
一种丝线张力检测方法、控制方法及控制装置.pdf

雨巷****凝海

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种丝线张力检测方法、控制方法及控制装置.pdf
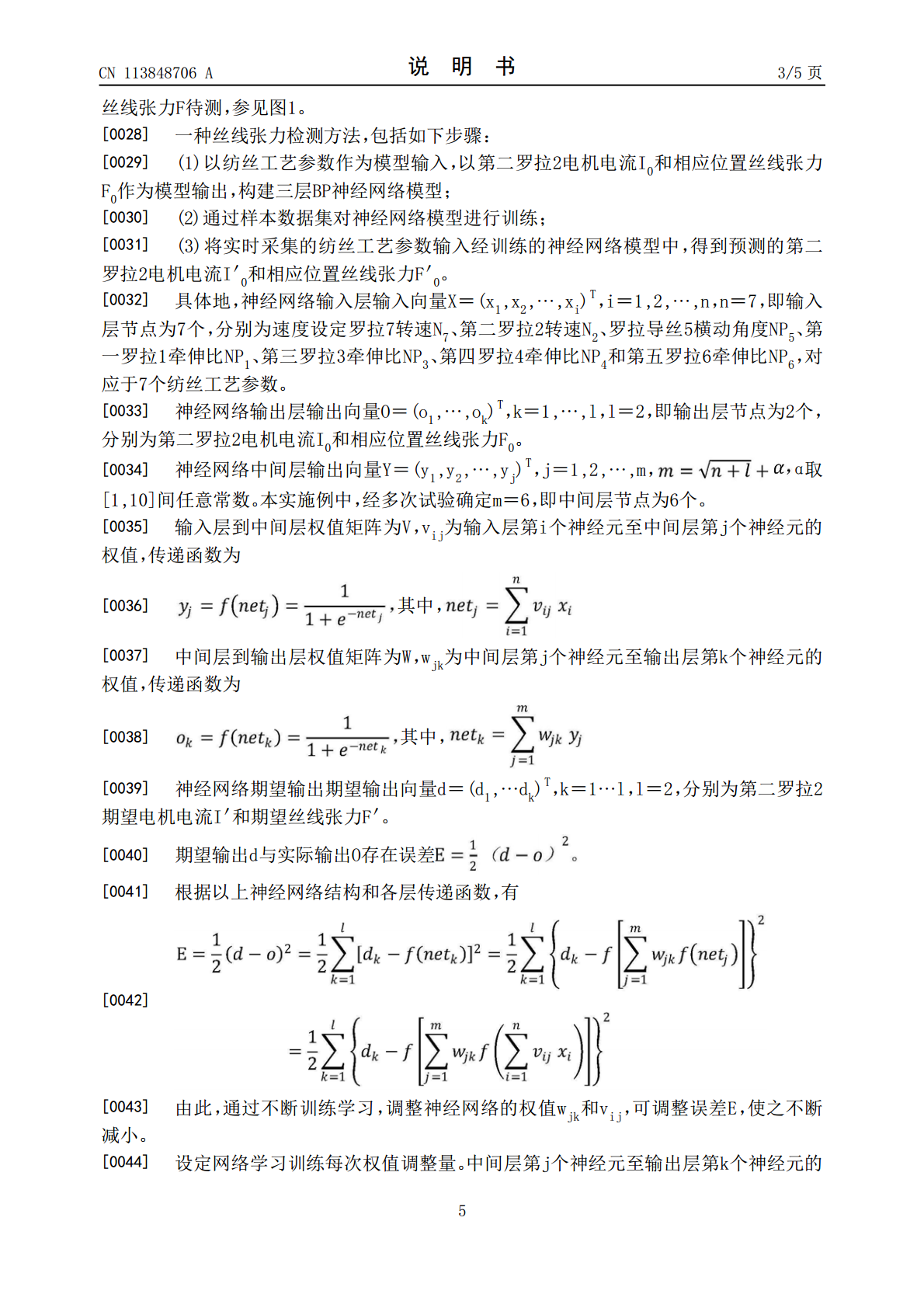
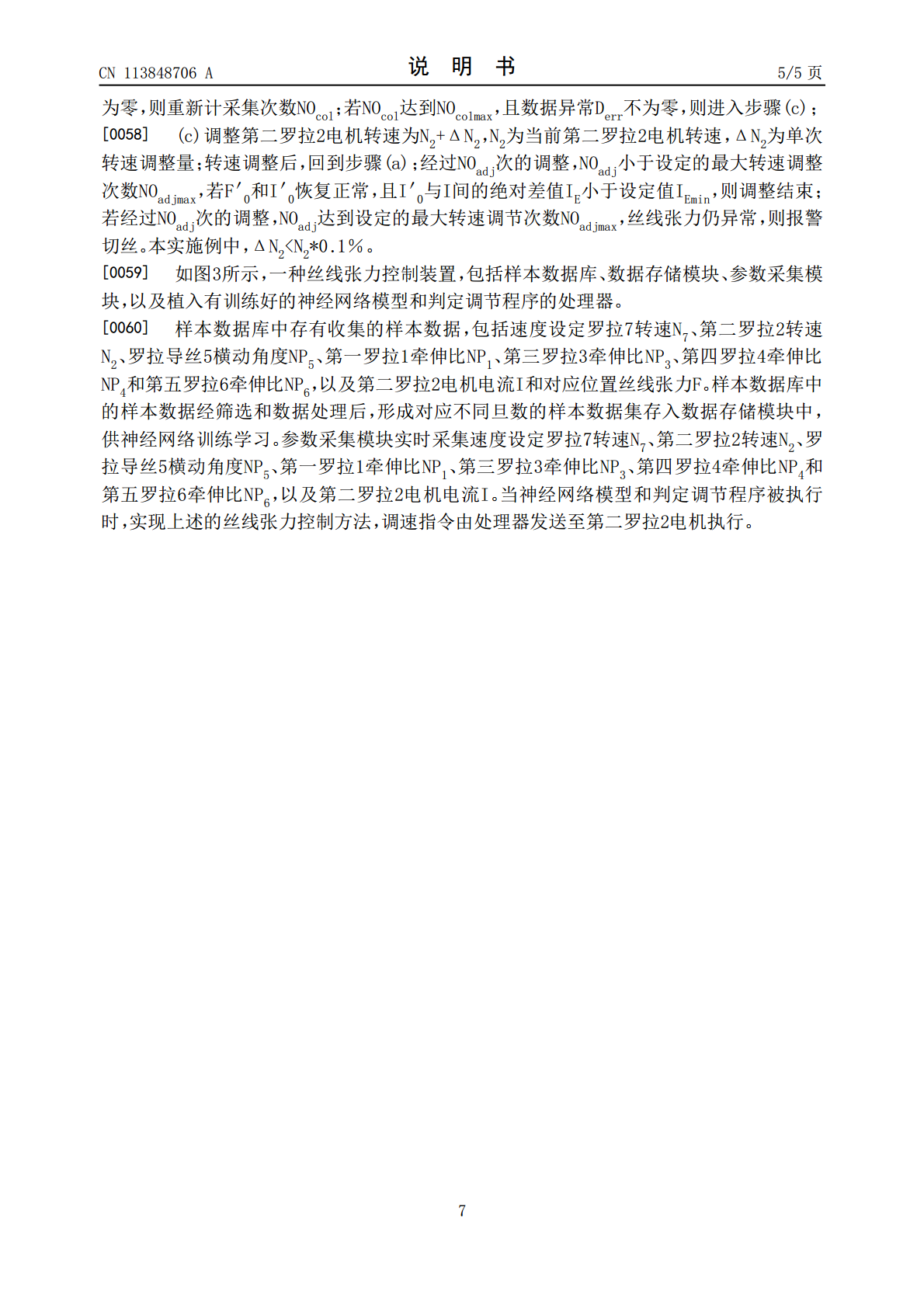
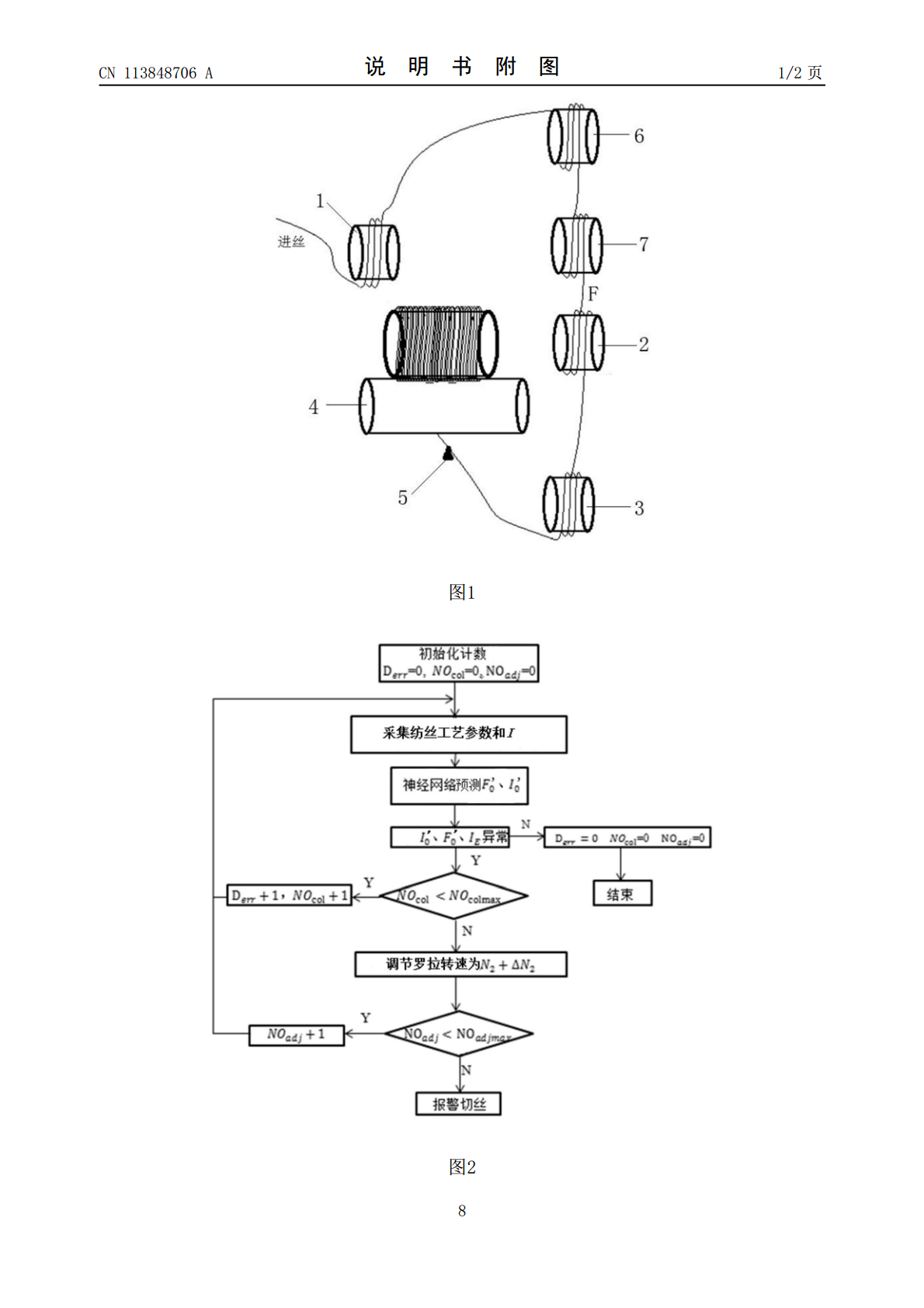
