
全回转起重船压载水动态调拨协同作业控制仿真方法及系统.pdf

一条****丹淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全回转起重船压载水动态调拨协同作业控制仿真方法及系统.pdf
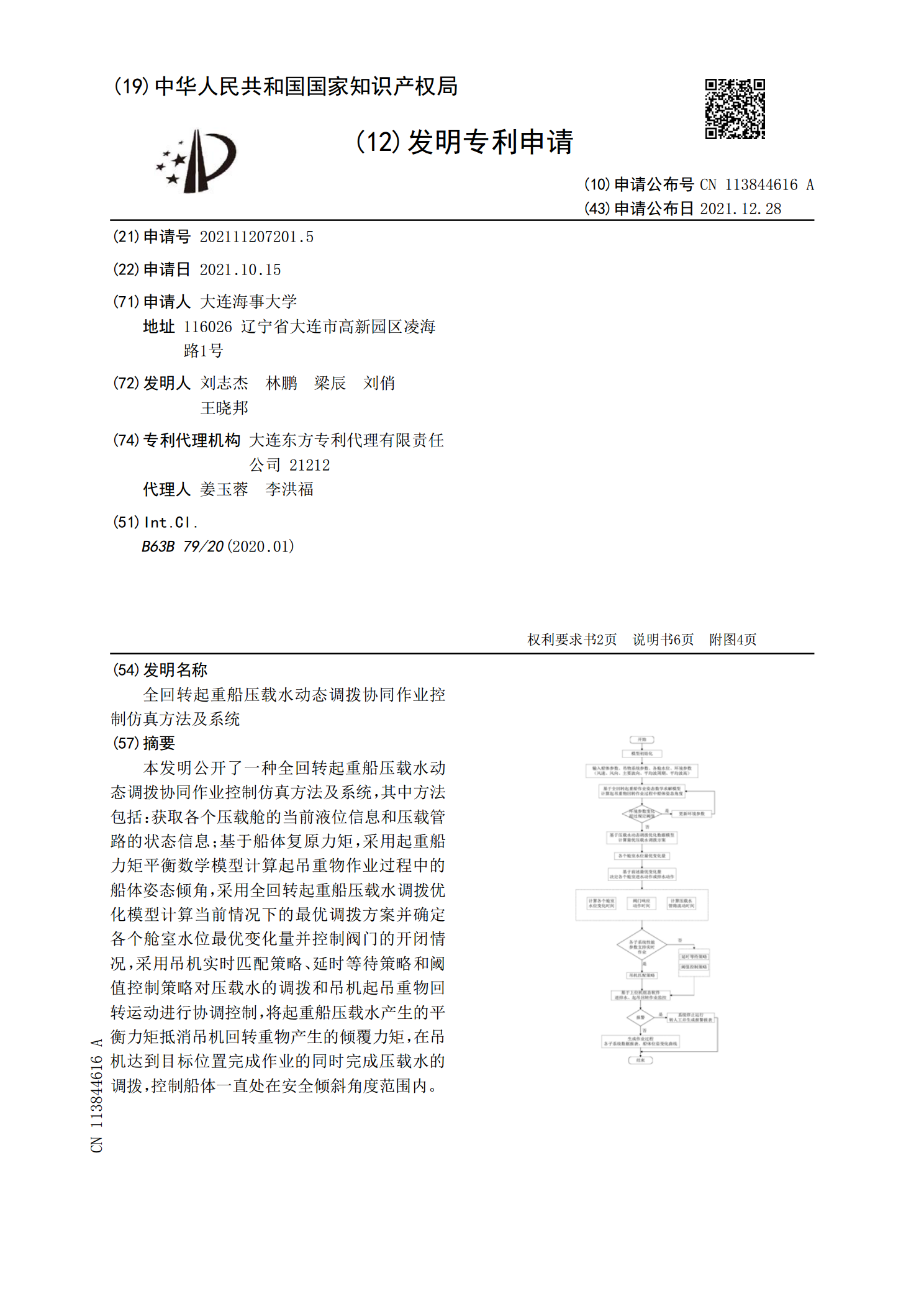
本发明公开了一种全回转起重船压载水动态调拨协同作业控制仿真方法及系统,其中方法包括:获取各个压载舱的当前液位信息和压载管路的状态信息;基于船体复原力矩,采用起重船力矩平衡数学模型计算起吊重物作业过程中的船体姿态倾角,采用全回转起重船压载水调拨优化模型计算当前情况下的最优调拨方案并确定各个舱室水位最优变化量并控制阀门的开闭情况,采用吊机实时匹配策略、延时等待策略和阈值控制策略对压载水的调拨和吊机起吊重物回转运动进行协调控制,将起重船压载水产生的平衡力矩抵消吊机回转重物产生的倾覆力矩,在吊机达到目标位置完成作

