
基于模板匹配的多尺度目标定位方法.pdf

玄静****写意

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于模板匹配的多尺度目标定位方法.pdf
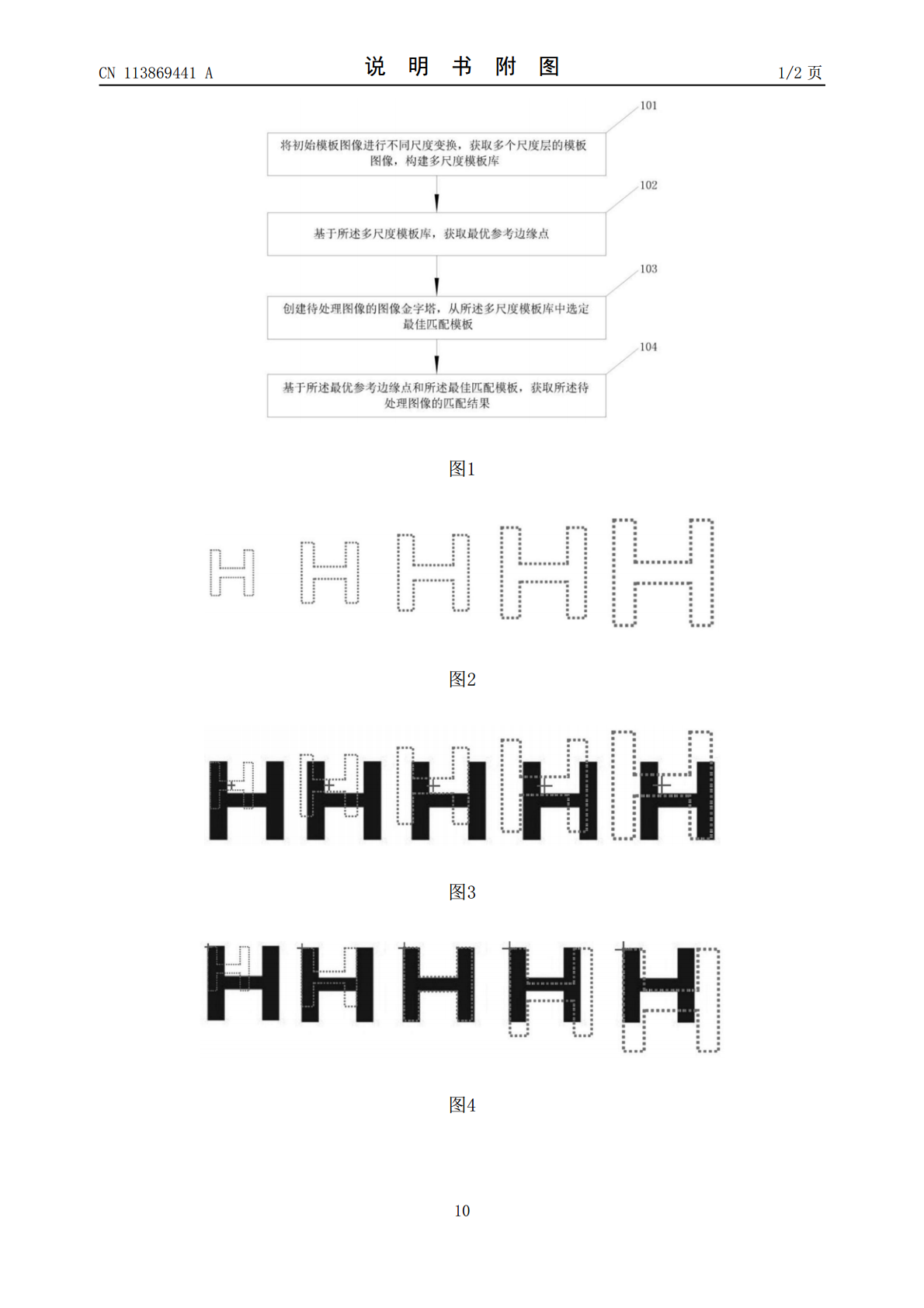
本发明公开了一种基于模板匹配的多尺度目标定位方法,将所述初始模板图像进行不同尺度变换,获取多个尺度层的模板图像,构建多尺度模板库;基于所述多尺度模板库,获取最优参考边缘点;创建待处理图像的图像金字塔,从所述多尺度模板库中选定最佳匹配模板;基于所述最优参考边缘点和所述最佳匹配模板,获取所述待处理图像的匹配结果。本发明通过构建多尺度模板库获取最优参考边缘点,基于所述最优参考边缘点进行图像匹配,有效提高不同尺度变换后的待匹配图像的匹配精度和匹配效率。

基于多尺度模板匹配和部件模型的车牌字符分割方法.docx
基于多尺度模板匹配和部件模型的车牌字符分割方法摘要在车辆管理领域,车牌字符分割是车牌识别的一个重要步骤。本文提出了一种基于多尺度模板匹配和部件模型的车牌字符分割方法。该方法利用多尺度模板匹配和部件模型来对车牌中的字符进行分割。具体来说,该方法首先使用多尺度模板匹配技术确定车牌的位置,并利用部件模型对车牌进行分割。实验结果表明,该方法能够有效地提高车牌字符分割的准确性和鲁棒性。关键词:多尺度模板匹配;部件模型;车牌字符分割Introduction车辆管理领域中的车牌识别技术实现了快速、准确的车辆识别。在车牌

基于多尺度模板匹配和神经网络的车牌识别.docx
基于多尺度模板匹配和神经网络的车牌识别一、引言车牌识别是图像识别领域中的一个重要应用,具有广泛的应用前景。近年来,随着深度学习和计算机视觉技术的飞速发展,车牌识别技术得到了迅速发展。本文结合多尺度模板匹配和神经网络方法,探索车牌识别的解决方案。二、多尺度模板匹配多尺度模板匹配是一种基于模板匹配的目标识别方法。该方法主要包括图像预处理、特征提取和匹配三步。首先,对图像进行归一化处理,将其转化为频域上的图像。然后选取合适的滤波器对图像进行滤波处理,以降低噪声干扰。接着,进行特征提取,通过构造多个尺度下的模板进

多尺度地图的水系面目标与线目标匹配方法与实验.docx
多尺度地图的水系面目标与线目标匹配方法与实验摘要:针对多尺度地图中水系面目标与线目标不匹配的问题,本文提出了一种基于形状特征与拓扑关系的匹配方法。首先,使用多尺度形态学方法对水系进行分割,并提取其形状特征;然后,使用HolisticTopographicShapeDescriptor(HTSD)对水系线目标进行形状特征提取;最后,利用拓扑关系进行匹配,得到水系面目标与线目标的对应关系。实验结果表明,本文提出的方法能够有效地匹配多尺度地图中的水系面目标与线目标。关键词:多尺度地图,水系,匹配,形状特征,拓扑

基于模板匹配算法的人眼定位方法.docx
基于模板匹配算法的人眼定位方法基于模板匹配算法的人眼定位方法摘要:人眼定位是计算机视觉领域中的一项重要任务,它在许多应用中扮演着关键的角色。本文提出一种基于模板匹配算法的人眼定位方法,该方法利用图像中人眼区域的特定特征进行匹配,从而得到准确的人眼位置。实验结果表明,该方法在人眼定位任务中表现出良好的性能。关键词:人眼定位、模板匹配算法、计算机视觉、特征提取1.引言人眼是人类感知世界的重要工具,人眼定位是计算机视觉领域的一个重要研究方向。它在许多应用中有着广泛的应用,如人脸识别、眼动追踪、姿态估计等。人眼定