
无线传感器网络覆盖技术.pdf

15****20

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无线传感器网络覆盖技术.pdf
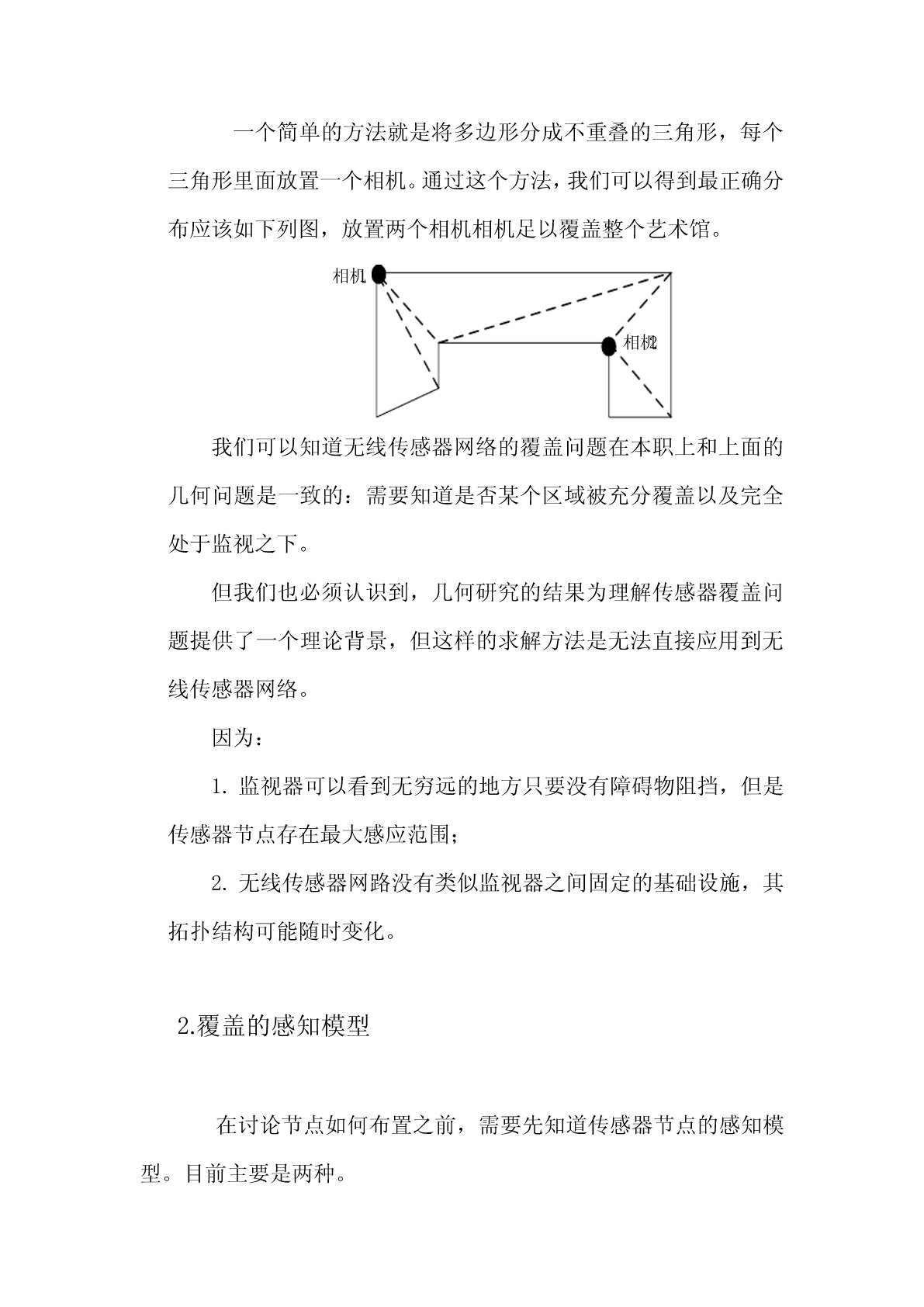
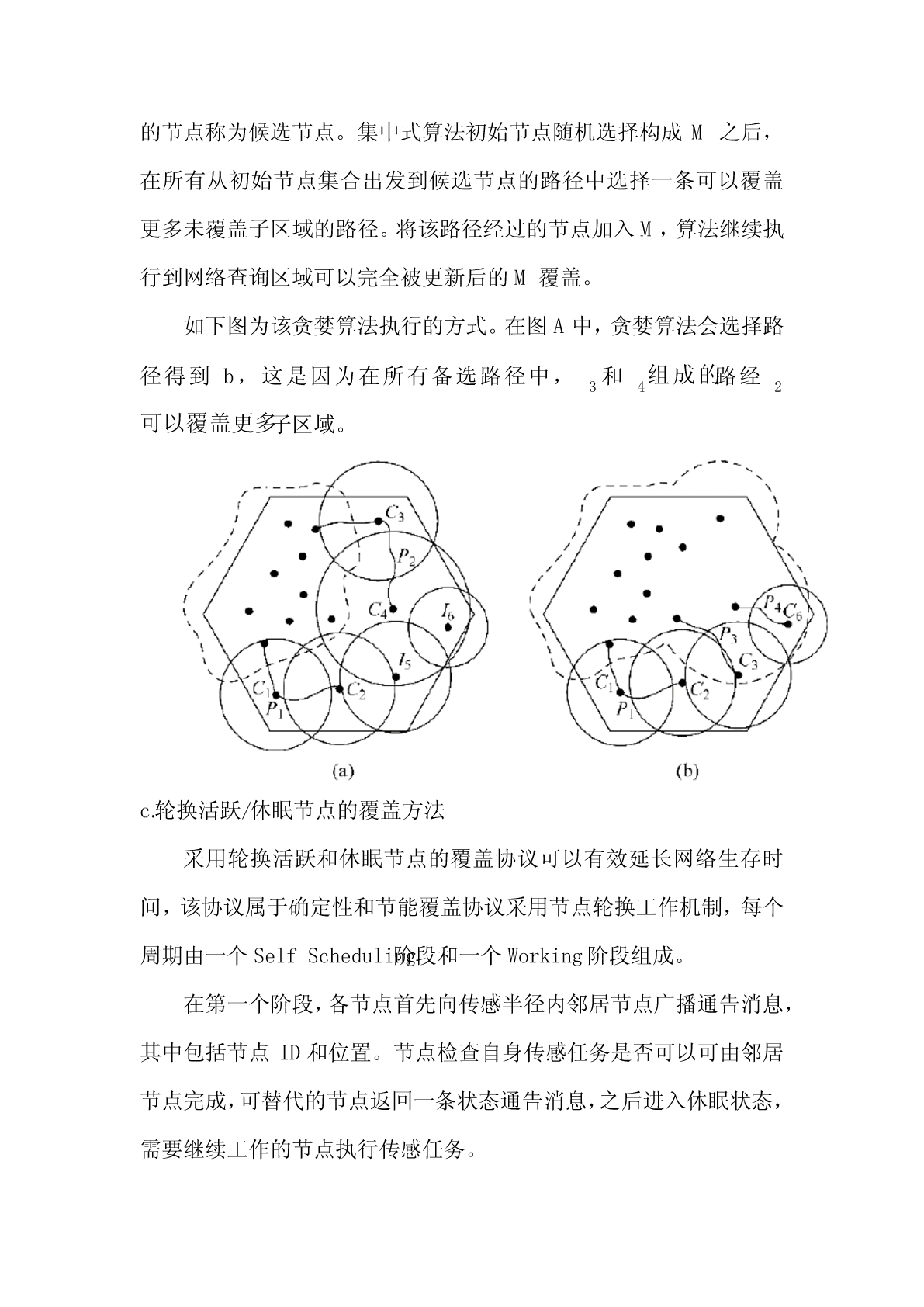
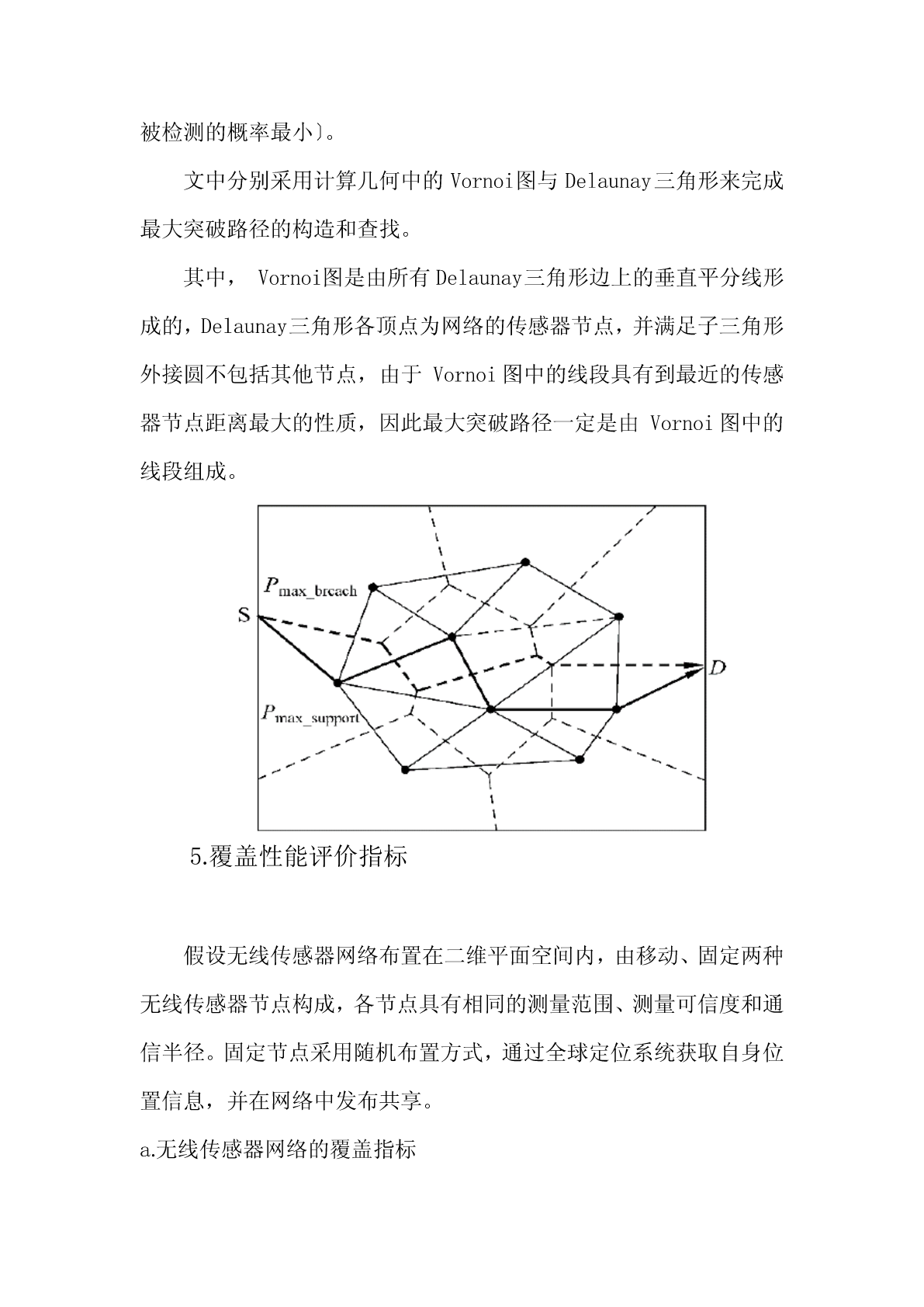
无线传感器网络覆盖技术谭慧婷150400241.覆盖技术理论基础覆盖问题是无线传感器网络配置首先要面对的基本问题,它反映了一个无线传感器网络某区域被检测和跟踪的状况。现有的研究结果,很多都是致力于解决传感器网络的部署和检测以及覆盖与连接的关系等方面的问题。覆盖问题可以表述成不同的理论模型,甚至在平面几何里就能找到相应的解决方案。