
基于多模态的移动目标实时跟踪定位系统和方法.pdf

玉怡****文档

1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多模态的移动目标实时跟踪定位系统和方法.pdf
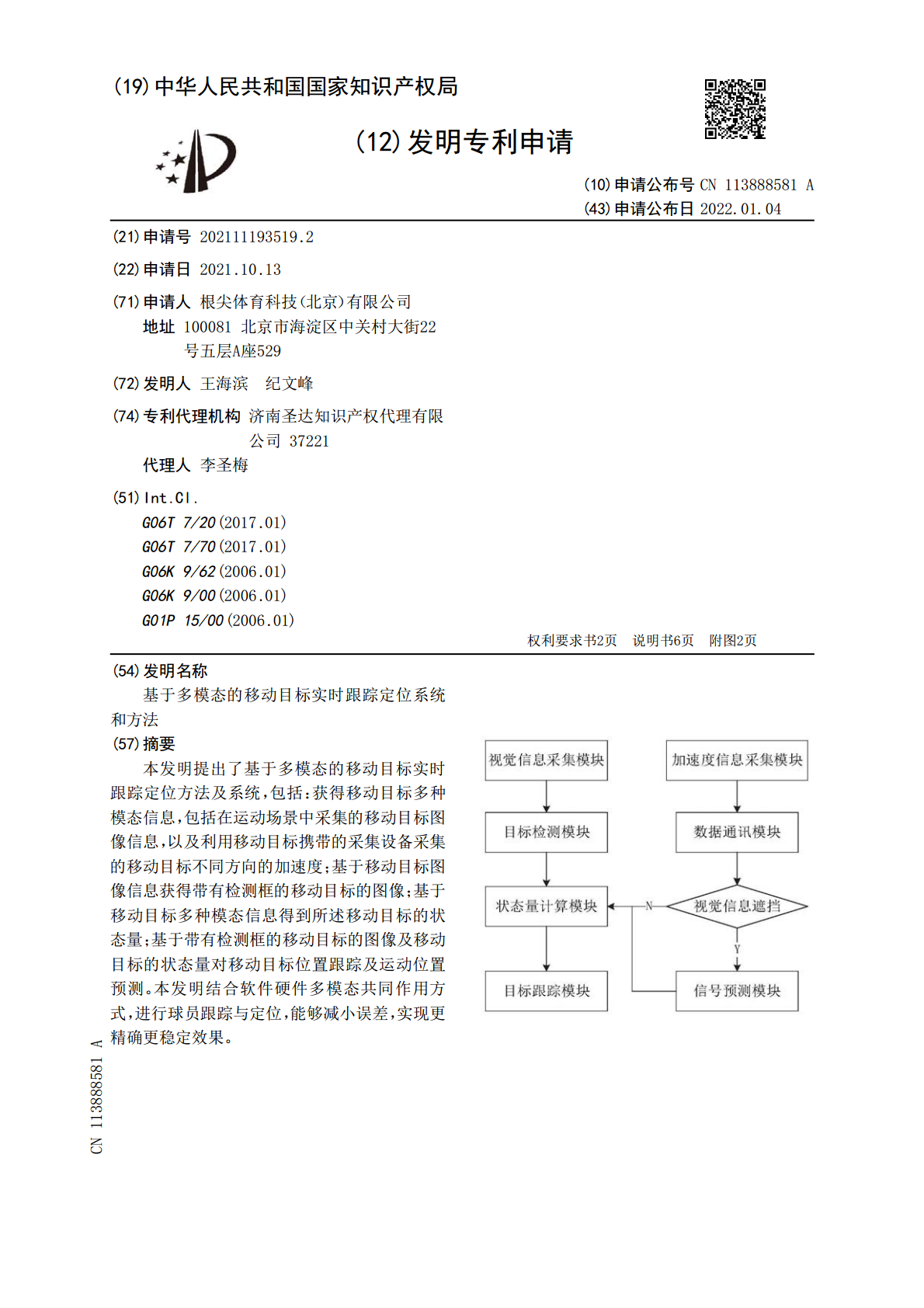
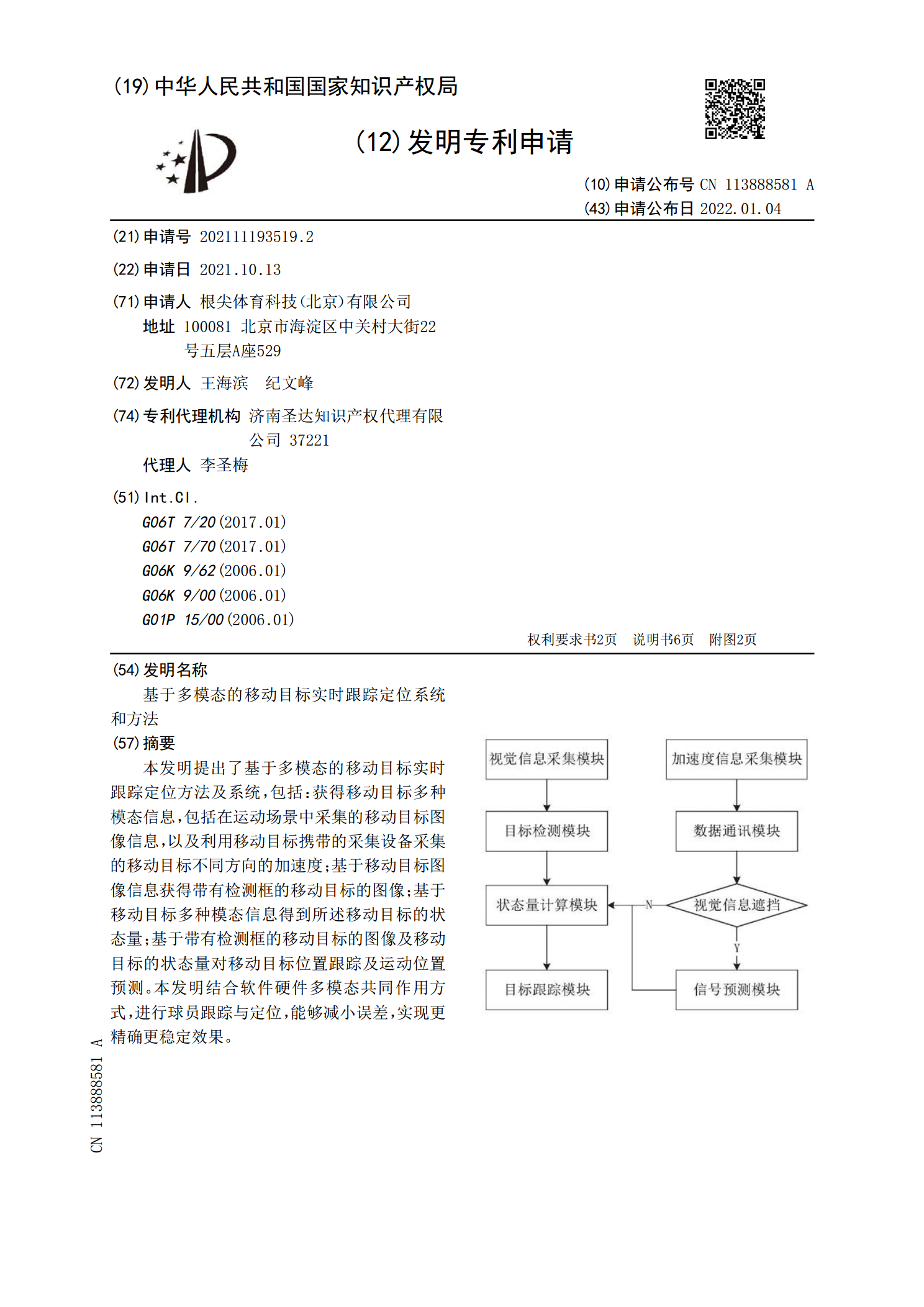
本发明提出了基于多模态的移动目标实时跟踪定位方法及系统,包括:获得移动目标多种模态信息,包括在运动场景中采集的移动目标图像信息,以及利用移动目标携带的采集设备采集的移动目标不同方向的加速度;基于移动目标图像信息获得带有检测框的移动目标的图像;基于移动目标多种模态信息得到所述移动目标的状态量;基于带有检测框的移动目标的图像及移动目标的状态量对移动目标位置跟踪及运动位置预测。本发明结合软件硬件多模态共同作用方式,进行球员跟踪与定位,能够减小误差,实现更精确更稳定效果。

