
基于多源数据融合的交叉口实时交通状态估计方法及系统.pdf

代瑶****zy


1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多源数据融合的交叉口实时交通状态估计方法及系统.pdf
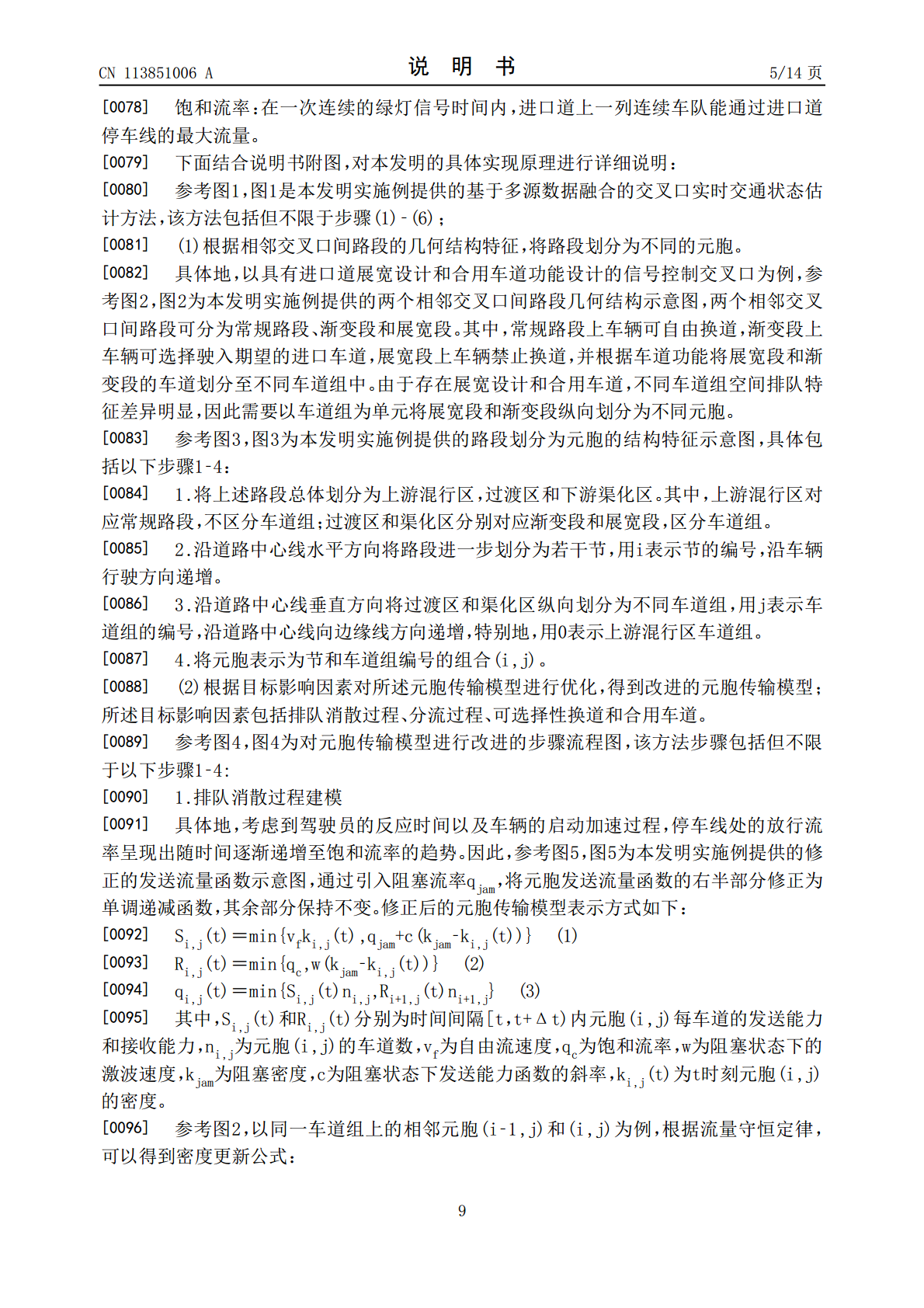
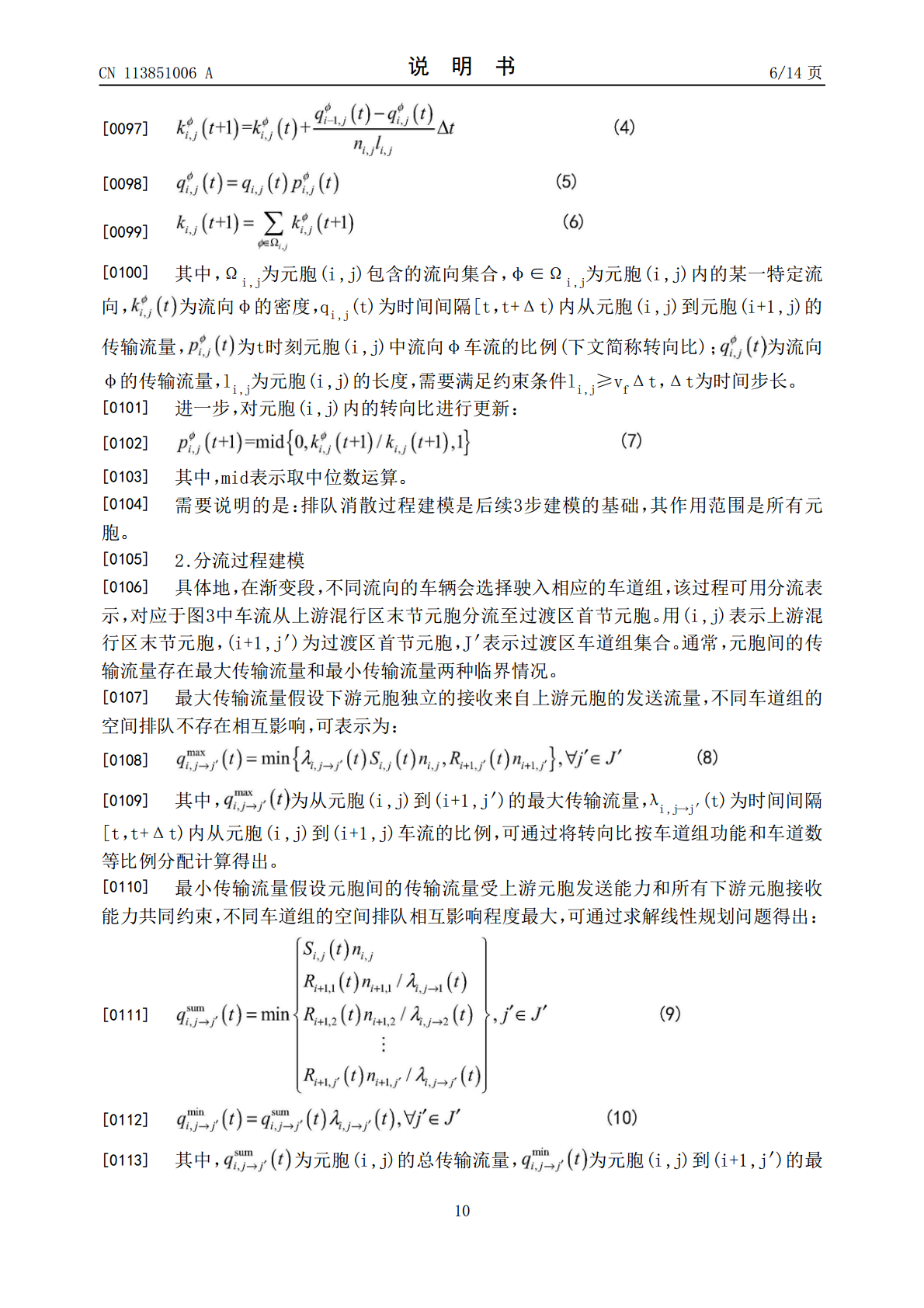
本发明公开了基于多源数据融合的交叉口实时交通状态估计方法及系统,方法包括:根据相邻交叉口间路段的几何结构特征,将路段划分为不同的元胞;根据目标影响因素对所述元胞传输模型进行优化,得到改进的元胞传输模型;所述目标影响因素包括排队消散过程、分流