,本发明针对受扰动的盾构隧道,能够实时自动可靠地检测盾构隧道扭转变形情况,且减少了人力和资金的成本,具有操作简单的优点,有利于提高

倾斜摄影测量的隧道断面变形监测方法研究.docx
倾斜摄影测量的隧道断面变形监测方法研究摘要:斜摄影测量是一种有效的隧道变形监测方法,可以实现隧道断面的快速、准确的三维测量和变形监测。本文基于斜摄影测量技术,研究了一种基于三维点云的隧道断面变形监测方法,详细介绍了该方法的实现过程和应用效果。通过实际应用发现,该方法能够快速、准确地测量隧道断面的变形情况,为隧道施工和维护提供了有效的技术支持。关键词:斜摄影测量,三维点云,隧道断面,变形监测一、引言隧道工程是地下工程中的重要分支,具有很大的经济和社会效益。在隧道施工和运营过程中,隧道断面的变形问题是一个重要