
一种大中型地下智能停车场反向寻车系统.pdf

光誉****君哥


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种大中型地下智能停车场反向寻车系统.pdf
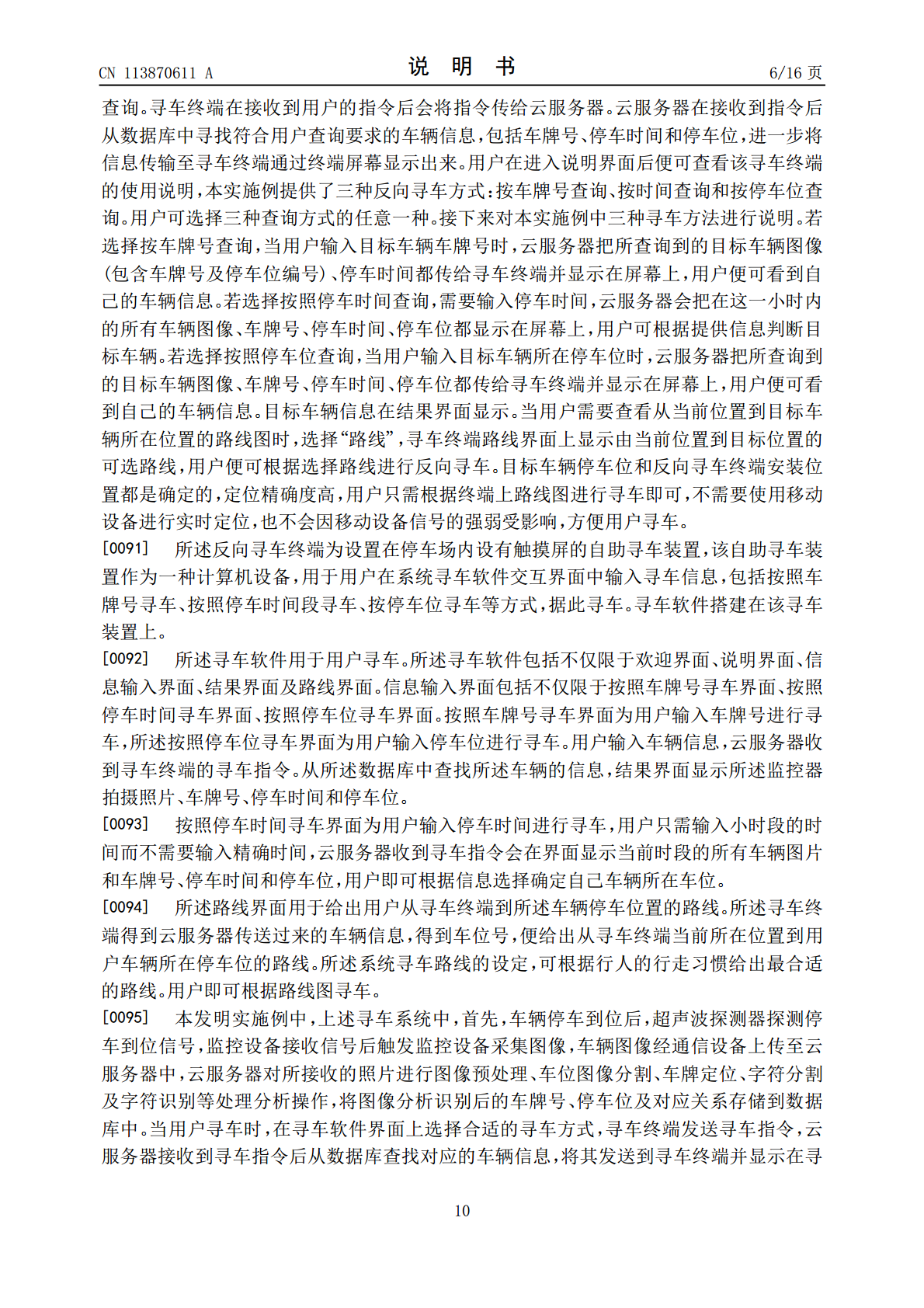
一种大中型地下智能停车场反向寻车系统,涉及停车场车辆管理技术领域,针对现有技术中缺少寻车路线规划的问题,包括:车辆信息采集模块、云服务器和寻车终端,车辆信息采集模块用于采集车辆停放位置信息,云服务器用于分析并存储采集到的车辆停放位置信息,寻车终端用于根据车辆停放位置信息给出从当前位置到目标车辆所在位置导航路线图。本申请的反向寻车系统不需要用户使用手机或其他移动端下载额外的App,也不需要登陆额外的寻车网站,在寻车终端上就可以对用户车辆信息进行显示,完成寻车查询与路线引导,减少地下停车场信号缺失对用户寻车,

石家庄智能停车场系统--反向引导寻车系统.doc
石家庄智能停车场管理系统反向学车系统一、概述随着经济的迅速发展,汽车保有量的稳步提升,与之相应的是各个城市的大型停车场越来越多,尤其是大型商业大厦、医院、车站等公共场所的大型停车场,主要面对临时停放的客人提供服务,已经逐渐成为必不可少的配套设施,其运作和管理水准直接关系着整个服务的水平,停车场的智能化也越来越受到物业管理者的重视。在各个城市的交通状况都越发严峻的当下,如果停车智能化建设逐步提高,我们认为一个理想的顺畅停车流程大体应该包括以下部分:在前往某地之前,通过停车导航网站,查询获知该地点周边的停车场

基于AR技术的大型地下停车场反向寻车系统设计.docx
基于AR技术的大型地下停车场反向寻车系统设计张维【摘要】随着我国建筑、交通事业的快速发展,为满足人们的停车需求而建立了大型地下停车场,导致出现寻车难问题。如今市场加强了对低成本、部署简单的反向寻车系统的研究,如增强现实技术可将虚拟画面与现实环境叠加,继而幫助车主导航车辆具体位置。而且本文主要分析了常见大型停车场反向寻车系统及弊端,阐述了大型地下停车场反向寻车系统AR技术应用特征,并针对大型地下停车场反向寻车系统AR技术设计及实践进行了探讨,以期提高车主寻找车辆效率。【关键词】增强现实技术;大型地下停车场;

基于AR技术的大型地下停车场反向寻车系统设计.docx
基于AR技术的大型地下停车场反向寻车系统设计基于AR技术的大型地下停车场反向寻车系统设计摘要:随着城市交通拥堵和车辆数量的增加,大型地下停车场将越来越被广泛使用。然而,很多车主在停车场中往往会遇到找不到车辆的问题。本论文提出了一种基于增强现实(AR)技术的大型地下停车场反向寻车系统设计,通过使用AR技术来辅助车主找到停放在地下停车场中的车辆,从而提高寻车效率和用户体验。1.简介1.1背景地下停车场在大型城市中是一项重要的基础设施。然而,由于停车场通常是一个庞大的区域,并且缺乏明确的标志和导航系统,车主在地

Keytop停车场反向寻车系统方案.pdf
Keytop停车场找车机系统解决方案Keytop反向寻车系统方案Keytop反向寻车系统停车场找车机介绍在商场、购物中心等大型停车场内,车主在返回停车场时往往由于停车场空间大,环境及标志物类似、方向不易辨别等原因,容易在停车场内迷失方向,寻找不到自己的车辆。科拓找车系统通过视频图像处理技术,实现了通过车牌号输入,显示车主及车辆所处的位置,帮助顾客尽快找到车辆停放的区域,从而提高顾客对停车场乃至其所属物业公司的满意度;加快停车场的车辆周转,提高停车场的使用率和经济效益;提升停车场管理水平,提高停车场所属物业