过程、可选择性换道和合用车道;根据所述改进的元胞传输模型建立系统模型;根据固定检测器数据和车辆轨迹数据建立测量模型;根据贝叶斯滤波框架融合所述系统模型和所述测量模型,并根据粒子滤波算法计算系统状态的后验估计;根据所述后验估计的结果,计算交通道路中各个车道组的排队长度。本

基于浮动车数据的实时交通状态估计.docx
基于浮动车数据的实时交通状态估计基于浮动车数据的实时交通状态估计摘要:随着城市交通的日益拥挤和交通管理的复杂性增加,实时监测和估计交通状态变得至关重要。浮动车数据是指通过全球定位系统(GPS)等技术获取的车辆移动数据,包括车辆位置、速度、方向等信息。本文将探讨基于浮动车数据的实时交通状态估计的方法和应用。一、引言城市交通拥堵是当今社会面临的重要挑战之一。根据统计数据,在高峰时段,城市交通流量通常超过道路容量的75%,导致时间浪费、燃料消耗和环境污染。因此,实时监测和评估交通状态对于交通管理和交通规划至关重
一种基于多源数据融合的电网抗差状态估计方法.pdf
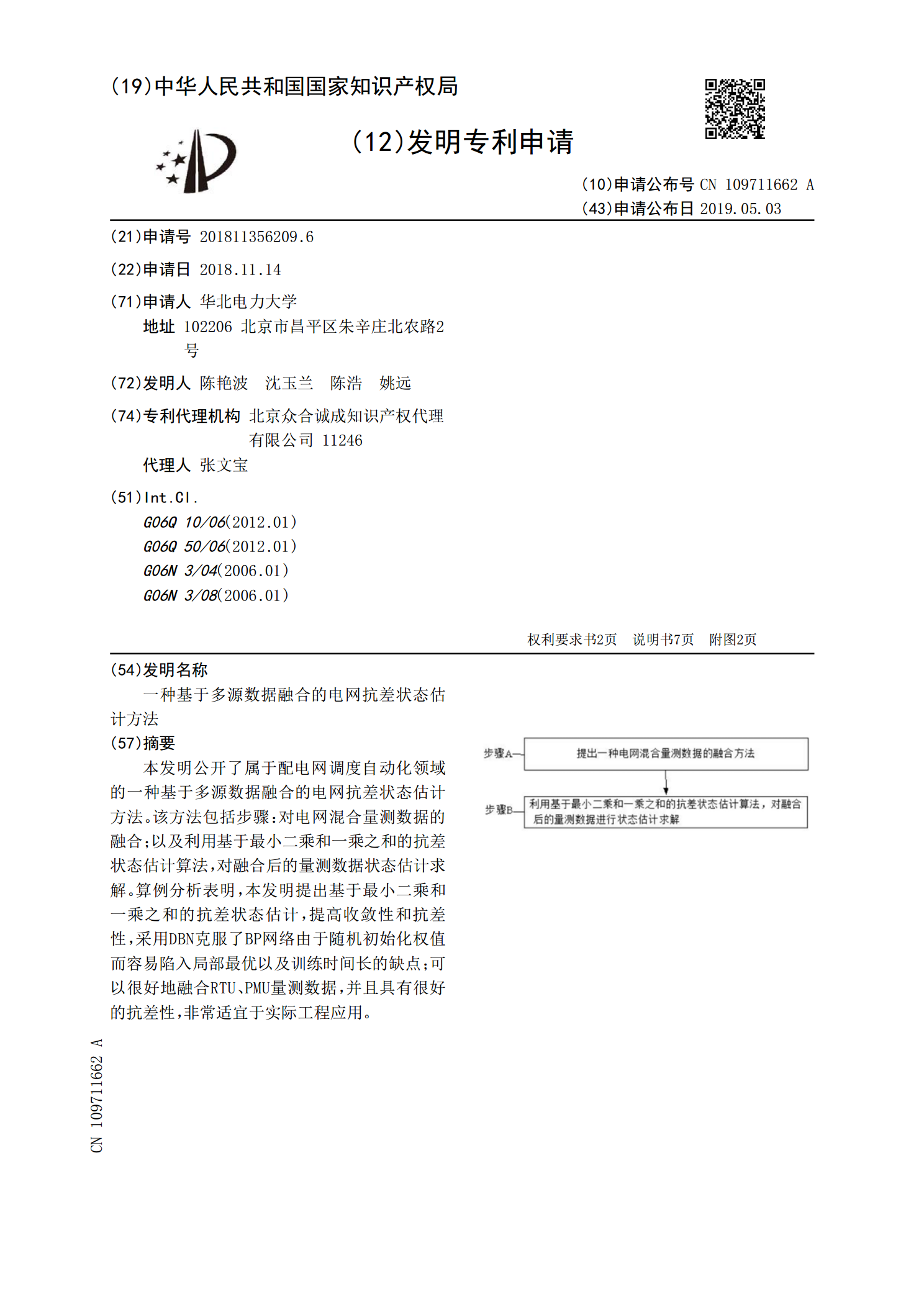
本发明公开了属于配电网调度自动化领域的一种基于多源数据融合的电网抗差状态估计方法。该方法包括步骤:对电网混合量测数据的融合;以及利用基于最小二乘和一乘之和的抗差状态估计算法,对融合后的量测数据状态估计求解。算例分析表明,本发明提出基于最小二乘和一乘之和的抗差状态估计,提高收敛性和抗差性,采用DBN克服了BP网络由于随机初始化权值而容易陷入局部最