
一种图像和激光雷达数据融合的3D目标检测方法和系统.pdf

小凌****甜蜜


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种图像和激光雷达数据融合的3D目标检测方法和系统.pdf
本发明涉及目标检测领域,具体涉及一种图像和激光雷达数据融合的3D目标检测方法和系统,包括多层卷积特征提取模块以及用于交并比计算和归一化距离的预处理模块,具体步骤如下:S1,通过检测算法计算车辆获取的目标相机图像和激光雷达点云信息,得到目标的二维矩阵框的交点坐标和置信度以及三维立体框的交点坐标和置信度;S2,将三维立体框的交点坐标投影到图像平面上,通过预处理模块计算二维矩阵框的交并比和归一化距离;S3,构建特征矩阵;S4,将特征矩阵代入到多层卷积特征提取模块,并且通过非极大抑制操作得到最后的三维目标坐标信息

一种激光雷达和图像融合的塔吊环境目标检测方法及系统.pdf
本发明提供一种激光雷达和图像融合的塔吊环境目标检测方法及系统,该方法包括构建相机和激光雷达的联合标定模型,对相机内参数、相机与激光雷达之间的外参数进行标定,采用目标检测网络对获取到的图像信息进行二维图像目标检测并得到二维目标物检测框,将三维点云数据投影到二维图像当中,对落入二维目标物检测框中的相应目标点云数据进行提取,并对目标点云数据进行聚类、精分割以及筛选,判断目标物与塔吊的距离是否为安全距离,当检测到目标物小于安全距离时输出报警信息。本发明的系统应用于上述的方法。应用本发明在施工工地的塔吊上对目标物进

