
基于改进谐波电压补偿的永磁同步电机电流谐波抑制方法.pdf

盼易****君a

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进谐波电压补偿的永磁同步电机电流谐波抑制方法.pdf
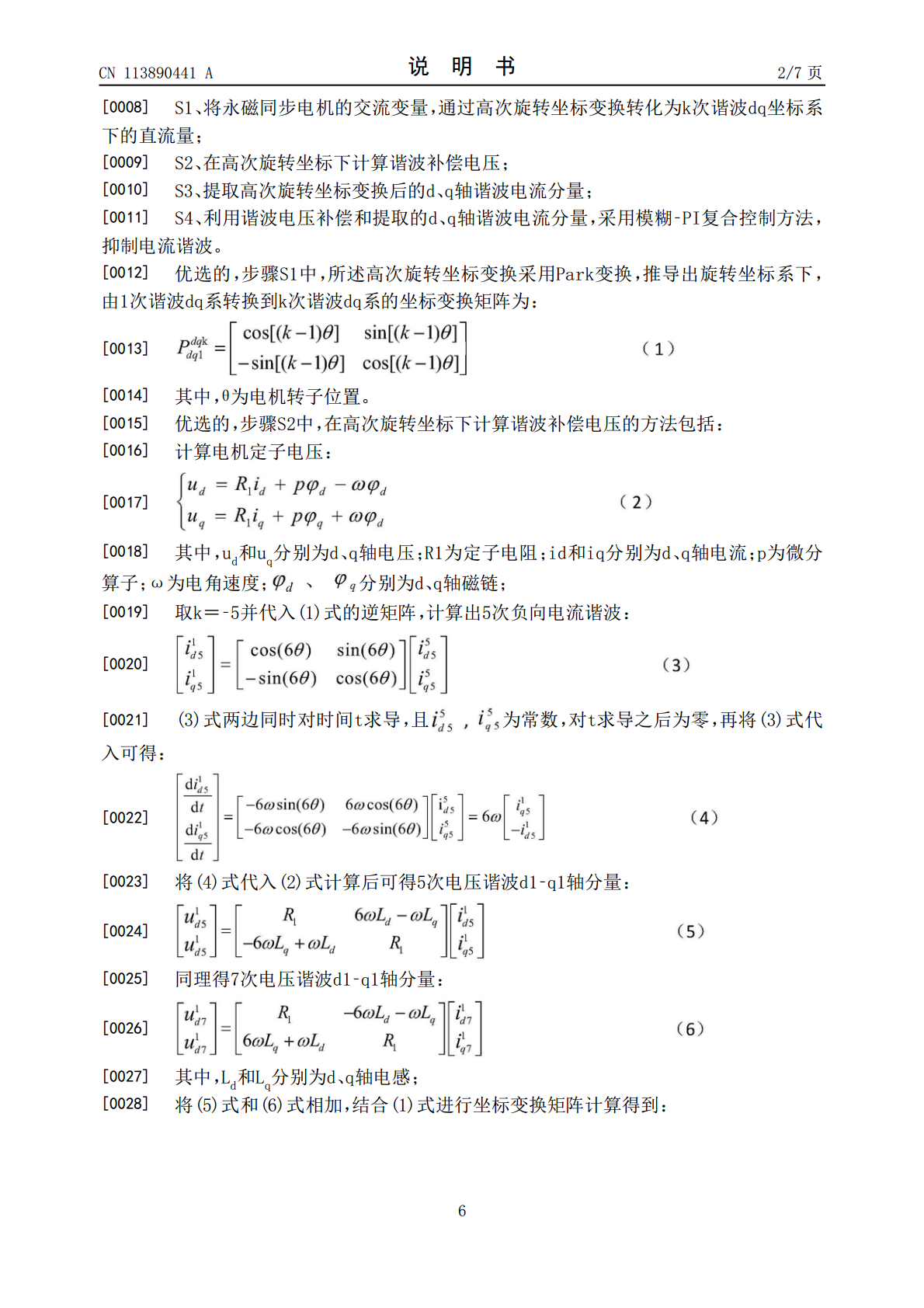
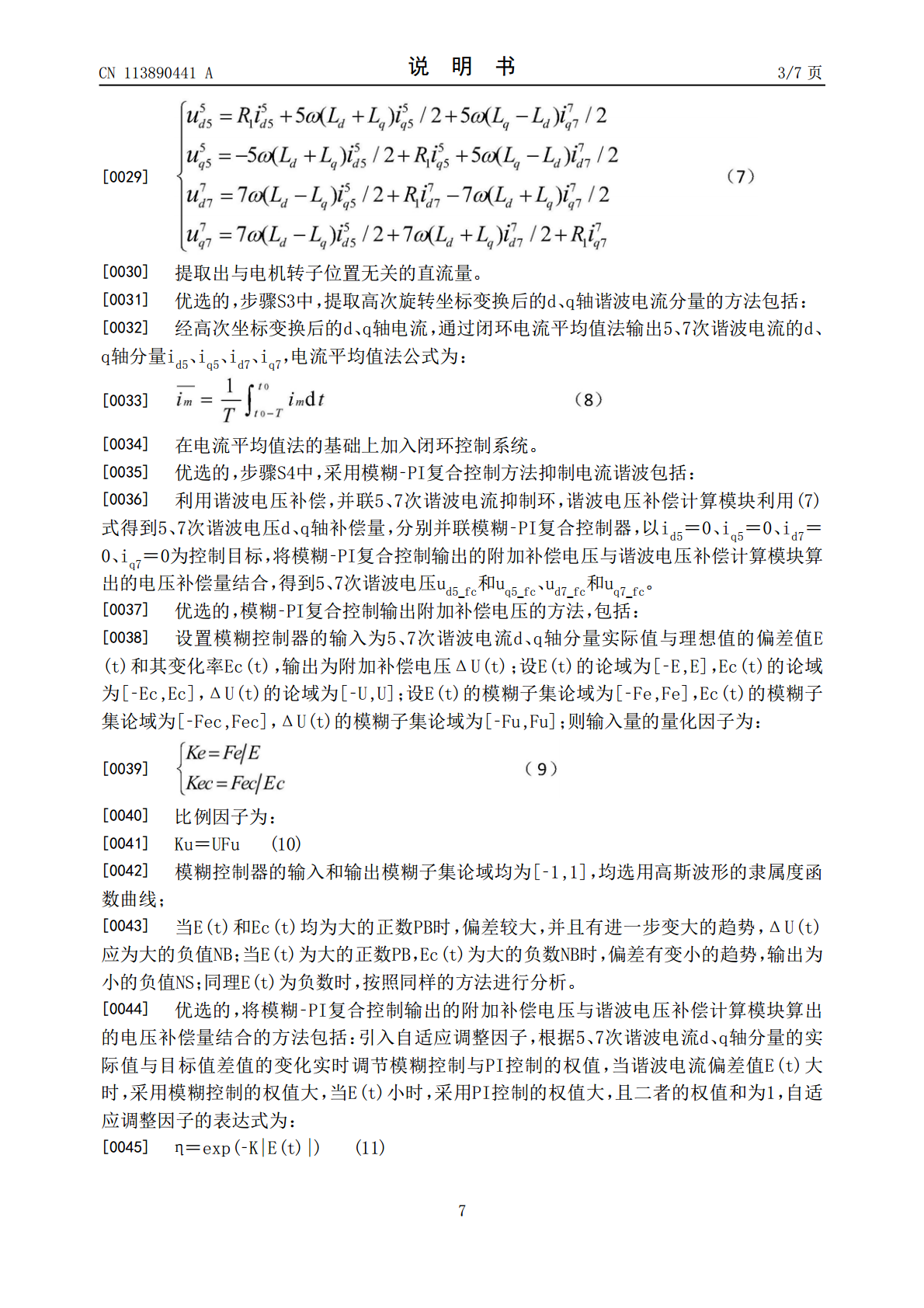
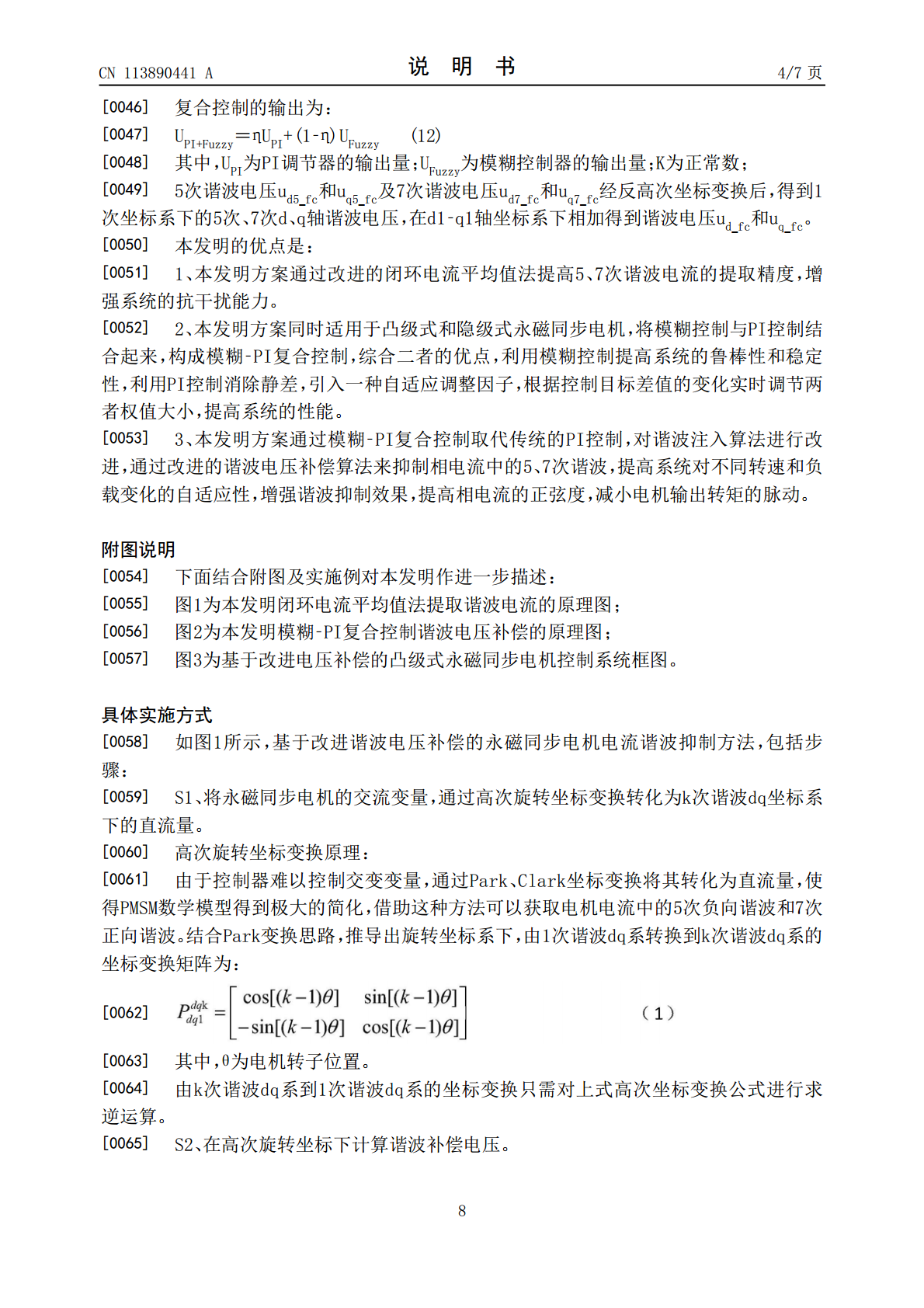
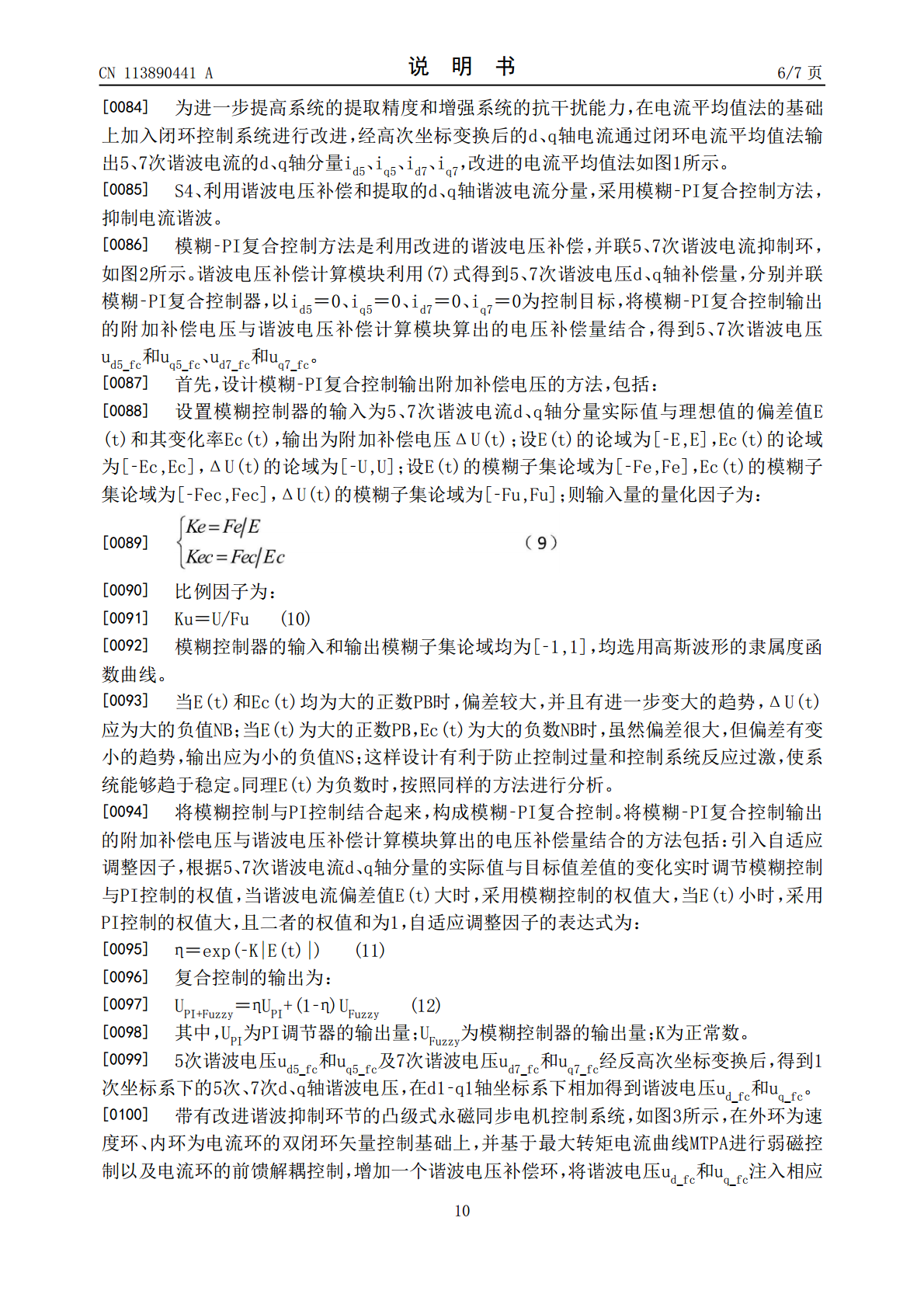
本发明公开了基于改进谐波电压补偿的永磁同步电机电流谐波抑制方法,将永磁同步电机的交流变量,通过高次旋转坐标变换转