优以及训练时间长的缺点;可以很好地融合RTU、PMU量测数据,并且具有很好的抗差性,非常适宜于实际工程应用。

基于多源数据融合的交通流状态识别研究.docx
基于多源数据融合的交通流状态识别研究基于多源数据融合的交通流状态识别研究摘要:随着城市交通发展的快速增长,对交通流状态的准确识别和预测变得越来越重要。本文针对此问题,提出了一种基于多源数据融合的交通流状态识别方法。该方法结合了交通感知数据、交通网络数据和交通历史数据,通过数据预处理、特征提取和机器学习模型训练三个步骤,实现了对交通流状态的准确识别。实验结果表明,该方法在交通流状态识别任务中具有较高的准确率和可靠性。1.引言随着城市交通流量的不断增加,对交通流状态进行有效的识别和预测变得尤为重要。交通流状态
一种基于UKF的实时多源数据融合方法.pdf
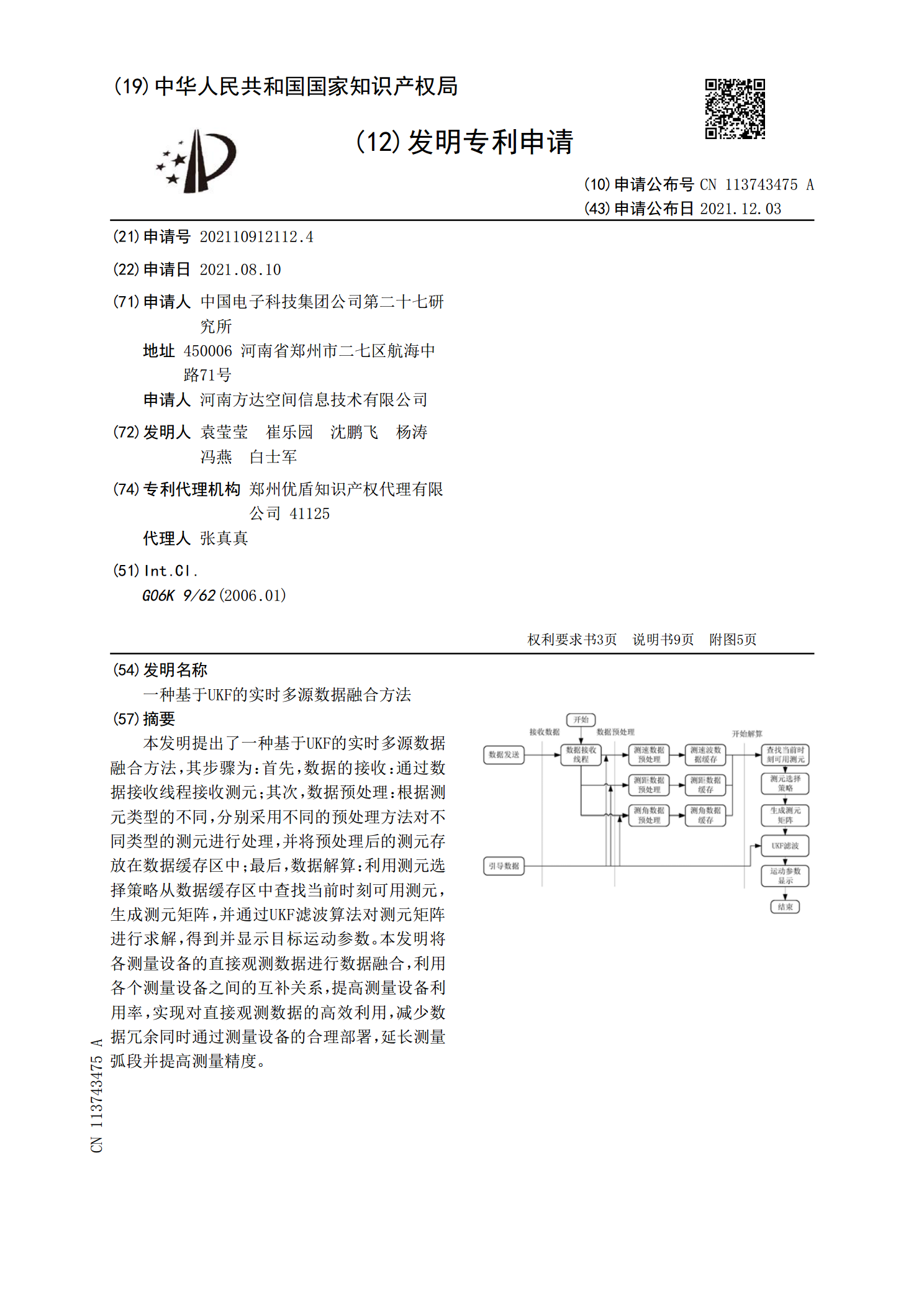
本发明提出了一种基于UKF的实时多源数据融合方法,其步骤为:首先,数据的接收:通过数据接收线程接收测元;其次,数据预处理:根据测元类型的不同,分别采用不同的预处理方法对不同类型的测元进行处理,并将预处理后的测元存放在数据缓存区中;最后,数据解算:利用测元选择策略从数据缓存区中查找当前时刻可用测元,生成测元矩阵,并通过UKF滤波算法对测元矩阵进行求解,得到并显示目标运动参数。本发明将各测量设备的直接观测数据进行数据融合,利用各个测量设备之间的互补关系,提高测量设备利用率,实现对直接观测数据的高效利用,减少数