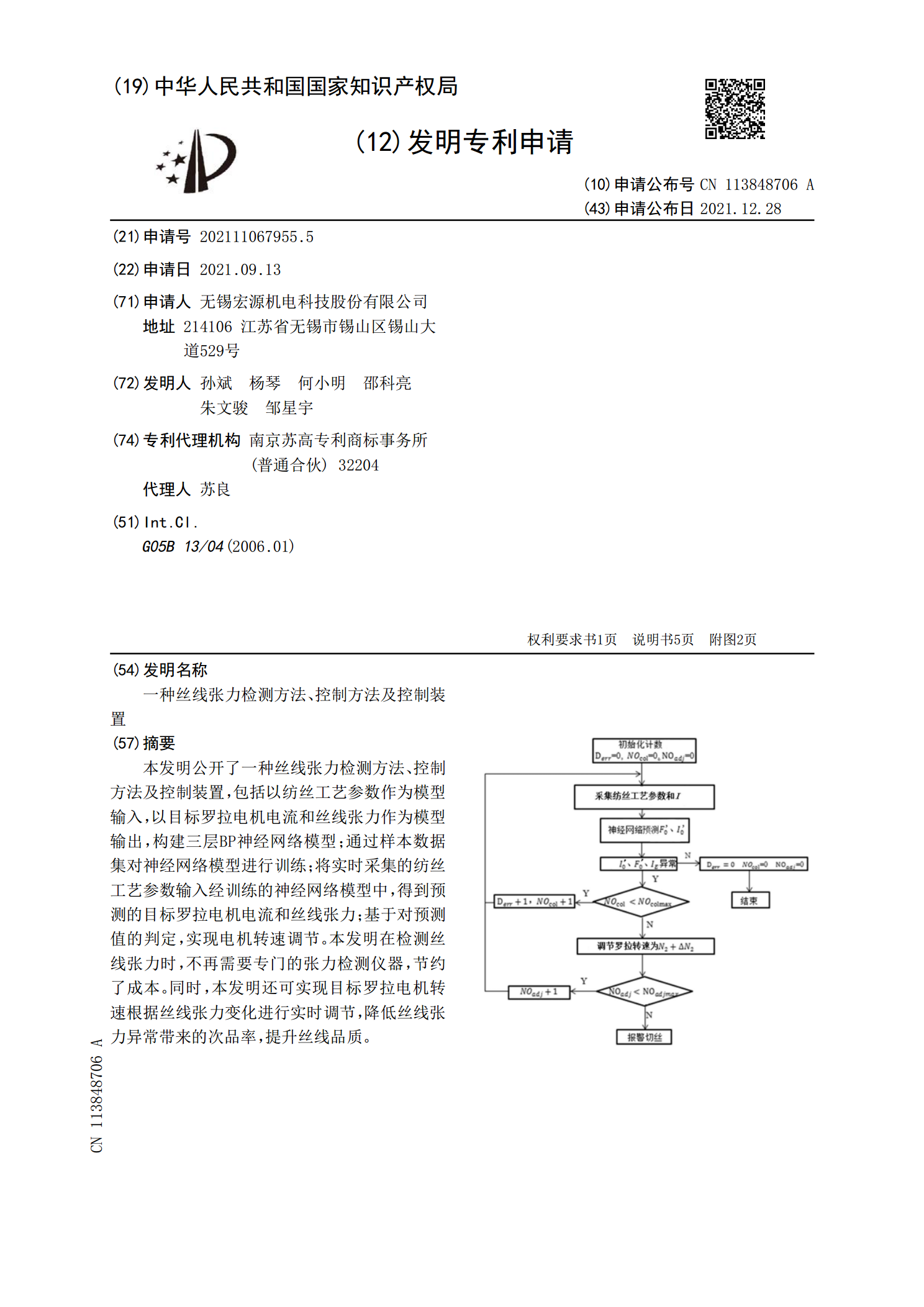
本发明公开了一种丝线张力检测方法、控制方法及控制装置,包括以纺丝工艺参数作为模型输入,以目标罗拉电机电流和丝线张力作为模型输出,构建三层BP神经网络模型;通过样本数据集对神经网络模型进行训练;将实时采集的纺丝工艺参数输入经训练的神经网络模型中,得到预测的目标罗拉电机电流和丝线张力;基于对预测值的判定,实现电机转速调节。本发明在检测丝线张力时,不再需要专门的张力检测仪器,节约了成本。