即使简单地只从数学上来考虑,在部署传感器节点的时候,我们必须知道怎样用相同的节点数覆盖尽可能大的区域。为了对网络的覆盖问题先有一个初步的认识,这里我们提出一个几何问题-艺术馆问题来

无线传感器网络覆盖控制的研究.docx
无线传感器网络覆盖控制的研究摘要:无线传感器网络是一种广泛应用于环境监测、资源调度、智能交通等领域的技术,然而,如何使其中的传感器节点能够高效地覆盖监测区域,仍然是一个值得研究的问题。本文对无线传感器网络覆盖控制的研究进行了探讨,阐述了其研究意义、现状和研究方法,并介绍了目前已有的几种覆盖控制算法,分析了其优缺点并探讨了未来的研究方向。关键词:无线传感器网络;覆盖控制;算法1.引言随着信息技术和通信技术的快速发展,无线传感器网络作为物联网的核心技术之一,被广泛地应用于环境监测、资源调度、智能交通等领域。无

无线传感器网络覆盖优化策略.docx
无线传感器网络覆盖优化策略随着科学技术的不断发展,无线传感器网络广泛应用于环境监测、农业、工业、医疗等领域中,其覆盖范围和应用价值都在不断扩大。覆盖优化策略是无线传感器网络中重要的研究方向之一,它能够提高网络的覆盖率、降低能耗、增强网络的稳定性和可靠性,是保障无线传感器网络数据采集和传输的关键技术之一。本文将从以下几个方面进行介绍。一、研究现状无线传感器网络的覆盖优化策略主要包括传感器节点的部署方案和区域分块算法两个方面。在传感器节点的部署方案中,覆盖率、能量消耗和数据传输质量是影响节点部署策略的三个主要

无线传感器网络覆盖设计方法、装置.pdf
本申请提供一种无线传感器网络覆盖设计方法、装置、电子设备及存储介质,该无线传感器网络覆盖设计方法包括:基于多个种群中各种群的适应度值选择食物源位置;其中,各种群中包括多个网络节点;基于食物源位置,在多个种群中更新种群集合中各种群的位置;其中,种群集合为多个种群中至少一个种群所构成的集合;基于更新位置后的多个种群中各种群的适应度值,更新食物源位置;根据模拟退火更新食物源位置以及各种群的适应度值,以基于更新后的食物源位置更新种群集合中各种群的位置,得到多个种群中各种群的目标位置和目标适应度值。本申请实施例的技

无线传感器网络覆盖优化控制研究.pptx
无线传感器网络覆盖优化控制研究目录添加章节标题无线传感器网络覆盖优化控制研究背景研究背景和意义国内外研究现状和发展趋势研究目标和主要研究内容无线传感器网络覆盖优化控制技术基础无线传感器网络概述无线传感器网络覆盖问题无线传感器网络覆盖优化控制算法无线传感器网络覆盖优化控制算法研究基于节点移动的覆盖优化算法基于节点休眠的覆盖优化算法基于节点协作的覆盖优化算法算法性能分析和比较无线传感器网络覆盖优化控制实验验证实验平台搭建和测试环境配置实验结果分析和讨论算法性能改进和优化方向探讨无线传感器网络覆盖优化控制应用前