
一种基于海量图像数据的舰船轨迹生成方法及系统.pdf

雨巷****怡轩

1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于海量图像数据的舰船轨迹生成方法及系统.pdf
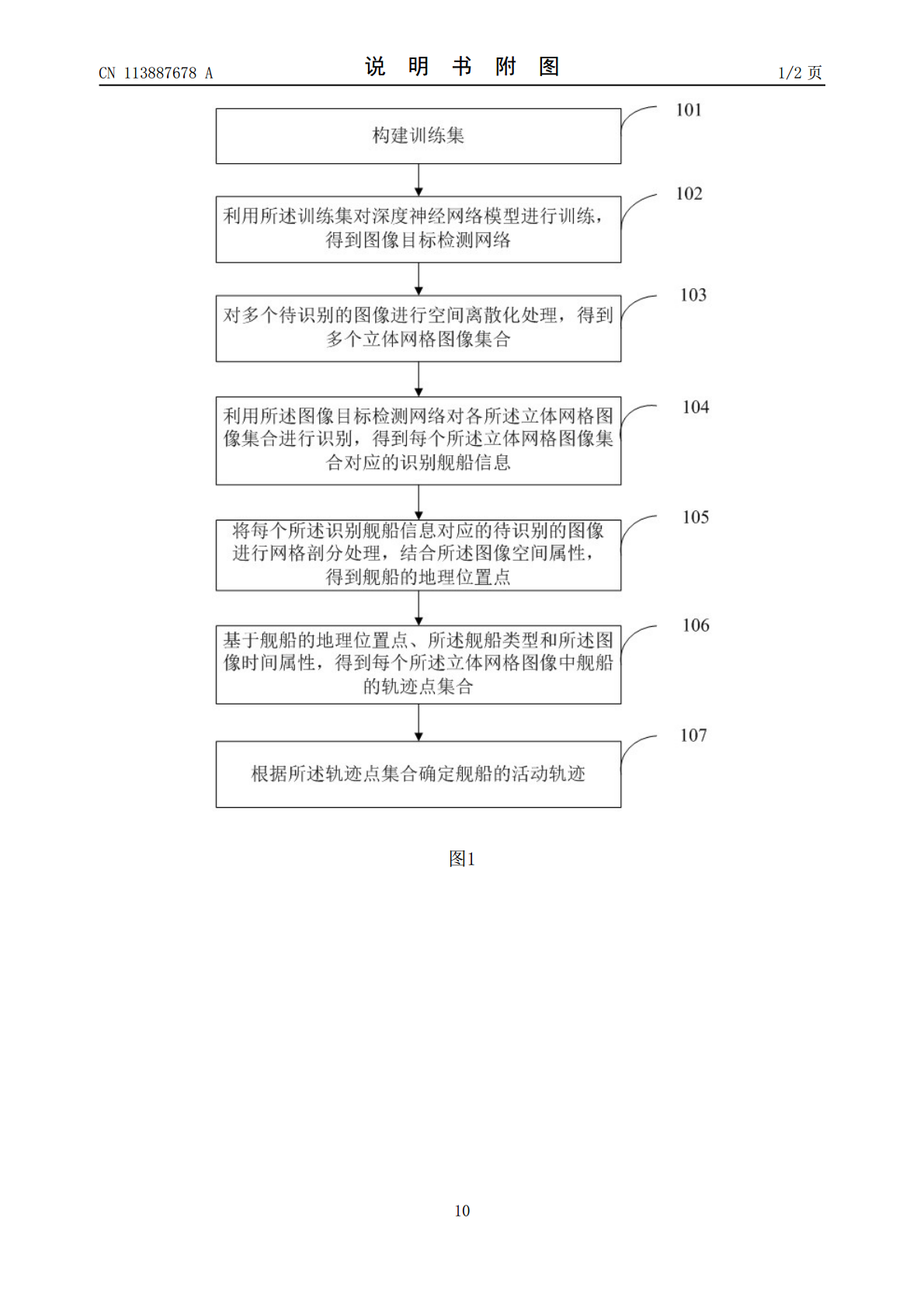
本发明涉及一种基于海量图像数据的舰船轨迹生成方法及系统。方法包括:构建训练集;利用训练集对深度神经网络模型进行训练,得到图像目标检测网络;对多个待识别的图像进行空间离散化处理,得到多个立体网格图像集合;利用图像目标检测网络对各立体网格图像集合进行识别,得到每个立体网格图像集合对应的识别舰船信息;将每个识别舰船信息对应的待识别的图像进行网格剖分处理,结合所述图像空间属性,得到舰船的地理位置点;基于舰船的地理位置点、舰船类型和图像时间属性,得到每个立体网格图像中舰船的轨迹点集合;根据轨迹点集合确定舰船的活动轨

基于海量GPS轨迹数据的路网生成方法研究.docx
基于海量GPS轨迹数据的路网生成方法研究基于海量GPS轨迹数据的路网生成方法研究摘要:随着全球定位系统(GPS)的普遍应用,我们可以收集到大规模的GPS轨迹数据,尤其是在城市交通领域。这些GPS轨迹数据对于路网的生成具有重要的作用,可以帮助我们了解城市中的交通流动性,优化交通规划以及提供更好的出行建议。本文针对基于海量GPS轨迹数据的路网生成方法展开研究,探索如何将这些数据转化为准确可靠的路网信息。关键词:GPS轨迹数据,路网生成,交通流动性,交通规划,出行建议一、引言随着城市交通问题日益突出,利用GPS

