
智能网联车辆无信号交叉口通行协调方法及系统.pdf

雨星****萌娃

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能网联车辆无信号交叉口通行协调方法及系统.pdf
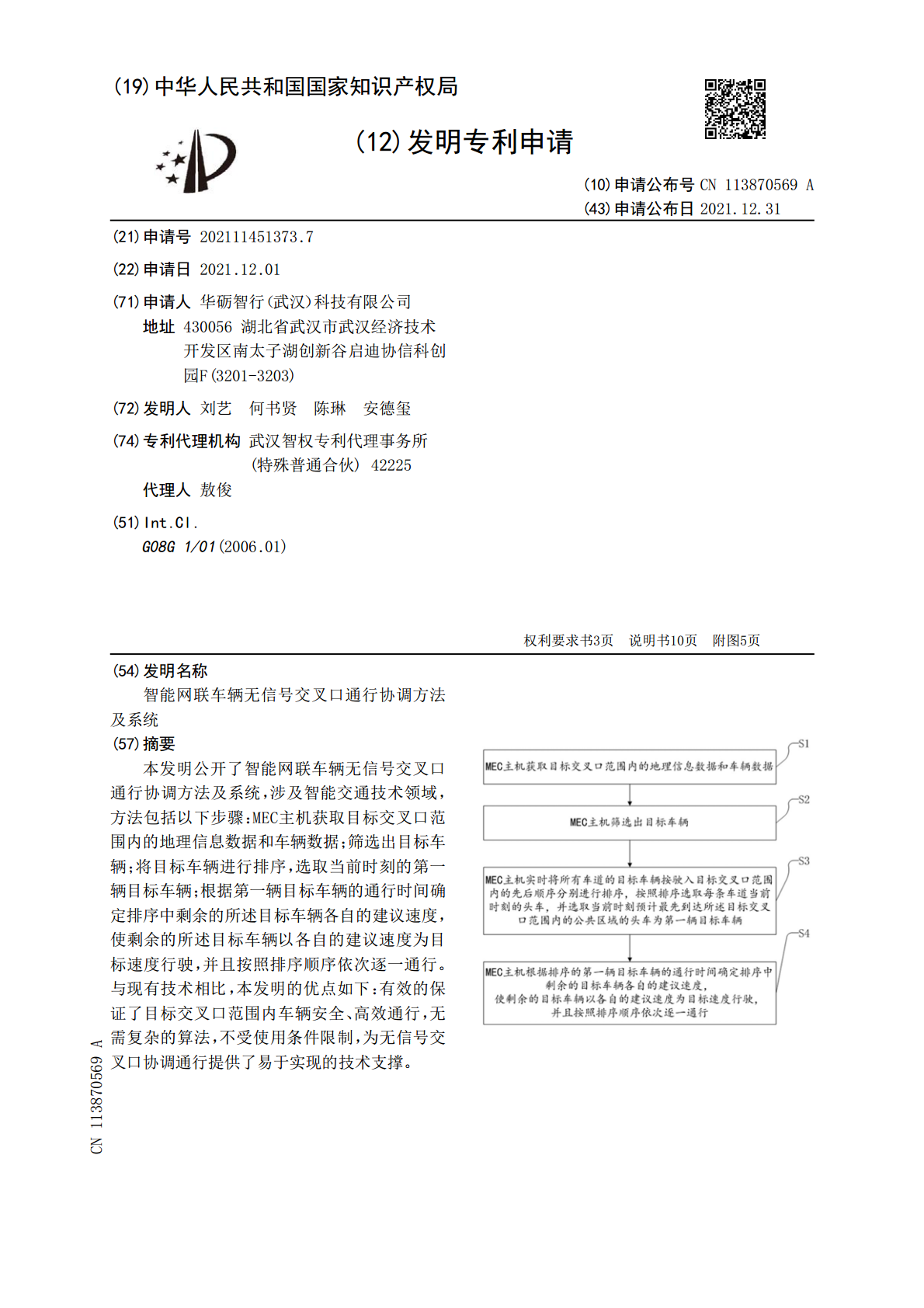
本发明公开了智能网联车辆无信号交叉口通行协调方法及系统,涉及智能交通技术领域,方法包括以下步骤:MEC主机获取目标交叉口范围内的地理信息数据和车辆数据;筛选出目标车辆;将目标车辆进行排序,选取当前时刻的第一辆目标车辆;根据第一辆目标车辆的通行时间确定排序中剩余的所述目标车辆各自的建议速度,使剩余的所述目标车辆以各自的建议速度为目标速度行驶,并且按照排序顺序依次逐一通行。与现有技术相比,本发明的优点如下:有效的保证了目标交叉口范围内车辆安全、高效通行,无需复杂的算法,不受使用条件限制,为无信号交叉口协调通行
