
数据处理方法、装置、电子设备和存储介质.pdf

一只****呀盟


1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
数据处理方法、装置、存储介质和电子设备.pdf
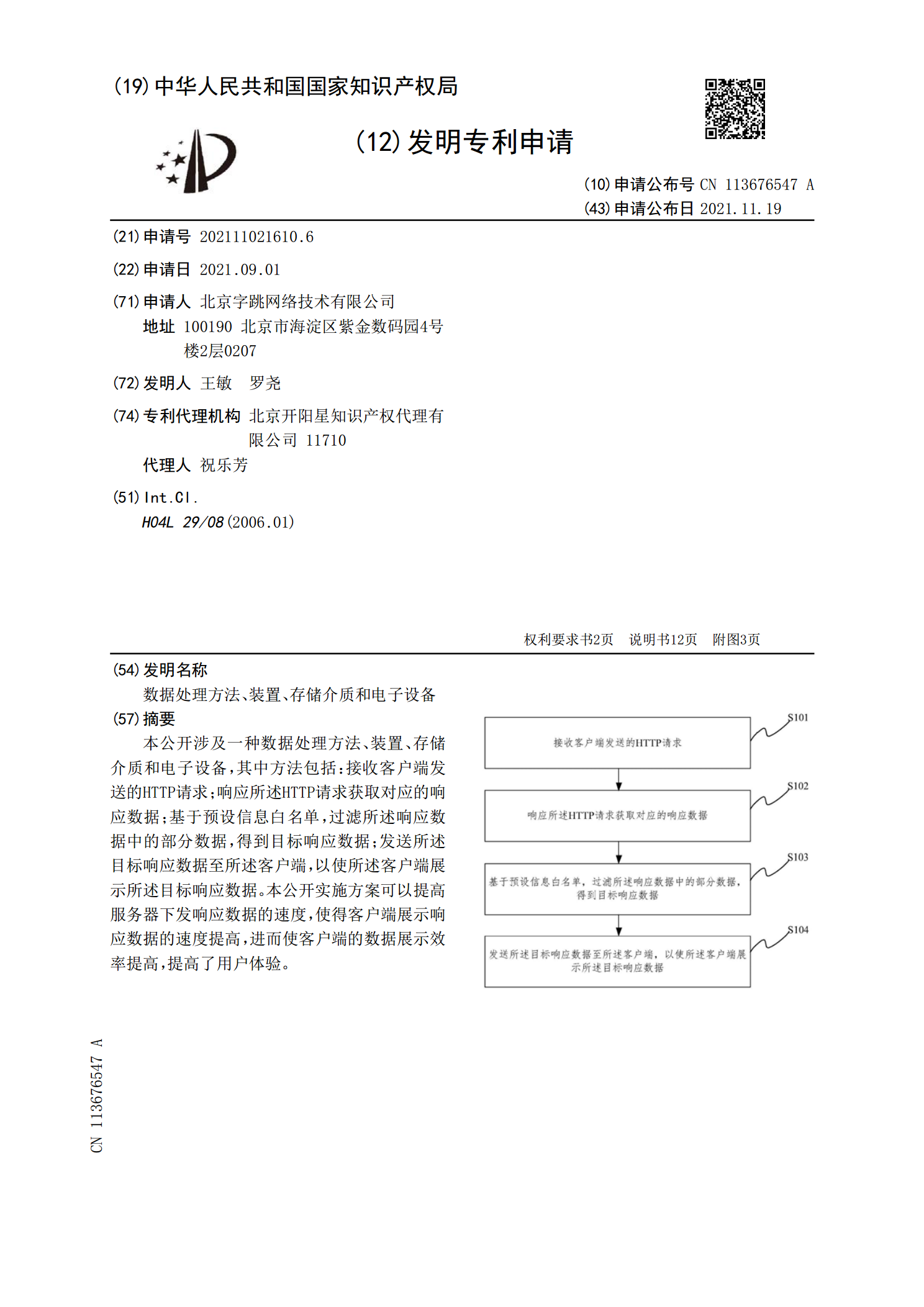
本公开涉及一种数据处理方法、装置、存储介质和电子设备,其中方法包括:接收客户端发送的HTTP请求;响应所述HTTP请求获取对应的响应数据;基于预设信息白名单,过滤所述响应数据中的部分数据,得到目标响应数据;发送所述目标响应数据至所述客户端,以使所述客户端展示所述目标响应数据。本公开实施方案可以提高服务器下发响应数据的速度,使得客户端展示响应数据的速度提高,进而使客户端的数据展示效率提高,提高了用户体验。
数据处理方法、装置、电子设备和存储介质.pdf