化为k次谐波dq坐标系下的直流量;在高次旋转坐标下计算谐波补偿电压;提取高次旋转坐标变换后的d、q轴谐波电流分量;利用谐波电压补偿和d、q轴谐波电流分量,采用模糊‑PI复合控制方法,抑制电流谐波。本发明通过改进的闭环电流平均值法提高5、7次谐波电流的提取精度,增强系统的抗干扰能力,将模糊控制与PI控制结合起来,构成模糊‑PI复合控制,利用模糊控制提高系统的鲁棒性和稳定性,利用PI控制消除静差,引

基于改进电压补偿的永磁同步电机谐波抑制策略.docx
基于改进电压补偿的永磁同步电机谐波抑制策略基于改进电压补偿的永磁同步电机谐波抑制策略摘要:永磁同步电机在工业和交通领域得到广泛应用。然而,永磁同步电机的谐波问题一直是一大挑战,对其运行稳定性和性能产生了不良影响。本文提出了一种改进的电压补偿策略,旨在有效抑制永磁同步电机的谐波。该策略基于对电压波形进行分析和优化,通过引入合理的补偿电压,实现了对谐波的抑制。仿真结果表明,该策略能够显著降低永磁同步电机的谐波含量,提高其运行稳定性和效率。关键词:永磁同步电机,谐波,电压补偿,优化1.引言永磁同步电机具有体积小

基于前馈补偿的永磁同步电机谐波抑制方法.docx
基于前馈补偿的永磁同步电机谐波抑制方法摘要本文研究了基于前馈补偿的永磁同步电机谐波抑制方法,首先介绍了永磁同步电机的工作原理及其存在的谐波问题,随后分析了当前常用的谐波抑制方法的优缺点。针对这些问题,提出了基于前馈补偿的永磁同步电机谐波抑制方法,该方法能够有效抑制永磁同步电机的谐波,提高其运行效率和稳定性。最后,通过仿真实验验证了该方法的有效性和可行性。