一种海量轨迹数据的热力流向图生成方法.pdf
本发明涉及智能交通和数据处理技术领域,具体地说,是一种海量轨迹数据的热力流向图生成方法,利用空间聚合技术将海量有向轨迹线聚合为有向热力点数据,并通过有向热力点数据集动态渲染方法,生成车辆轨迹的热力流向图,可以在展示不同位置车流密度的同时,利用动画效果展示出车流方向。本发明方法可以弥补现有的轨迹热力图技术在流动方向展示上的不足,也解决了直接进行海量轨迹线渲染的性能问题,将成为海量车辆轨迹数据分析与可视化有一种有力工具。
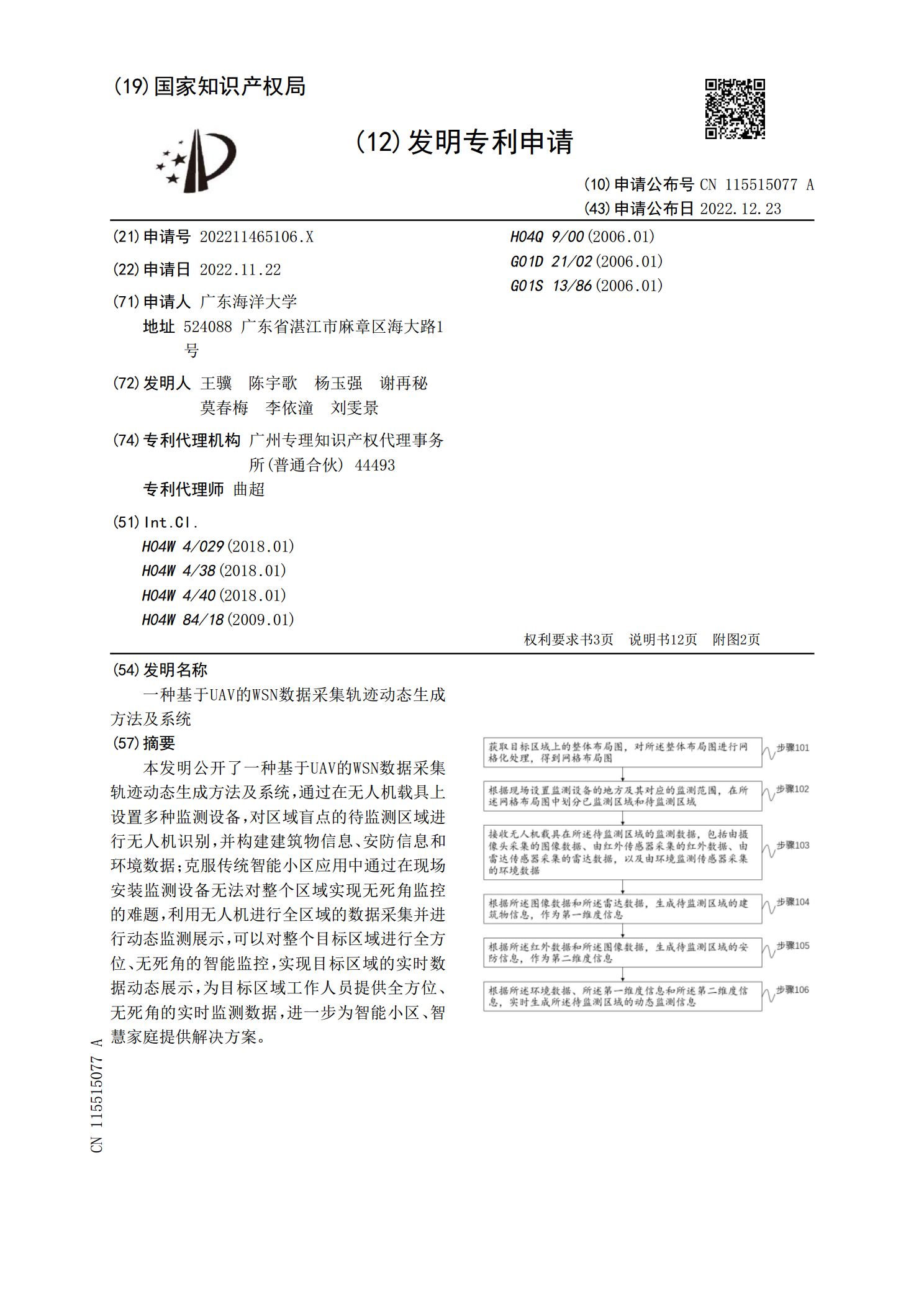
一种基于UAV的WSN数据采集轨迹动态生成方法及系统.pdf
本发明公开了一种基于UAV的WSN数据采集轨迹动态生成方法及系统,通过在无人机载具上设置多种监测设备,对区域盲点的待监测区域进行无人机识别,并构建建筑物信息、安防信息和环境数据;克服传统智能小区应用中通过在现场安装监测设备无法对整个区域实现无死角监控的难题,利用无人机进行全区域的数据采集并进行动态监测展示,可以对整个目标区域进行全方位、无死角的智能监控,实现目标区域的实时数据动态展示,为目标区域工作人员提供全方位、无死角的实时监测数据,进一步为智能小区、智慧家庭提供解决方案。

基于云平台的海量舰船图像查询研究.docx
基于云平台的海量舰船图像查询研究基于云平台的海量舰船图像查询研究摘要:随着云计算技术的发展和应用的普及,人们可以方便地存储和处理大量的数据。在海洋领域,舰船图像的数量庞大且多样,是海洋监测与管理的重要数据来源。然而,传统的海洋监测与管理方法面临着海量的舰船图像数据的查询和分析难题。为了解决这一问题,本文研究了基于云平台的海量舰船图像查询方法,并提出了一种基于深度学习的舰船图像检索框架。实验结果表明,该方法能够高效地实现海量舰船图像的查询和检索。关键词:云平台、海量舰船图像、查询、深度学习、检索一、引言随着