
用于监视机器人设备的方法和系统.pdf

岚风****55


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于监视机器人设备的方法和系统.pdf
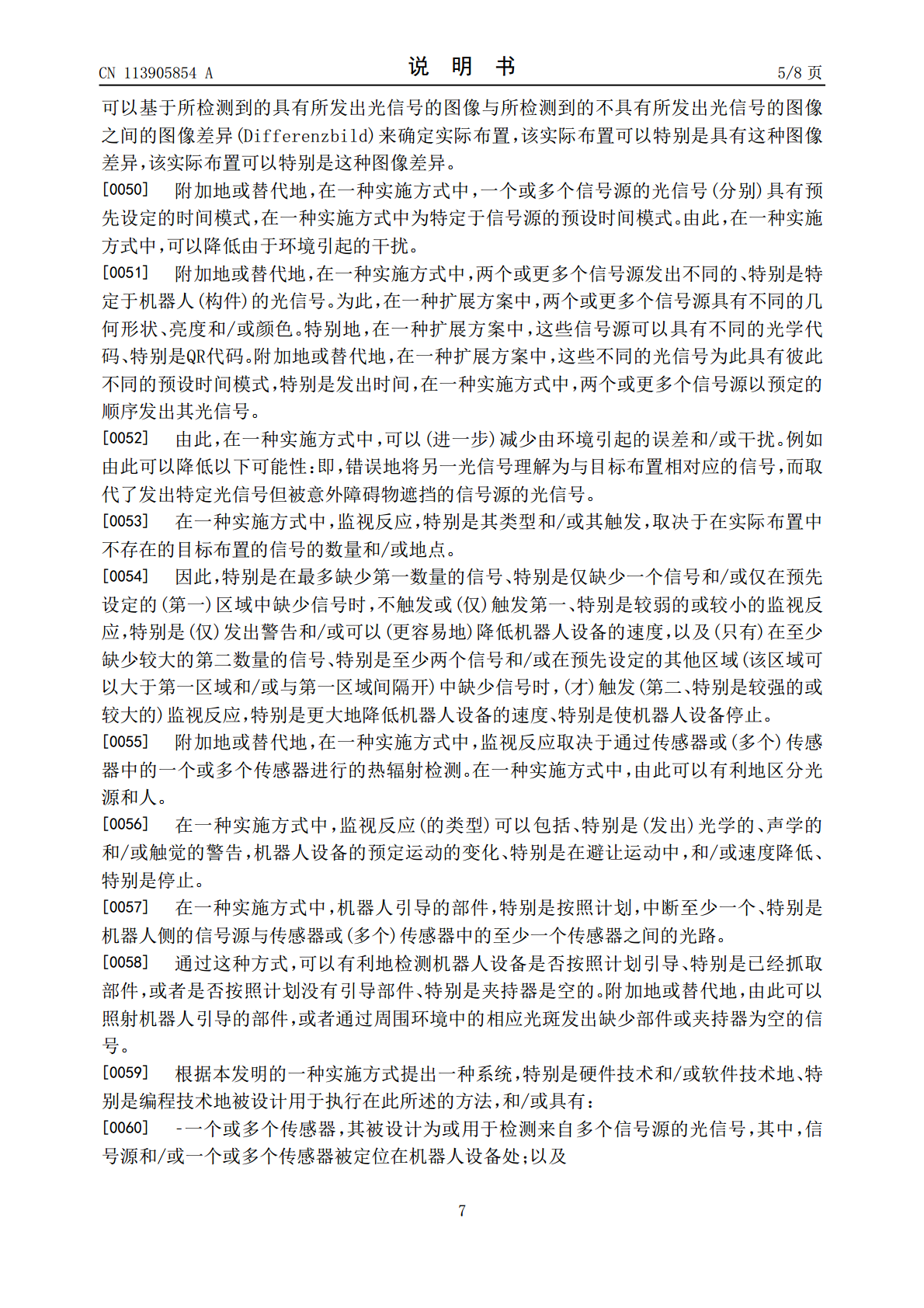
根据本发明的一种用于监视机器人设备的方法,所述机器人设备具有至少一个机器人(10),包括以下步骤:通过至少一个传感器(30‑32)检测(S10)多个信号源(20)的光信号,其中所述信号源和/或所述传感器被定位在所述机器人设备上;并且,如果所检测到的光信号的实际布置与该信号的目标布置之间的偏差超过边界值,特别是如果所检测到的光信号的实际布置中不存在所述目标布置的至少预定最小数量的信号,则触发(S50)监视反应。