关键词:永磁同步电机,谐波抑制,前馈补偿,效率,稳定性。AbstractThispaperstudiestheharmonicsuppressionmet

基于级联型SOGI的永磁同步电机谐波电流抑制方法研究.docx
基于级联型SOGI的永磁同步电机谐波电流抑制方法研究基于级联型SOGI的永磁同步电机谐波电流抑制方法研究摘要:永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)具有高效率、高功率密度和良好的动态响应等优点,在工业应用中得到了广泛的应用。然而,由于PMSM非线性和参数不确定性等问题,谐波电流的生成成为了其运行中的一个难点。为了降低PMSM谐波电流对系统性能的不利影响,本文研究了基于级联型SOGI的谐波电流抑制方法。首先,介绍了PMSM的特点和谐波电流对系统的影响。PMS

基于改进型重复控制器的永磁同步电机电流谐波抑制方法研究.docx
基于改进型重复控制器的永磁同步电机电流谐波抑制方法研究基于改进型重复控制器的永磁同步电机电流谐波抑制方法研究摘要:永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)具有高效、高性能等优点,已广泛应用于工业自动化系统中。然而,由于其磁链波形和电流波形存在谐波成分,会导致电机的振动、损耗增加等问题。为了解决这些问题,本文提出了一种基于改进型重复控制器的永磁同步电机电流谐波抑制方法。通过改进重复控制器的结构和算法,实现对永磁同步电机电流谐波的有效抑制。仿真实验结果表明,该方