基于可靠相关度的实时多模态目标跟踪方法.docx
基于可靠相关度的实时多模态目标跟踪方法基于可靠相关度的实时多模态目标跟踪方法摘要:多模态目标跟踪在计算机视觉领域中具有重要的应用价值。然而,由于多模态数据的复杂性和时变性,实时多模态目标跟踪仍然面临着许多挑战。本文提出了一种基于可靠相关度的实时多模态目标跟踪方法。通过将多模态数据拆分为可靠相关度和不可靠相关度两个部分,并根据可靠相关度的权重进行加权融合,提高多模态目标的跟踪性能。通过实验证明,所提出的方法在真实场景中能够实时、准确地跟踪多模态目标。关键词:多模态目标跟踪;可靠相关度;实时性;准确性1.引言

基于多模态数据的目标跟踪算法.pptx
汇报人:CONTENTSPARTONEPARTTWO定义与背景算法目标与任务算法流程PARTTHREE数据来源与类型数据预处理特征提取与表示数据融合策略PARTFOUR目标检测特征提取与匹配运动模型与预测数据更新与优化PARTFIVE评估指标实验设置与数据集结果对比与分析性能优化与改进PARTSIX视频监控与安全智能交通与车辆跟踪人脸识别与行为分析其他应用领域与优势PARTSEVEN算法改进与创新数据隐私与安全问题跨模态数据融合与处理实际应用中的挑战与解决方案汇报人:
多模态目标识别方法和系统.pdf
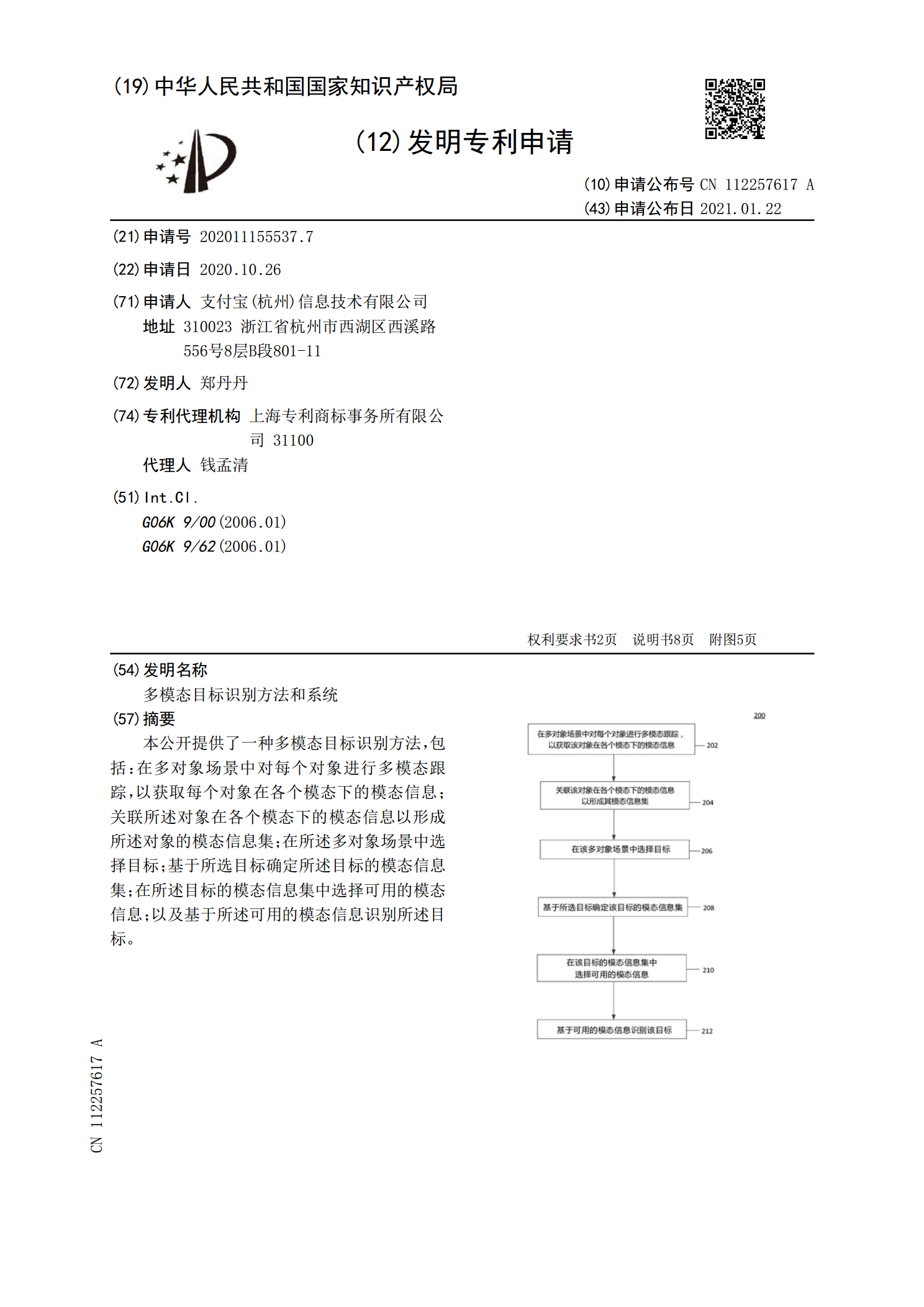
本公开提供了一种多模态目标识别方法,包括:在多对象场景中对每个对象进行多模态跟踪,以获取每个对象在各个模态下的模态信息;关联所述对象在各个模态下的模态信息以形成所述对象的模态信息集;在所述多对象场景中选择目标;基于所选目标确定所述目标的模态信息集;在所述目标的模态信息集中选择可用的模态信息;以及基于所述可用的模态信息识别所述目标。

基于多模态视觉数据融合的目标跟踪方法研究的开题报告.docx
基于多模态视觉数据融合的目标跟踪方法研究的开题报告开题报告一、研究背景目标跟踪是计算机视觉中的一个重要研究方向,广泛应用于智能监控、自动驾驶、机器人等领域。在实际应用场景中,多种传感器数据以及不同来源的视觉信息可以同时得到,因此基于多模态视觉数据融合的目标跟踪方法成为了研究的热点。数据融合可以提高目标跟踪的准确性、稳定性以及鲁棒性,同时还可以减少假阳性和假阴性的发生。二、研究意义当前,大多数目标跟踪算法主要是基于单一传感器,如单目视觉、激光雷达等。但是单一传感器的数据存在一定的局限性,如单目视觉易受到光照