用于远程射频设备监视的系统和方法.pdf
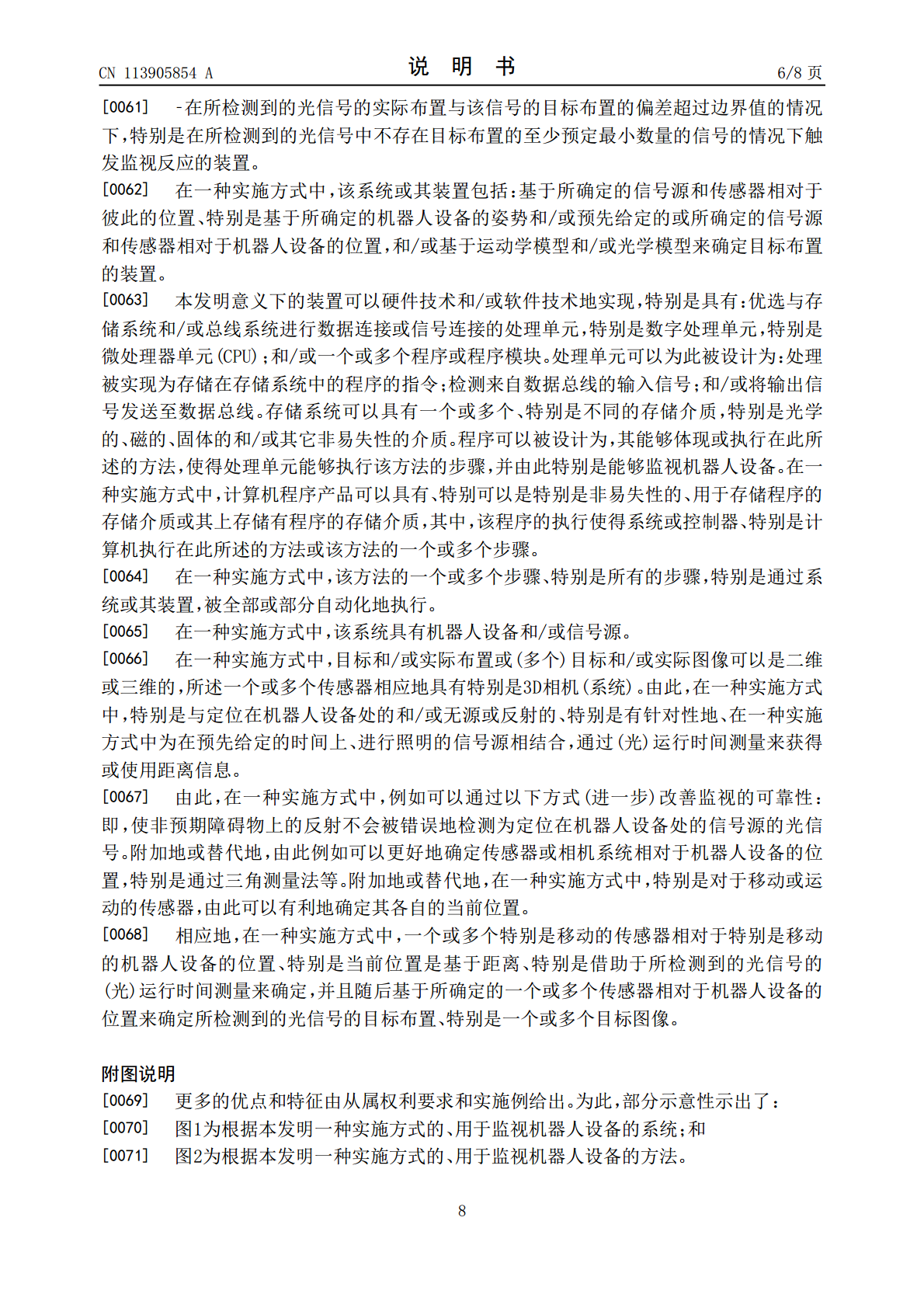
本公开提供了用于远程射频设备监视的系统和方法。在一个实施例中,RF通信系统包括:RF收发器系统;RF设备,通过线缆耦合到RF收发器系统,其中RF收发器系统被配置为经由线缆将RF信号传送到RF设备;远程测量收发器,与RF收发器系统的处理器通信;远程测量应答器,耦合在线缆和RF设备之间;其中处理器控制远程测量收发器以向远程测量应答器传送询问信号;其中远程测量应答器基于在RF设备处检测到的RF信号来确定至少一个RF设备的第一参数,并将包括测量数据的响应信号传送到远程测量收发器;其中远程测量收发器将测量数据输出到