一种基于雷达和图像数据融合检测的防御方法及系统.pdf
一种基于雷达和图像数据融合检测的防御方法,包括:S1,在自动驾驶正常运行过程中,对摄像机进行致盲攻击;S2,自动驾驶的离线平台对数据进行采集,并进行攻击检测;S3,经过主系统确认存在攻击,自动驾驶的离线平台重新进行training部署;S4,自动驾驶的在线平台,利用新的模型进行目标检测,从而达到防御效果。本发明还包括一种基于雷达和图像数据融合检测的防御系统,由依次连接的攻击检测模块、training重部署模块、目标检测模块组成。本发明利用了可以调节大小、位置、亮度的光斑,仿真进行致盲攻击,仿真实验结果说明
一种基于点云数据与图像数据融合的3D目标检测方法.pdf
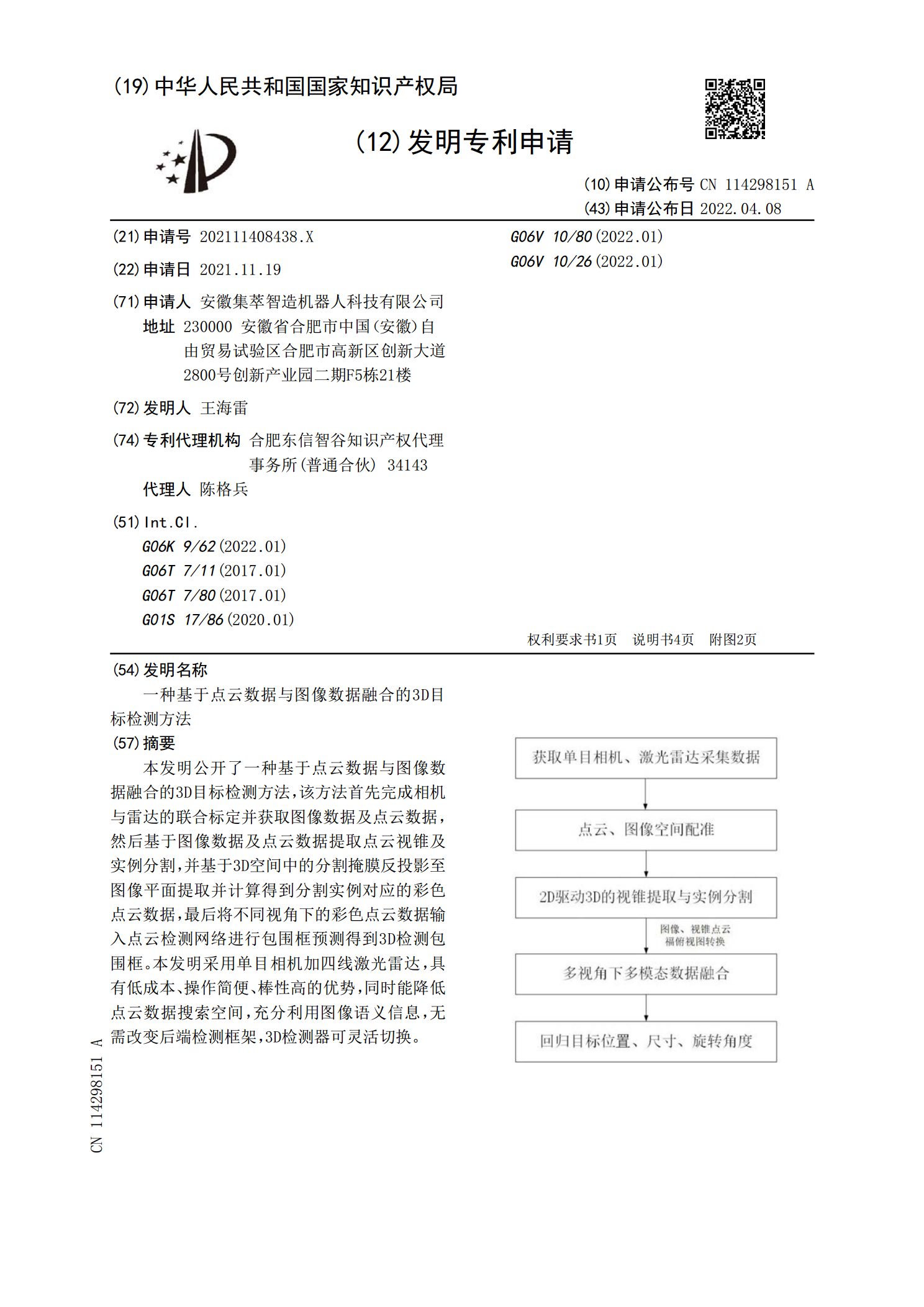
本发明公开了一种基于点云数据与图像数据融合的3D目标检测方法,该方法首先完成相机与雷达的联合标定并获取图像数据及点云数据,然后基于图像数据及点云数据提取点云视锥及实例分割,并基于3D空间中的分割掩膜反投影至图像平面提取并计算得到分割实例对应的彩色点云数据,最后将不同视角下的彩色点云数据输入点云检测网络进行包围框预测得到3D检测包围框。本发明采用单目相机加四线激光雷达,具有低成本、操作简便、棒性高的优势,同时能降低点云数据搜索空间,充分利用图像语义信息,无需改变后端检测框架,3D检测器可灵活切换。

一种激光雷达和相机融合测距方法及系统.pdf
本发明公开了一种激光雷达和相机融合测距方法,包括:获取待测目标的激光雷达数据和相机数据;将待测目标分离为单激光雷达目标、单相机目标和激光雷达相机融合目标;基于激光雷达数据,获取地面的三维点云数据,获取地面特征点信息,生成地面的虚拟点云,对地面的虚拟点云进行线性插值,得到完整的路面信息,将路面信息投影到相机图像上,根据目标像素值与路面点云像素值,计算得到各单相机目标的距离值;合并单相机目标的距离值、单激光雷达目标的距离值、激光雷达相机融合目标的距离值。本发明能够解决无人矿卡障碍物检测中对小型障碍物检测距离不