全回转起重船压载水调拨方案优化研究的开题报告.docx
全回转起重船压载水调拨方案优化研究的开题报告一、选题背景全回转起重船可以在水上平台上作业,具有远离岸上设施的优势,使得搭载于船上进行的压载水调拨的作业更加安全、高效。然而,压载水调拨的作业过程中,其液平面会随着调拨的不断进行而发生变化,因此需要通过对船体的倾斜和沉浸来调整船体的平衡,使得船体能够安全稳定地进行调拨作业。由于调拨的过程需要积极充分地考虑作业安全性和效率,因此需要对此进行优化研究,以提高全回转起重船压载水调拨作业的质量和效率。二、研究目的本研究旨在通过对全回转起重船压载水调拨方案进行优化研究,

全回转起重船压载水调拨方案优化研究的任务书.docx
全回转起重船压载水调拨方案优化研究的任务书任务书一、任务背景全回转起重船是一种专门用于海上大型物件吊装和安装的船舶。由于其具有大承载力、高灵活性、大作业范围等特点,因此广泛应用于工程建设、船舶维修、钻探平台等领域。目前,全回转起重船常使用压载水进行调拨,以提高船舶的稳定性和可操作性。然而,在实际使用中,起重船压载水调拨的方案常常受到海况、起重工作情况等多种因素影响,难以达到最优状态。因此,为了提高起重船在压载水调拨时的运行效率和安全性,需要对其调拨方案进行优化研究。二、任务目标本次研究旨在通过对全回转起重

起重船PGC复合压载系统压载水调拨优化模型及应用研究的任务书.docx
起重船PGC复合压载系统压载水调拨优化模型及应用研究的任务书任务书一、选题背景随着全球贸易的发展,港口装卸作业也日益繁忙,特别是海洋平台等深海作业所需的大型起重设备如复合式起重船,受到了越来越多的重视。然而,在实际操作过程中,由于海洋环境的复杂性以及人为操作的误差,复合式起重船在压载系统的使用上往往存在一些不可避免的问题,例如压载水量不均匀、受力失衡等,从而影响装卸作业的效率和安全。因此,研究如何优化复合式起重船中的压载水调拨问题,对于提升起重船操作能力、保障作业安全具有十分重要的意义。二、研究目标本课题

应用数学建模的全回转起重船压载系统自动化控制研究.docx
应用数学建模的全回转起重船压载系统自动化控制研究标题:应用数学建模的全回转起重船压载系统自动化控制研究摘要:本论文针对全回转起重船压载系统自动化控制问题进行研究,通过应用数学建模方法,分析系统的结构和工作原理,设计相应的控制策略和算法,以提高系统的效率和安全性。研究结果表明,应用数学建模在全回转起重船压载系统自动化控制领域具有重要的应用价值。关键词:全回转起重船;压载系统;自动化控制;数学建模第1章:绪论1.1研究背景1.2研究意义1.3研究目的和内容1.4论文结构第2章:全回转起重船压载系统概述2.1全