一种智能网联汽车队列信号交叉口通行引导方法.pdf
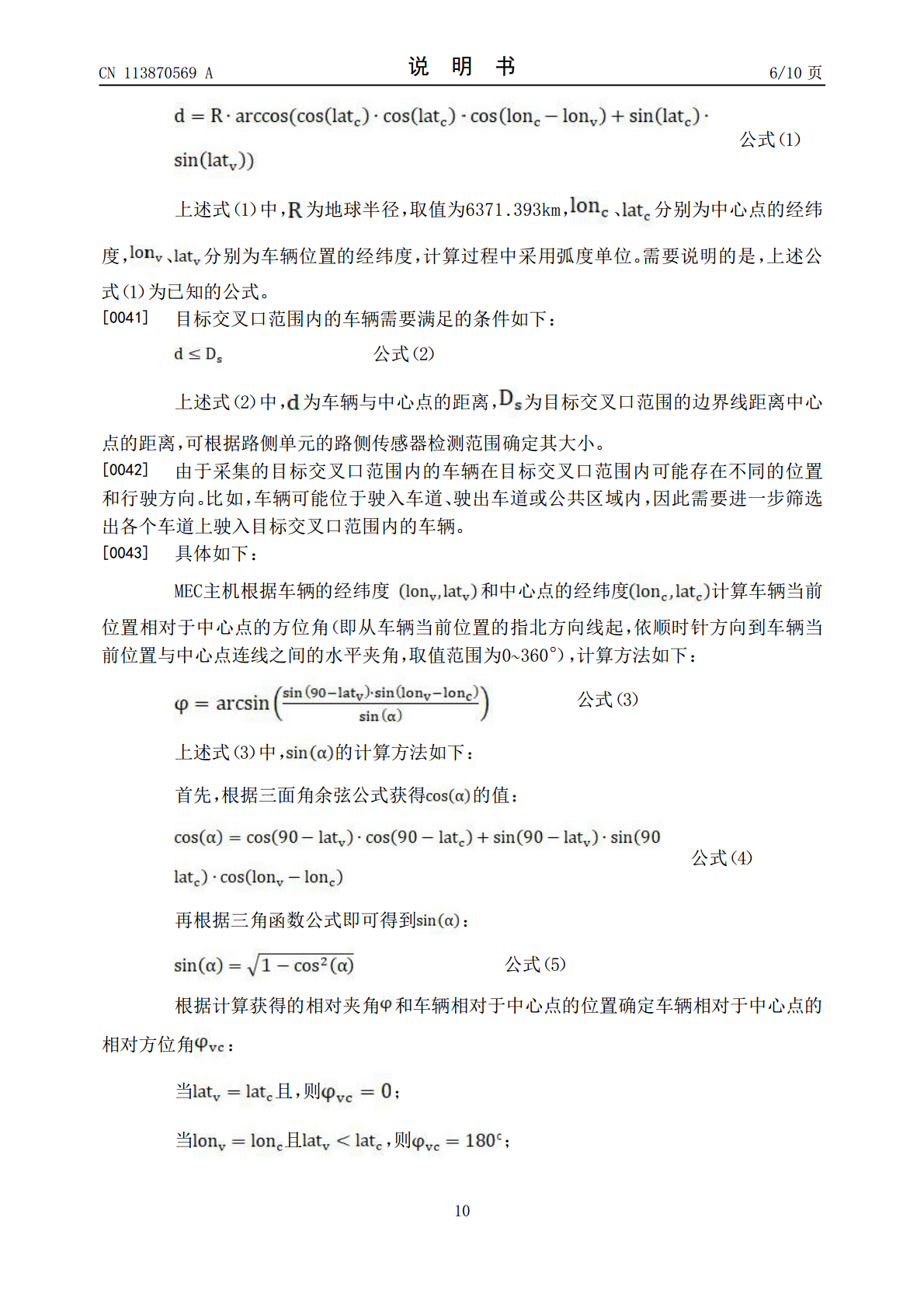
本发明涉及一种智能网联汽车队列信号交叉口通行引导方法。该方法主要包括:获取路口交通信号灯的相位配时信息及控制区域内待行车辆队列信息;对智能网联汽车进行队列划分;确定车辆队列能够顺利通过信号交叉口的允许时间范围;构建车辆队列行驶轨迹车速集;以车辆队列能耗最优为目标,对车辆队列行驶轨迹车速进行优化。该方法考虑到信号灯智能化程度低的实际情况,利用现有技术条件,有效提升路口通行效率,改善车辆节能效果,为智慧交通中车辆安全、节能、高效控制提供了有效可靠的解决方案。
智能网联混合交通流信号交叉口车辆到达预测修正方法.pdf
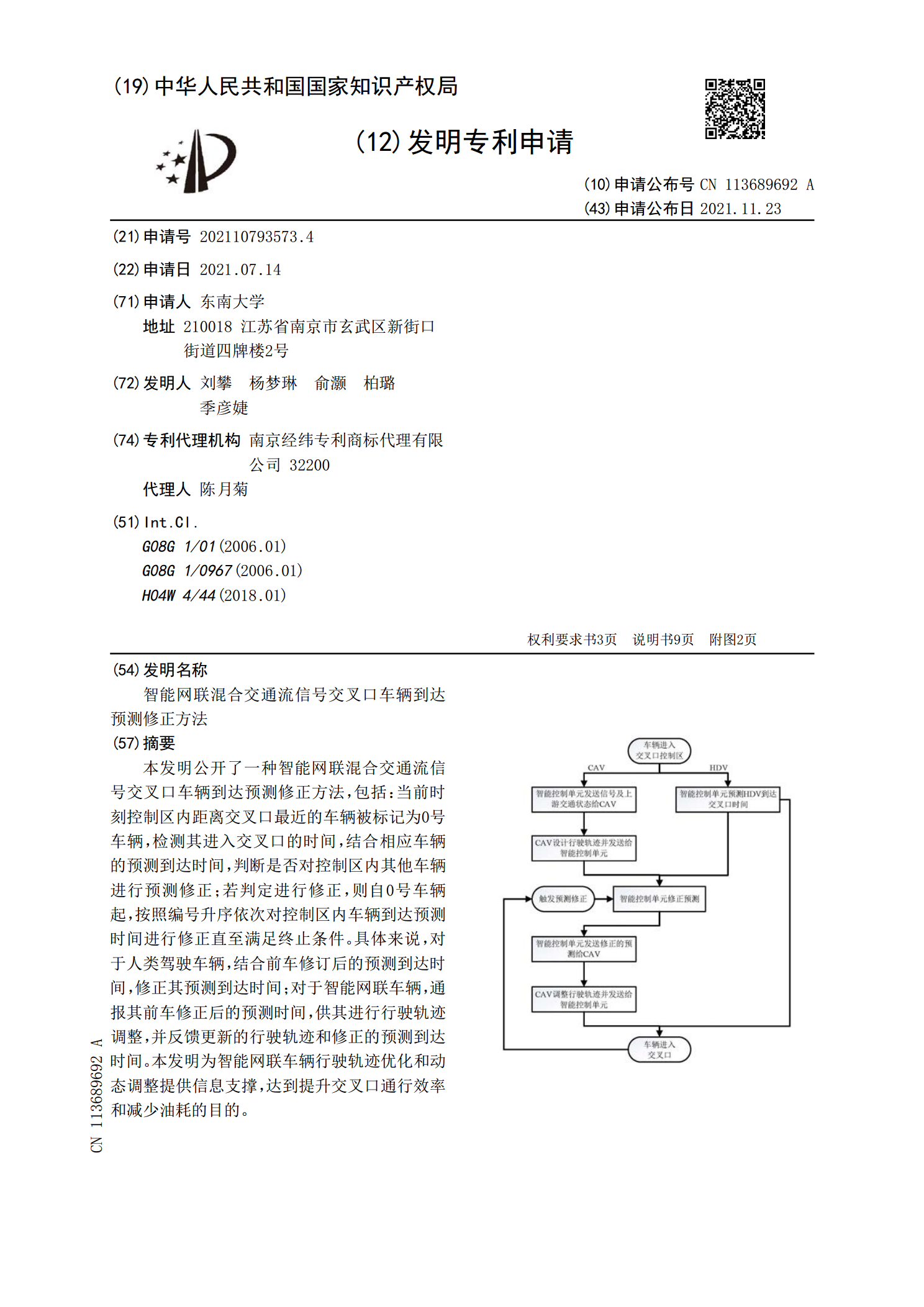