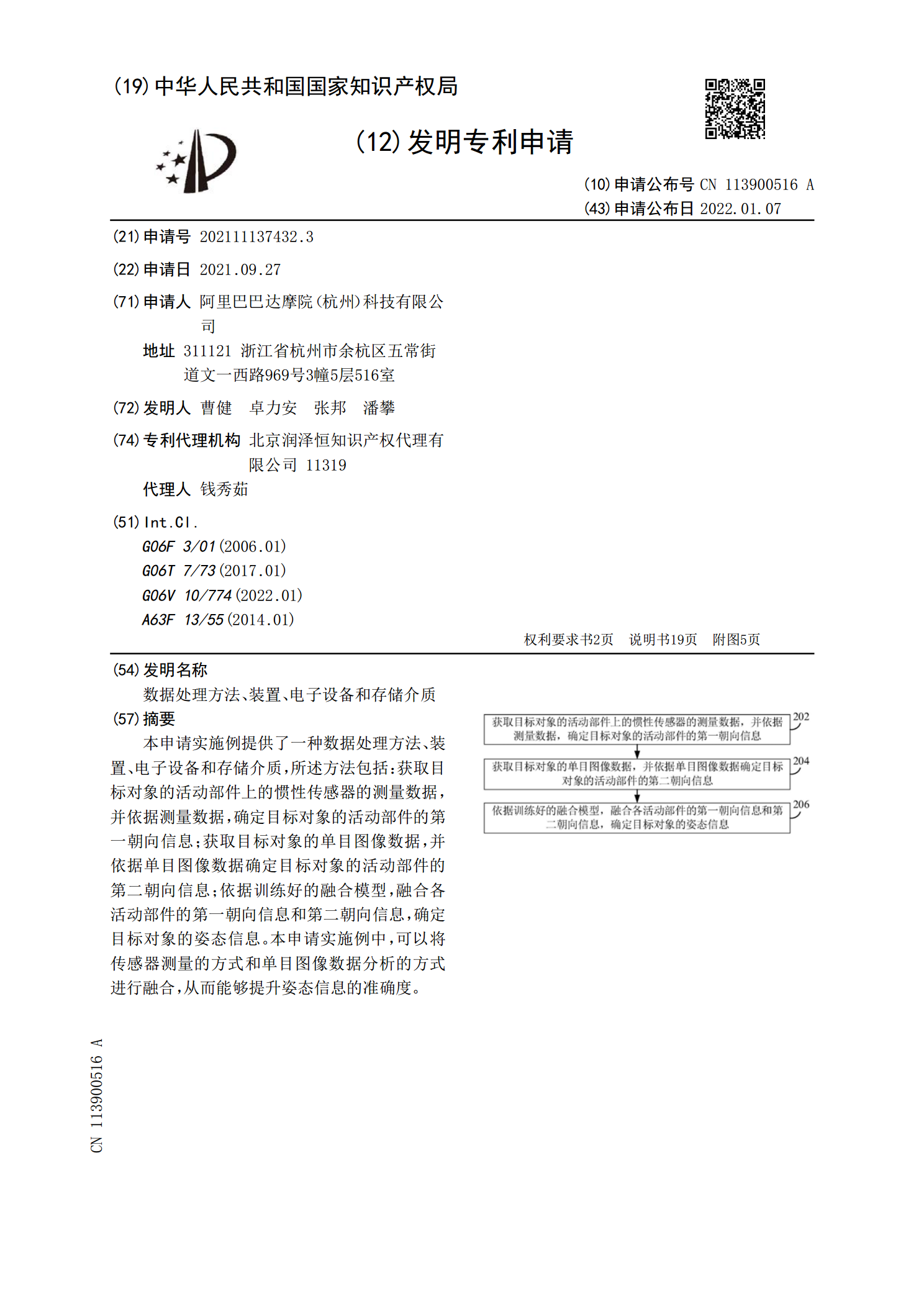
本申请实施例提供了一种数据处理方法、装置、电子设备和存储介质,所述方法包括:获取目标对象的活动部件上的惯性传感器的测量数据,并依据测量数据,确定目标对象的活动部件的第一朝向信息;获取目标对象的单目图像数据,并依据单目图像数据确定目标对象的活动部件的第二朝向信息;依据训练好的融合模型,融合各活动部件的第一朝向信息和第二朝向信息,确定目标对象的姿态信息。本申请实施例中,可以将传感器测量的方式和单目图像数据分析的方式进行融合,从而能够提升姿态信息的准确度。

数据处理方法、装置、电子设备和存储介质.pdf
本公开提供了一种数据处理方法、装置、电子设备和存储介质,可以应用于计算机技术领域和音视频处理技术领域。