
一种基于虚拟阵列天线协作波束成形的无人机中继通信方法.pdf

霞英****娘子


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于虚拟阵列天线协作波束成形的无人机中继通信方法.pdf
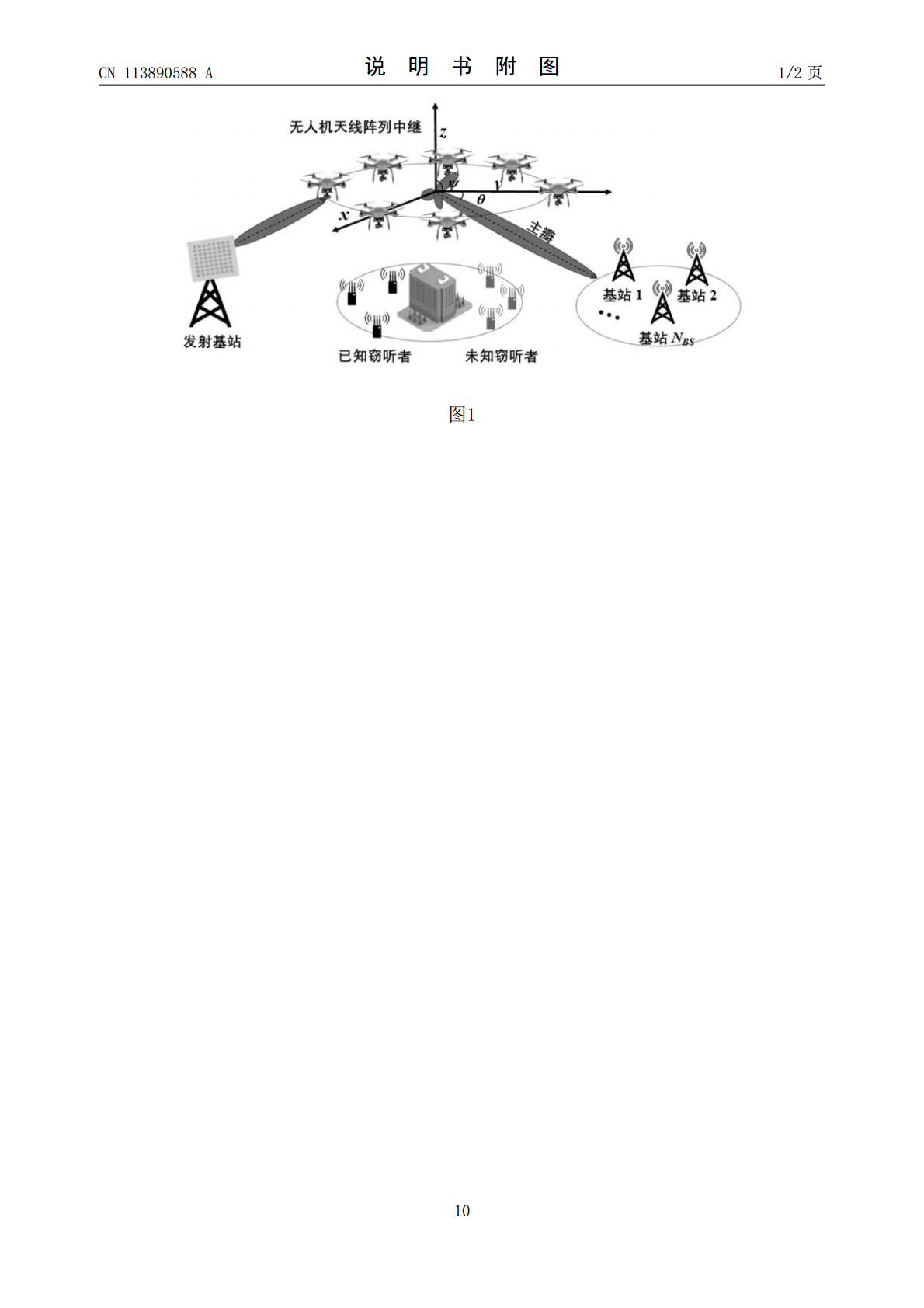
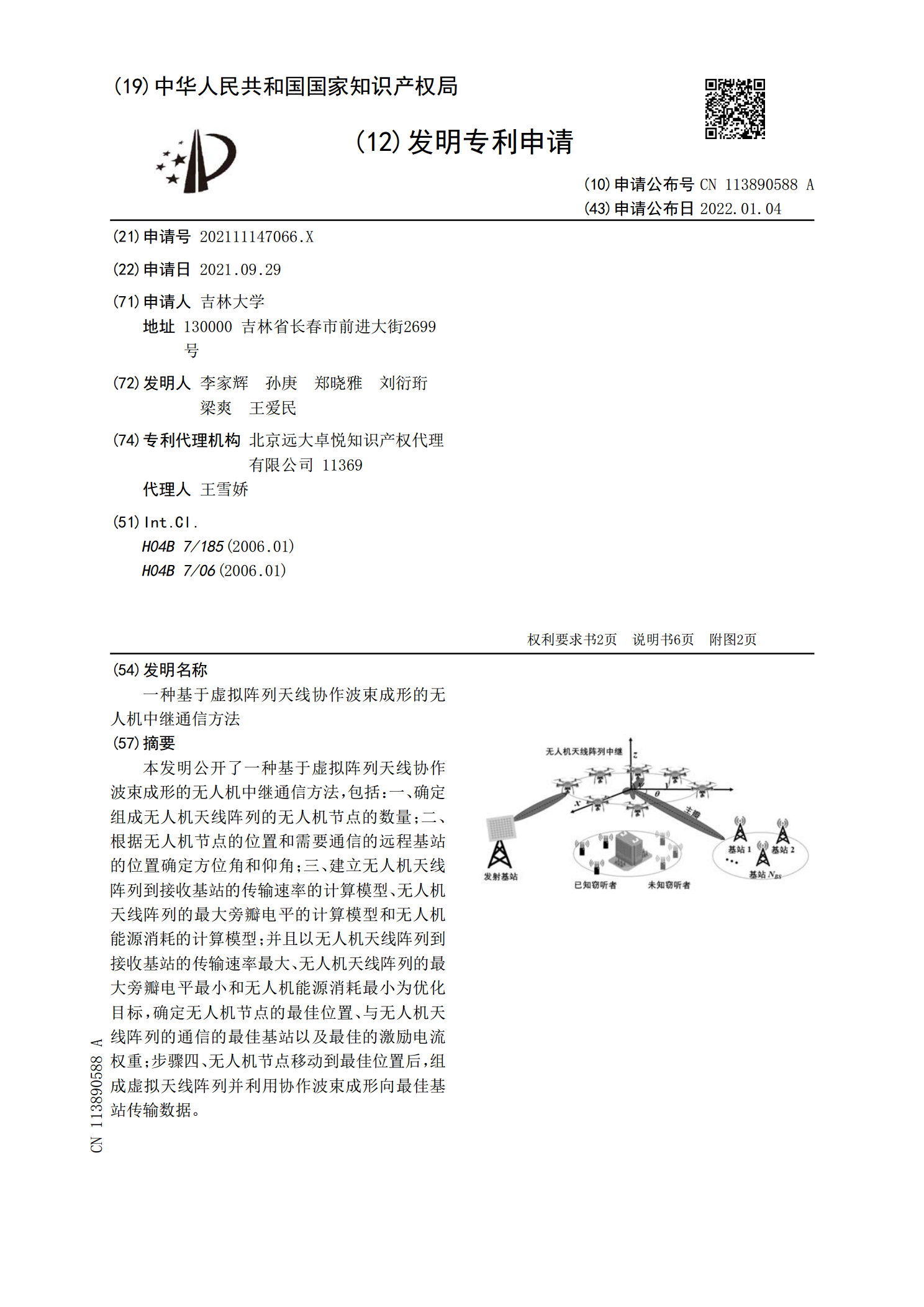
本发明公开了一种基于虚拟阵列天线协作波束成形的无人机中继通信方法,包括:一、确定组成无人机天线阵列的无人机节点的数量;二、根据无人机节点的位置和需要通信的远程基站的位置确定方位角和仰角;三、建立无人机天线阵列到接收基站的传输速率的计算模型、无人机天线阵列的最大旁瓣电平的计算模型和无人机能源消耗的计算模型;并且以无人机天线阵列到接收基站的传输速率最大、无人机天线阵列的最大旁瓣电平最小和无人机能源消耗最小为优化目标,确定无人机节点的最佳位置、与无人机天线阵列的通信的最佳基站以及最佳的激励电流权重;步骤四、无人

