
一种基于智能预测控制的水面无人船路径跟踪方法.pdf

玄静****写意

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于智能预测控制的水面无人船路径跟踪方法.pdf
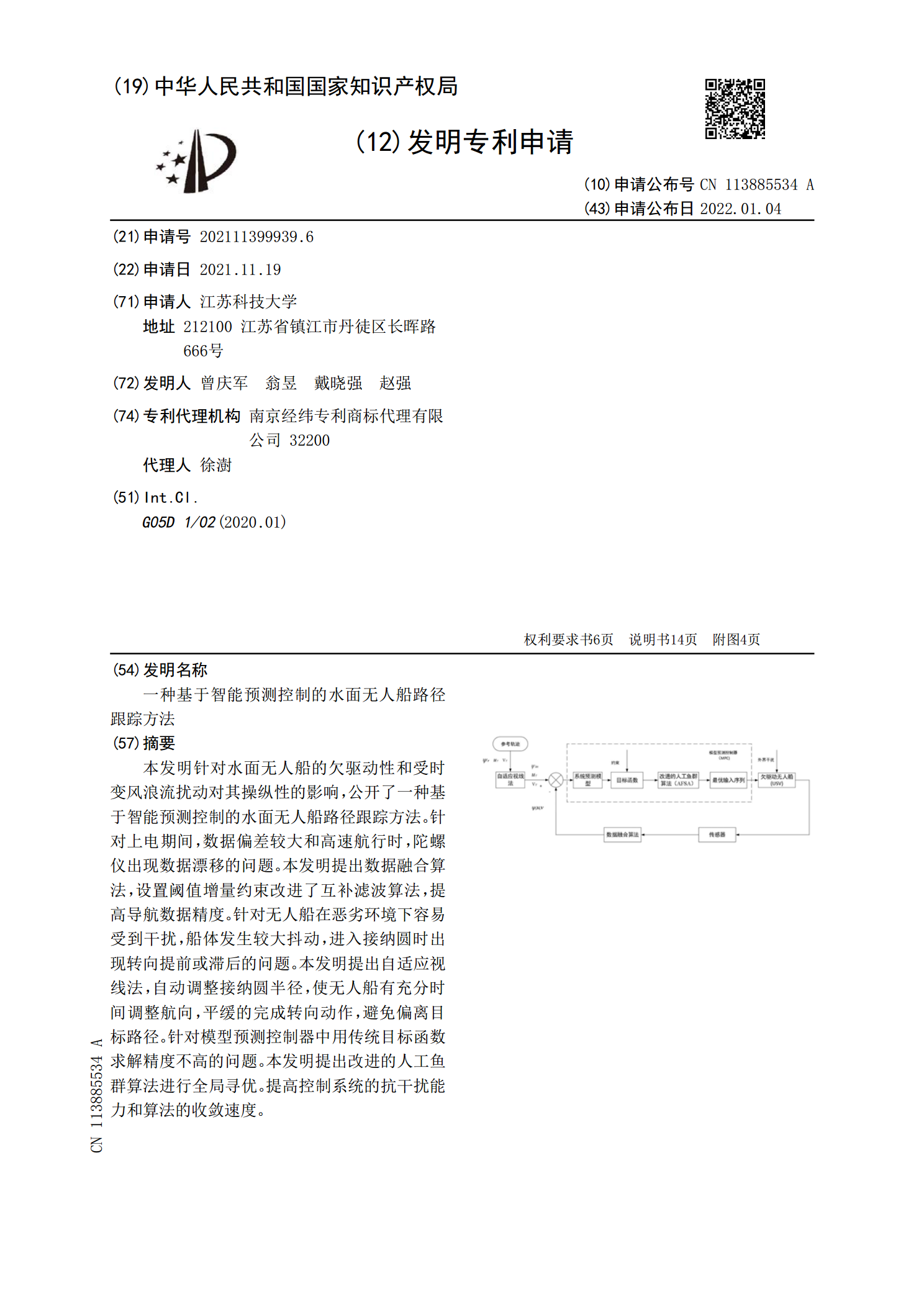
本发明针对水面无人船的欠驱动性和受时变风浪流扰动对其操纵性的影响,公开了一种基于智能预测控制的水面无人船路径跟踪方法。针对上电期间,数据偏差较大和高速航行时,陀螺仪出现数据漂移的问题。本发明提出数据融合算法,设置阈值增量约束改进了互补滤波算法,提高导航数据精度。针对无人船在恶劣环境下容易受到干扰,船体发生较大抖动,进入接纳圆时出现转向提前或滞后的问题。本发明提出自适应视线法,自动调整接纳圆半径,使无人船有充分时间调整航向,平缓的完成转向动作,避免偏离目标路径。针对模型预测控制器中用传统目标函数求解精度不高