该方法包括:获取待处理会话数据,其中,待处理会话数据包括会话类型数据、音频数据和/或视频数据;对待处理会话数据进行预处理得到会话特征数据,其中,会话特征数据包括音频数据的时域特征、音频数据的频域特征和/或视频数据的图像运动特征;将会话特征数据输入质量提升模型的全连接层,输出目标时域特征、目标频域特征和/或目标图像运动特征;将目标时域特征、目标频域特征和/或目标图像运动特征输入质量提升模型的重建层,输出目标
数据处理方法、装置、电子设备和存储介质.pdf
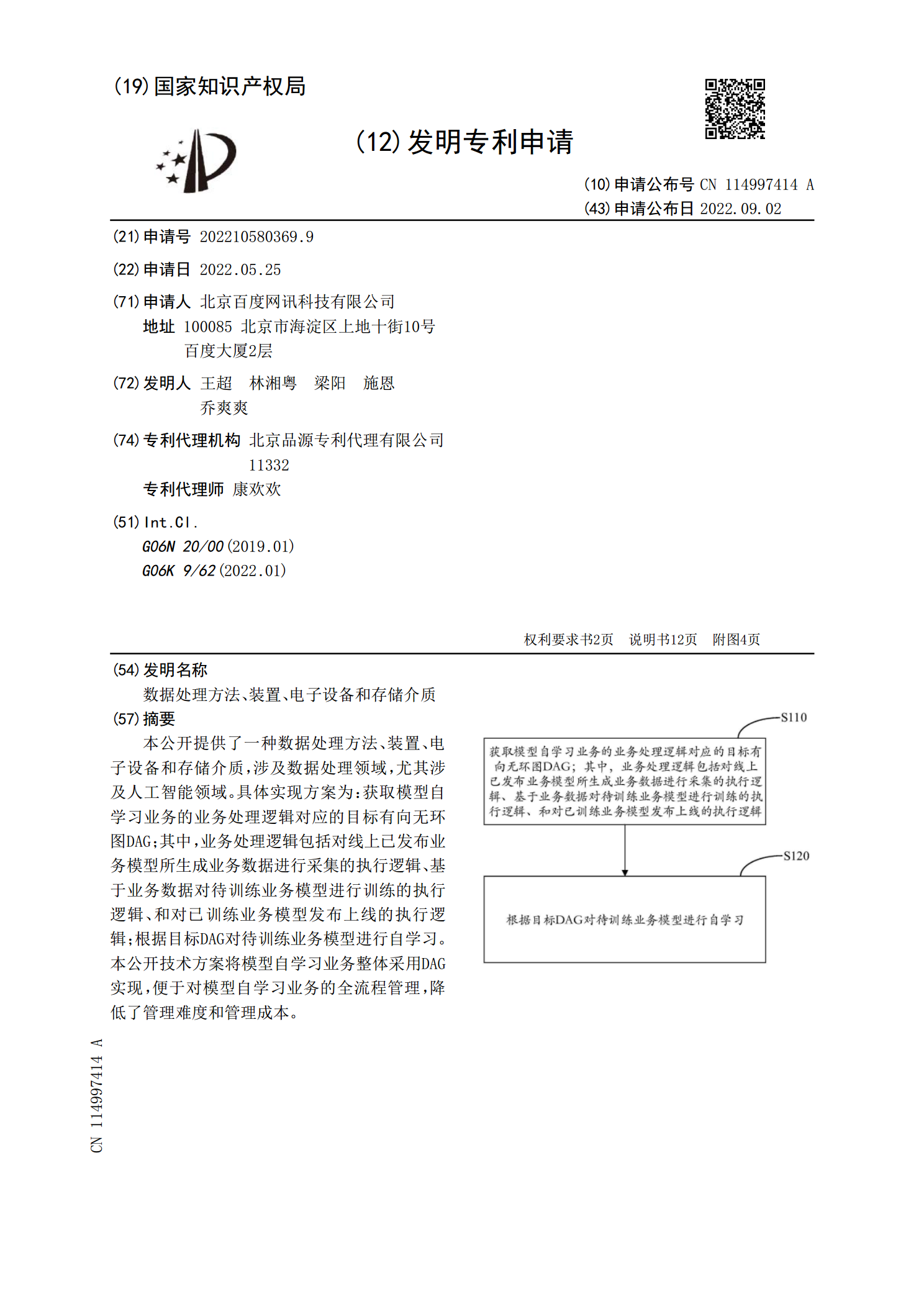
本公开提供了一种数据处理方法、装置、电子设备和存储介质,涉及数据处理领域,尤其涉及人工智能领域。具体实现方案为:获取模型自学习业务的业务处理逻辑对应的目标有向无环图DAG;其中,业务处理逻辑包括对线上已发布业务模型所生成业务数据进行采集的执行逻辑、基于业务数据对待训练业务模型进行训练的执行逻辑、和对已训练业务模型发布上线的执行逻辑;根据目标DAG对待训练业务模型进行自学习。