同时,本发明还可实现目标罗拉电机转速根据丝线张力变化进行实时调节,降低丝线张力异常带来的次品率,提升丝线品质。

一种丝线张力检测装置.pdf
本发明公开了一种张力检测装置,包括左立柱、右立柱、直线移动机构、升降机构、张力探头、两个导轮组件、数据处理控制系统和报警器,直线移动机构包括导轨、电机和安装在导轨上的移动块,两个导轮组件并行间隔设置在左立柱和右立柱之间,每个导轮组件分别包括支撑杆和n个导轮,n等于整经过程中丝线的数量,支撑杆的两端分别安装在左立柱和右立柱上,两个导轮组件中的n个导轮一一对应形成n个支撑组件,n个支撑组件与n条丝线一一对应,数据处理控制系统用于控制电机、升降机构和报警器协调工作,数据处理控制系统中预存有张力参考范围;优点是能

经纱张力检测装置及其控制方法.pdf
本申请涉及纺织机械技术领域,尤其是涉及一种经纱张力检测装置及其控制方法。一种经纱张力检测装置,包括安装于纺织架两侧的支撑架,两个支撑架之间安装有张力感应架、第一导向辊以及第二导向辊;张力感应架上安装有两个张力感应辊,且张力传感器一端固定支撑于侧边的张力传感器,另一端固定于中部的感应支撑座。