一种基于高速移动通信的虚拟阵列天线信号产生方法.pdf
本发明公开一种基于高速移动通信的虚拟阵列天线信号产生方法,其将单天线接收到的单组I、Q信号,通过移相和均匀相位间隔抽样,获得了N个阵元的虚拟阵列天线信号,然后通过对虚拟的阵列信号进行波束合成,使得通信系统在不添加硬件资源的情况下获得了阵列增益,同时也补偿了多普勒频移。本发明利于实现优化高速移动通信性能,而又不需要增加硬件负担的方法,具有高增益和高抗干扰能力的特征。

一种基于超表面阵列的天线波束赋形方法.pdf
为了实现天线高增益、宽频带和宽角度的设计要求,本发明实例提出一种针对天线进行波束赋形的方法,该方法包括:根据天线中心频点确定超表面单元边长及相对介电常数;仿真得到该超表面单元在满足透射率要求情况下的透射相位与贴片几何参数对应表;计算得到天线的等效相位中心从而确定天线与超表面阵列之间的距离;计算得到超表面阵列的单元数N×M;根据各个超表面单元的几何位置将其分组;通过费马原理计算各个超表面单元几何位置处的相位差;根据相位差选择确定各组超表面单元的贴片几何参数;在一定范围内进行仿真优化以实现波束赋形的目标。
一种基于认知混合双向中继的波束成形方法.pdf
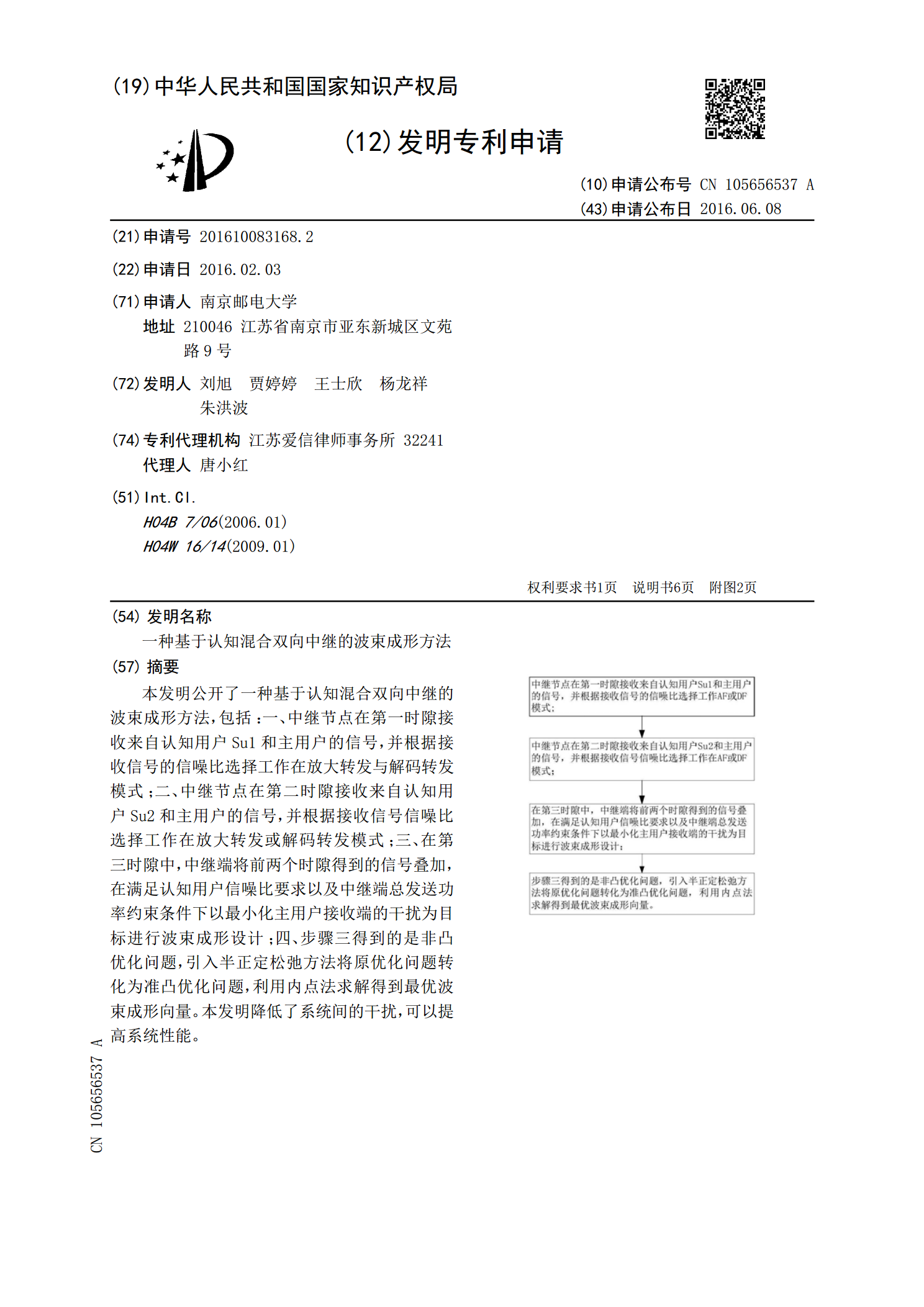
本发明公开了一种基于认知混合双向中继的波束成形方法,包括:一、中继节点在第一时隙接收来自认知用户Su1和主用户的信号,并根据接收信号的信噪比选择工作在放大转发与解码转发模式;二、中继节点在第二时隙接收来自认知用户Su2和主用户的信号,并根据接收信号信噪比选择工作在放大转发或解码转发模式;三、在第三时隙中,中继端将前两个时隙得到的信号叠加,在满足认知用户信噪比要求以及中继端总发送功率约束条件下以最小化主用户接收端的干扰为目标进行波束成形设计;四、步骤三得到的是非凸优化问题,引入半正定松弛方法将原优化问题转化

一种多中继机会波束成形方法.pdf
本发明公开了一种多中继机会波束成形方法,将发射端发送的信号通过中继放大并转发至接收端的用户;在传输数据前,系统根据用户反馈的信息选择出最优的中继与最优的用户,随后进行信息的传输;在传输过程中,为了使得系统的可达速率达到最大,系统合理地调度分配给中继的功率和分配给用户的功率。本发明提高了系统的性能饱和点,能更好地避免接收端用户接收不到数据的情况发生,提升系统的通信性能,使得该系统中的可达速率达到最大,实现高速通信。