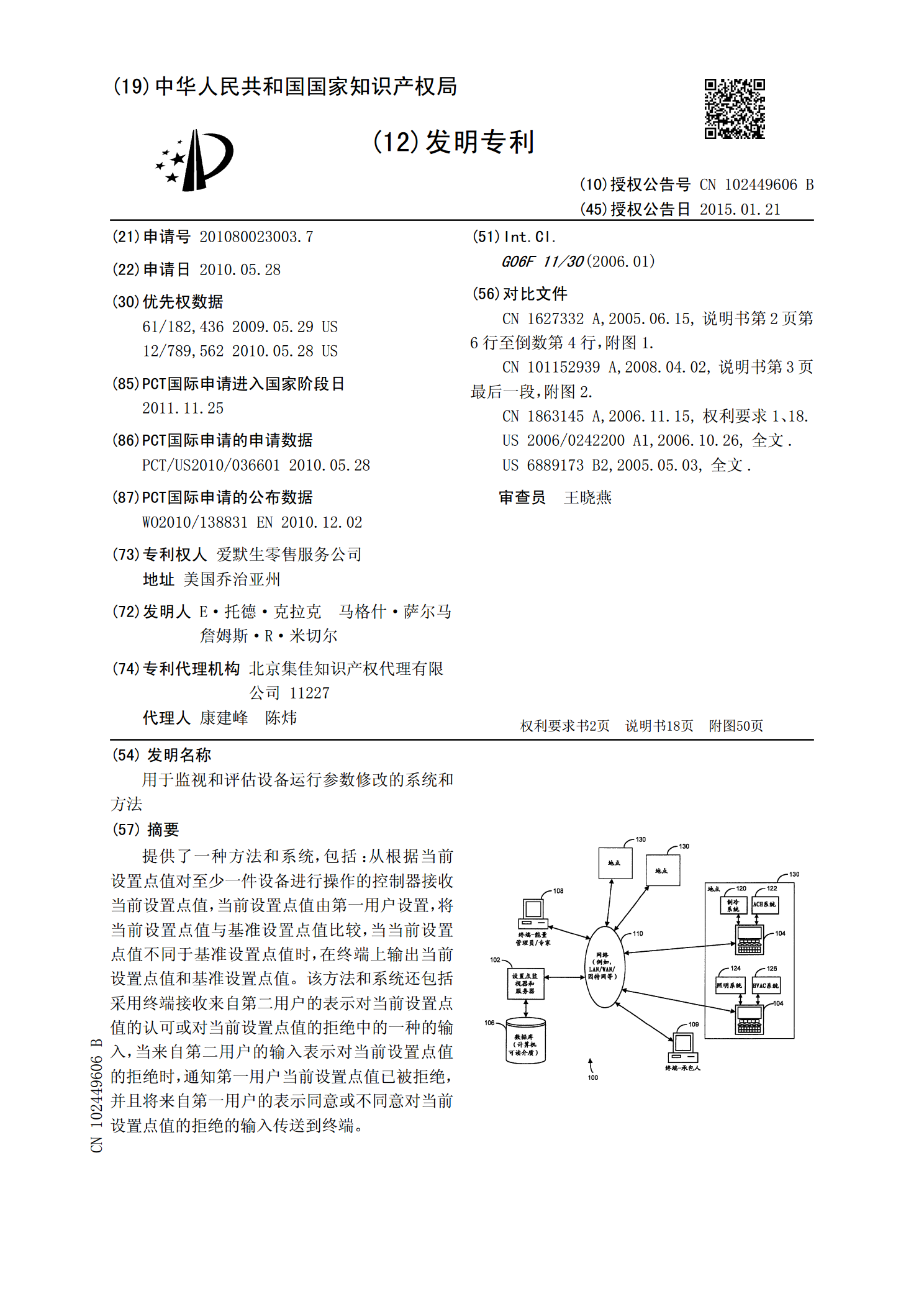
用于监视和评估设备运行参数修改的系统和方法.pdf
提供了一种方法和系统,包括:从根据当前设置点值对至少一件设备进行操作的控制器接收当前设置点值,当前设置点值由第一用户设置,将当前设置点值与基准设置点值比较,当当前设置点值不同于基准设置点值时,在终端上输出当前设置点值和基准设置点值。该方法和系统还包括采用终端接收来自第二用户的表示对当前设置点值的认可或对当前设置点值的拒绝中的一种的输入,当来自第二用户的输入表示对当前设置点值的拒绝时,通知第一用户当前设置点值已被拒绝,并且将来自第一用户的表示同意或不同意对当前设置点值的拒绝的输入传送到终端。
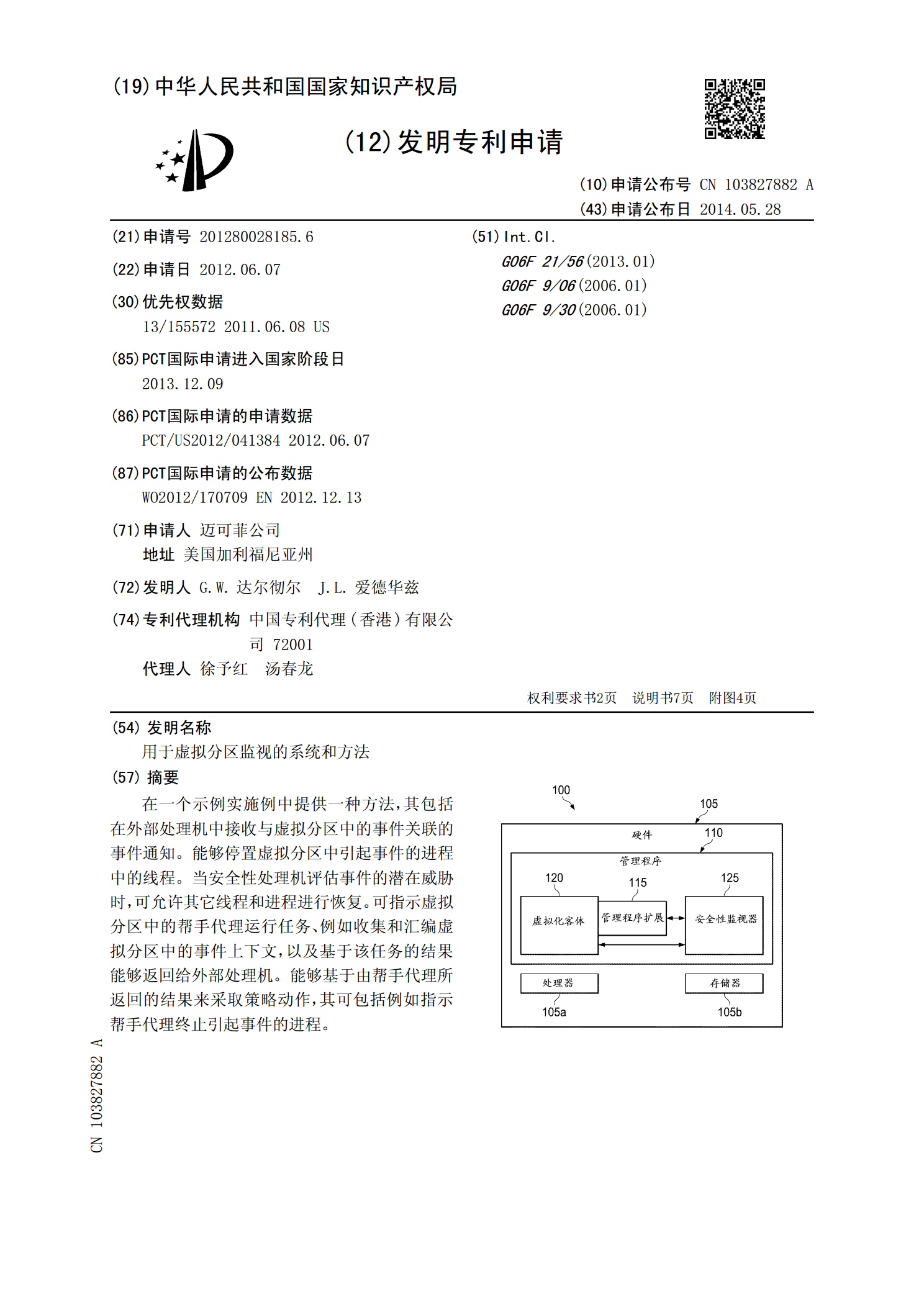
用于虚拟分区监视的系统和方法.pdf
在一个示例实施例中提供一种方法,其包括在外部处理机中接收与虚拟分区中的事件关联的事件通知。能够停置虚拟分区中引起事件的进程中的线程。当安全性处理机评估事件的潜在威胁时,可允许其它线程和进程进行恢复。可指示虚拟分区中的帮手代理运行任务、例如收集和汇编虚拟分区中的事件上下文,以及基于该任务的结果能够返回给外部处理机。能够基于由帮手代理所返回的结果来采取策略动作,其可包括例如指示帮手代理终止引起事件的进程。

用于监视流体分离和/或监视阀健康的系统和方法.pdf
本发明涉及用于监视流体分离和/或监视阀健康的系统和方法。具体而言,本主题大体涉及用于燃气涡轮的燃料系统和用于监视燃料系统中的流体分离的相关方法。更具体而言,系统和方法包括测量压差且比较测量与预定值。