在放卷过程中,两个经轴上的经纱分别经第一导向辊、对应一侧的张力感应辊以及第二导向辊进行导向输送,此时两个张力传感器能够通过对应的张力感应辊来分别检测两个经轴上的经纱张力,以便后续控制器能够通过两个传感器所反馈的张力数据来
一种绕线张力控制装置、控制系统及控制方法.pdf
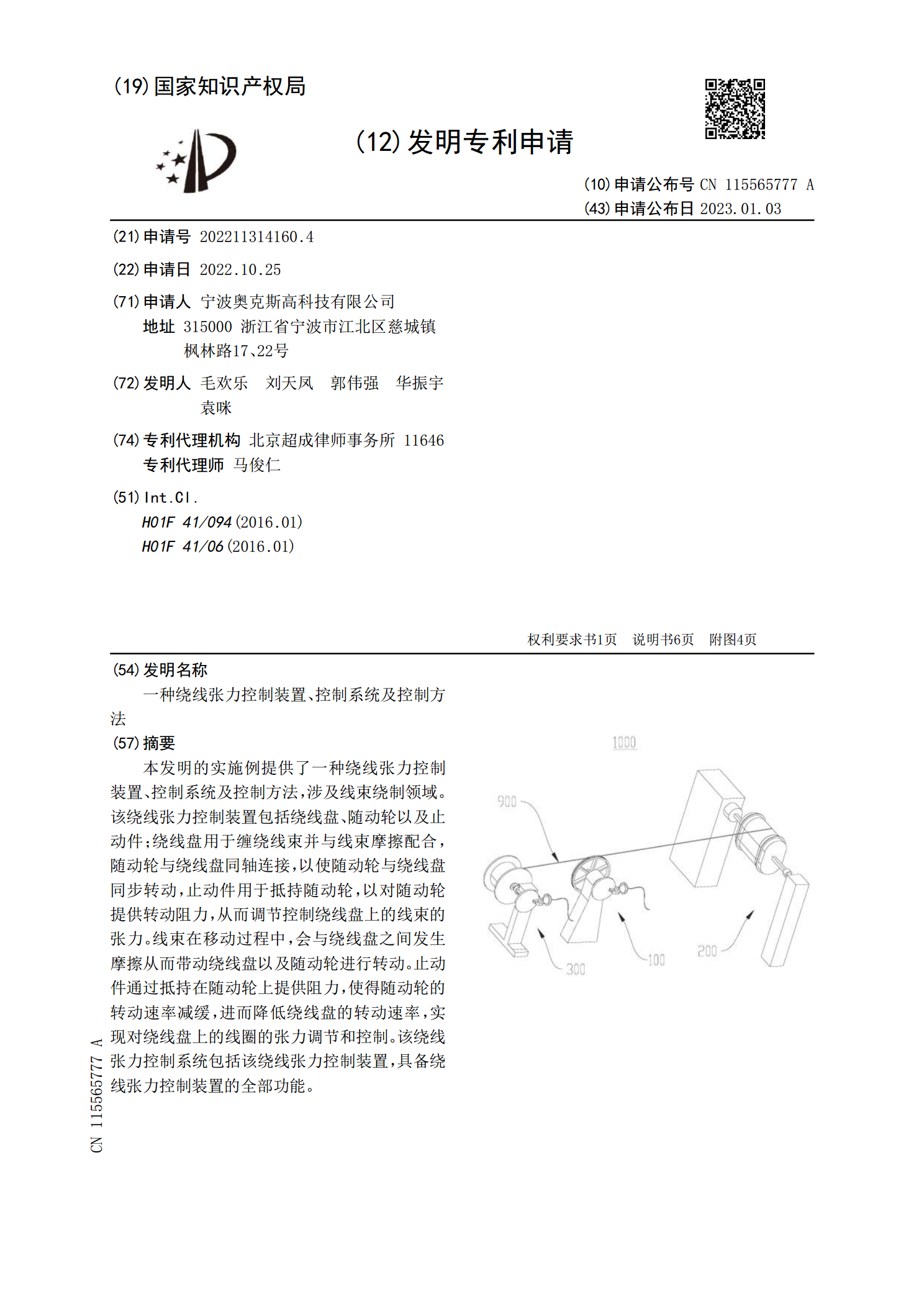
本发明的实施例提供了一种绕线张力控制装置、控制系统及控制方法,涉及线束绕制领域。该绕线张力控制装置包括绕线盘、随动轮以及止动件;绕线盘用于缠绕线束并与线束摩擦配合