本公开技术方案将模型自学习业务整体采用DAG实现,便于对模型自学习业务的全流程管理,降低了管理难度和管理成本。
数据处理方法及装置、电子设备和存储介质.pdf
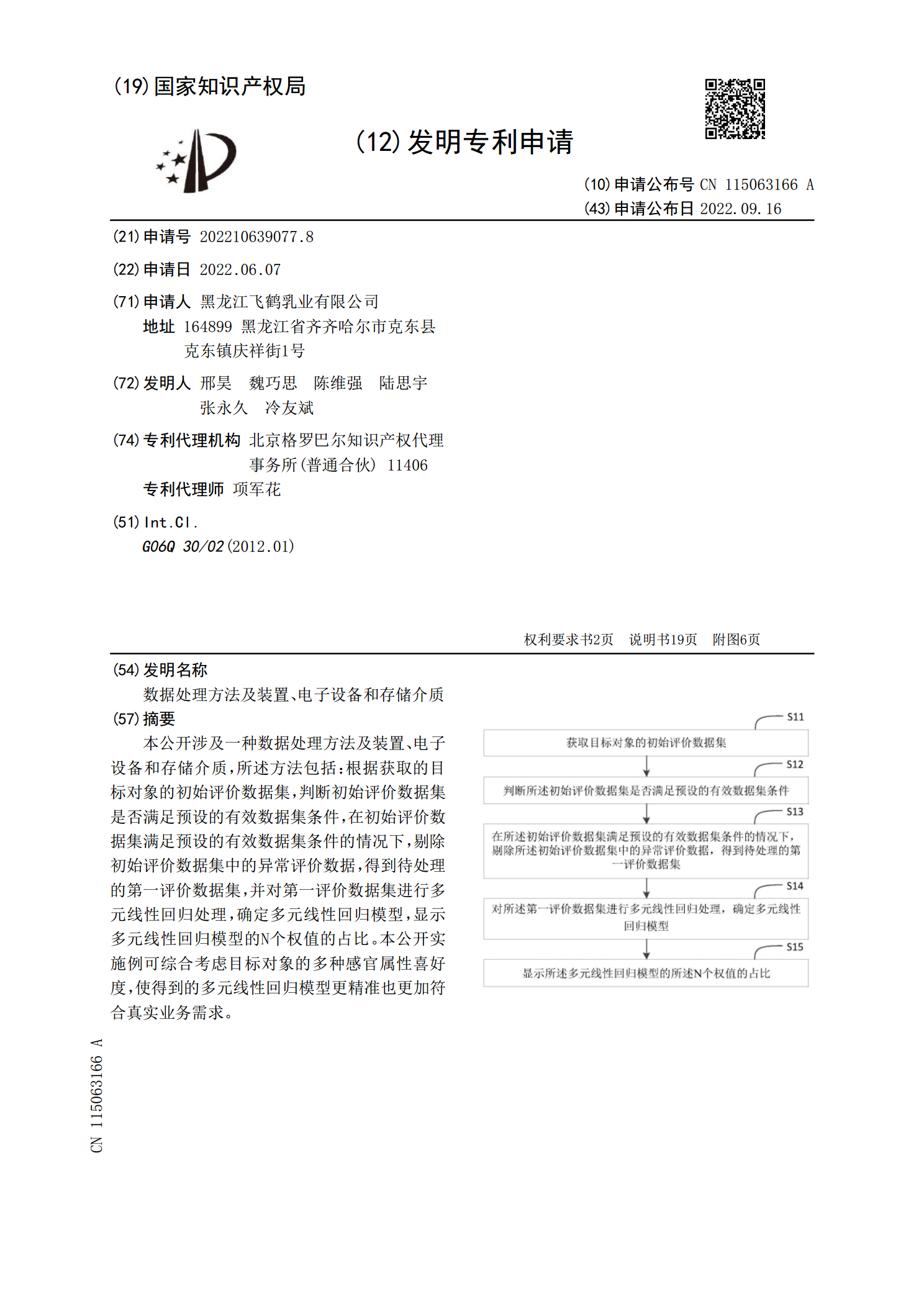
本公开涉及一种数据处理方法及装置、电子设备和存储介质,所述方法包括:根据获取的目标对象的初始评价数据集,判断初始评价数据集是否满足预设的有效数据集条件,在初始评价数据集满足预设的有效数据集条件的情况下,剔除初始评价数据集中的异常评价数据,得到待处理的第一评价数据集,并对第一评价数据集进行多元线性回归处理,确定多元线性回归模型,显示多元线性回归模型的N个权值的占比。本公开实施例可综合考虑目标对象的多种感官属性喜好度,使得到的多元线性回归模型更精准也更加符合真实业务需求。