本发明公开了一种智能网联混合交通流信号交叉口车辆到达预测修正方法,包括:当前时刻控制区内距离交叉口最近的车辆被标记为0号车辆,检测其进入交叉口的时间,结合相应车辆的预测到达时间,判断是否对控制区内其他车辆进行预测修正;若判定进行修正,则自0号车辆起,按照编号升序依次对控制区内车辆到达预测时间进行修正直至满足终止条件。具体来说,对于人类驾驶车辆,结合前车修订后的预测到达时间,修正其预测到达时间;对于智能网联车辆,通报其前车修正后的预测时间,供其进行行驶轨迹调整,并反馈更新的行驶轨迹和修正的预测到达时间。本发

智能网联车辆快速通行的实现方法、装置及电子设备.pdf
本发明提供一种智能网联车辆快速通行的实现方法、装置及电子设备,该方法包括:通过车辆上的车载电子标签,向ETC系统的出口端路侧单元广播车辆行驶信息;并根据所述车辆行驶信息,向ETC系统的出口端路侧单元发送本车的历史行驶路径信息;还在接收到所述出口端路侧单元响应于所述历史行驶路径信息而发出的支付消息后,发出支付提示信号。该方法通过车载电子标签与ETC系统中入口端和出口端路侧单元的通信及信息交互,可以实现预先进行行车费计算和完成行车费预付过程,使得车辆可快速通行,基本做到随停随走,甚至可以不用停车,不再需要用户

无信号交叉口车辆调度方法研究.docx
无信号交叉口车辆调度方法研究无信号交叉口车辆调度方法研究摘要:随着城市化进程的不断推进,交通拥堵问题日益严重,特别是交叉口问题是导致交通拥堵的主要瓶颈之一。在无信号交叉口,如果车辆的行驶和调度不合理,容易形成交通阻塞,进而影响整个道路网络的流畅性。因此,本文将深入研究无信号交叉口车辆调度方法,以期提高交通效率,减少交通拥堵。关键词:无信号交叉口、车辆调度、交通拥堵、交通效率一、引言交通拥堵不仅是城市发展过程中普遍面临的问题,也是现代社会发展的一个重要挑战。交叉口作为交通系统中的瓶颈,交通拥堵的源头往往出现