,随动轮与绕线盘同轴连接,以使随动轮与绕线盘同步转动,止动件用于抵持随动轮,以对随动轮提供转动阻力,从而调节控制绕线盘上的线束的张力。线束在移动过程中,会与绕线盘之间发生摩擦从而带动绕线盘以及随动轮进行转动。止动件通过抵持在随动轮上提供阻力,使得随动轮的转动速率减缓,进而降低绕线盘的转动速率,实现对绕线盘上的线圈的张力调节和控制。该绕线张力控制系
一种控制丝线张力大小的结构.pdf
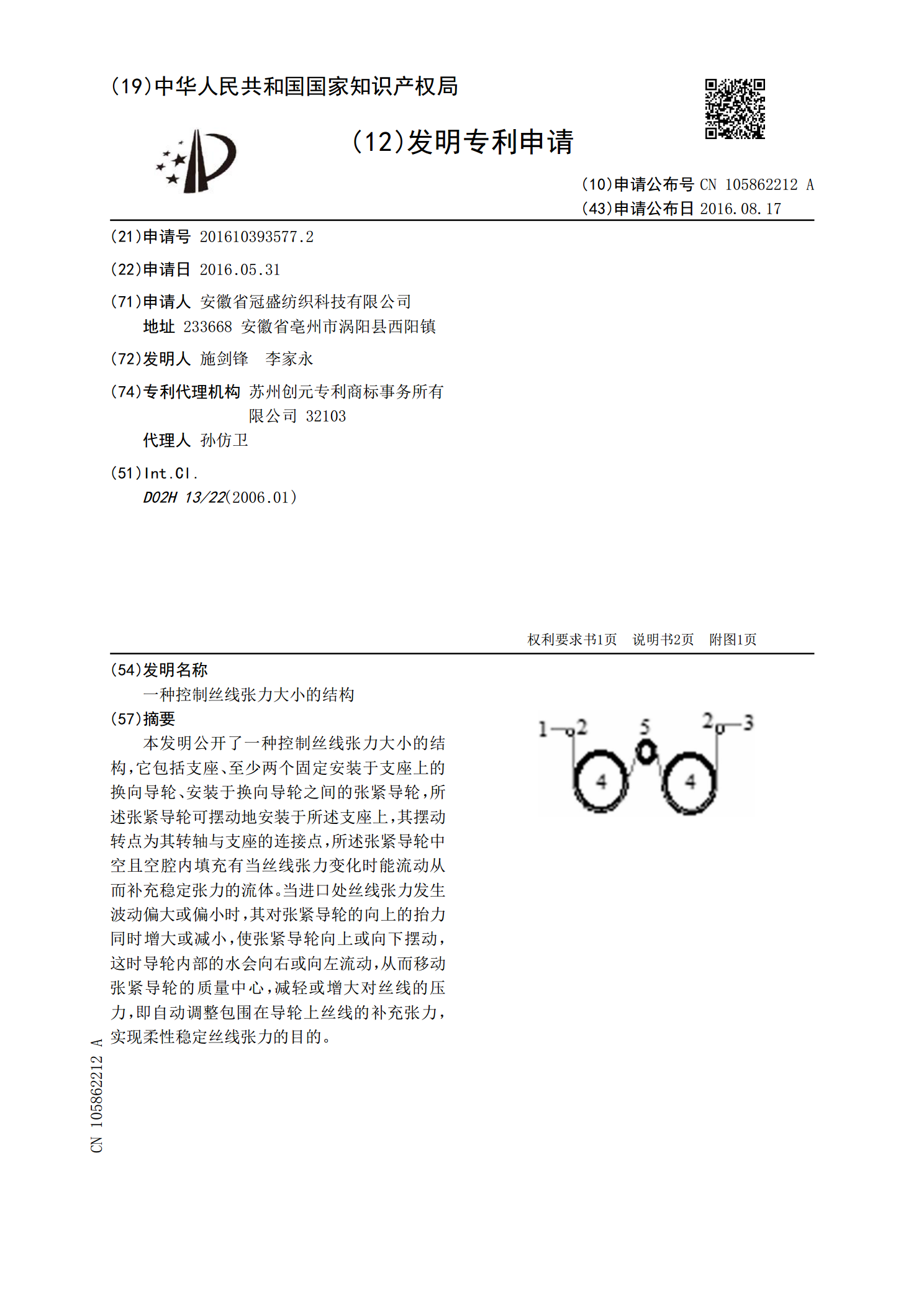
本发明公开了一种控制丝线张力大小的结构,它包括支座、至少两个固定安装于支座上的换向导轮、安装于换向导轮之间的张紧导轮,所述张紧导轮可摆动地安装于所述支座上,其摆动转点为其转轴与支座的连接点,所述张紧导轮中空且空腔内填充有当丝线张力变化时能流动从而补充稳定张力的流体。当进口处丝线张力发生波动偏大或偏小时,其对张紧导轮的向上的抬力同时增大或减小,使张紧导轮向上或向下摆动,这时导轮内部的水会向右或向左流动,从而移动张紧导轮的质量中心,减轻或增大对丝线的压力,即自动调整包围在导轮上丝线的补充张力,实现柔性稳定丝线