基于自抗扰的无人水面艇路径跟踪控制研究.docx
基于自抗扰的无人水面艇路径跟踪控制研究一、概要随着科技的不断发展,无人水面艇在军事、海洋资源开发和环境监测等领域的应用越来越广泛。然而由于水下环境的复杂性和无人水面艇本身的固有特性,其路径跟踪控制面临着诸多挑战。为了提高无人水面艇的路径跟踪精度和稳定性,本文针对这一问题进行了深入研究。首先本文对无人水面艇的路径跟踪控制进行了系统性的梳理,分析了现有方法的优缺点以及存在的问题。在此基础上,提出了一种基于自抗扰的无人水面艇路径跟踪控制方法。该方法通过引入自抗扰机制,有效地降低了干扰对无人水面艇路径跟踪的影响,

基于无人测试船水面路径规划策略.pptx
汇报人:CONTENTSPARTONEPARTTWO无人测试船的定义和功能路径规划在无人测试船中的应用无人测试船水面路径规划的挑战PARTTHREE基于全局路径规划的策略基于局部路径规划的策略路径规划策略的比较和选择PARTFOUR传感器融合技术障碍物规避技术动态环境建模技术路径优化技术PARTFIVE无人测试船水面路径规划的实际应用典型案例分析实践经验总结与展望PARTSIX无人测试船水面路径规划技术的未来发展趋势无人测试船水面路径规划面临的主要挑战应对挑战的策略与建议汇报人:
一种复杂海域下的水面无人艇路径跟踪控制方法.pdf
本发明涉及一种复杂海域下的水面无人艇路径跟踪控制方法,通过北斗二代、组合导航、AIS设备输出实时无人艇运动状态信息。收无人艇的运动状态信息并对未来时刻的无人艇运动状态进行预测,并将预测值与参考值的误差反馈给滚动优化部分,构造无人艇路径偏差的优化函数,最后在有状态变量和控制输入的约束条件下优化函数求最优解,采用模型预测控制算法,基于改进人工蜂群优化的约束模型预测控制,得到最优命令舵角,并输出给无人艇运动控制系统。采用基于改进人工蜂群的模型预测控制算法实现无人艇在风浪流时变干扰下能高精度地跟踪参考路径,且舵角

基于IDLOS的水面无人艇路径跟踪控制技术研究.docx
基于IDLOS的水面无人艇路径跟踪控制技术研究摘要水面无人艇作为一种新兴的无人艇,已经在海洋环境中得到了广泛的应用。为了保证无人艇的安全性和高效性,需要对其进行路径跟踪控制。本文基于IDLOS算法,研究了水面无人艇路径跟踪控制技术,通过仿真实验验证了该技术的有效性和优越性。结果表明,该方法可以在不受外界干扰的情况下实现水面无人艇的精确路径跟踪,具有很高的实用价值。关键词:水面无人艇;路径跟踪控制;IDLOS引言随着人们对深海和海洋资源的研究日渐深入,水面无人艇的应用逐渐扩大。水面无人艇不仅可以减少作业成本