
三维人脸模型重建方法、装置、电子设备及存储介质.pdf

Do****76

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共39页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
三维人脸模型重建方法、装置、电子设备及存储介质.pdf
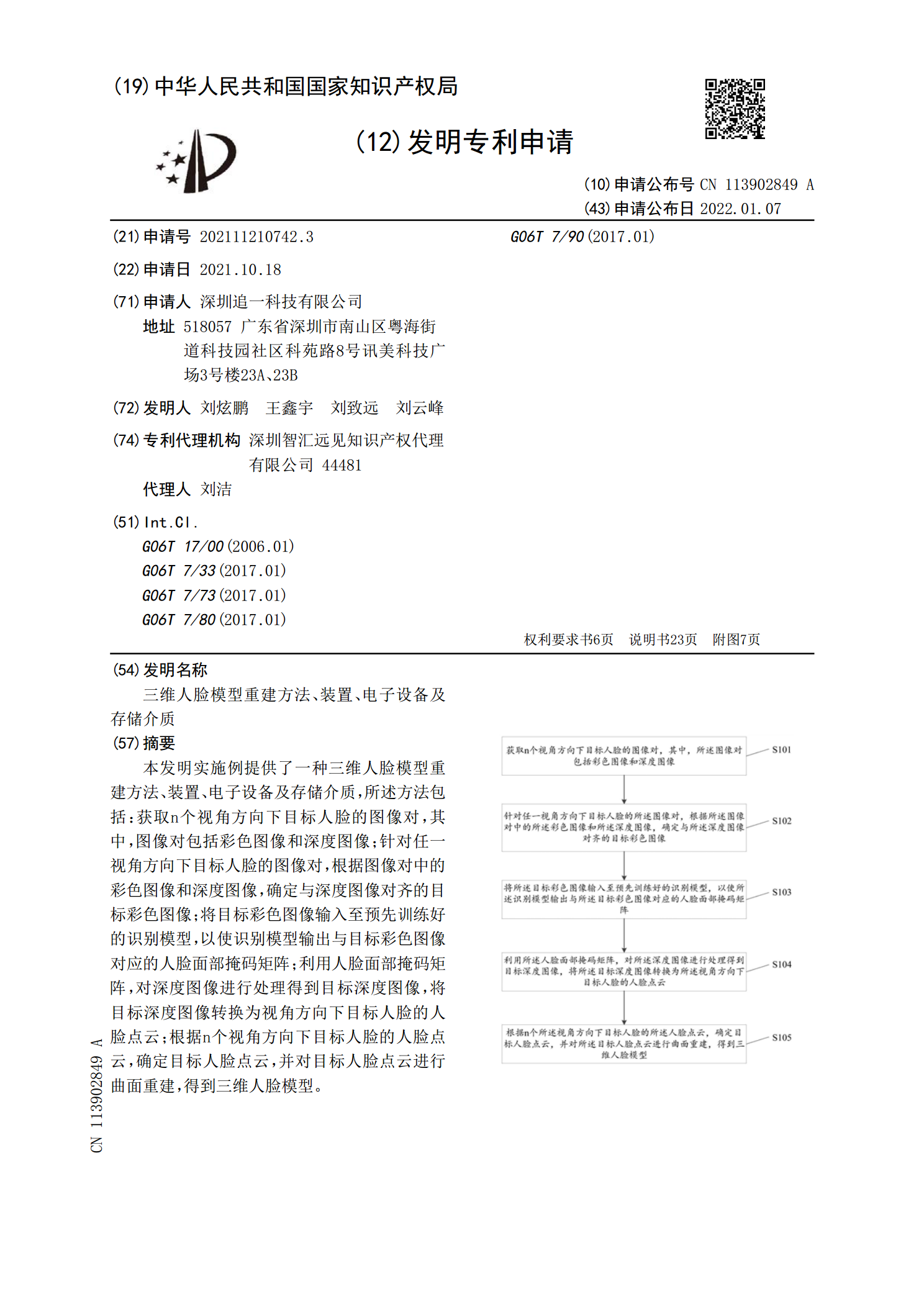
本发明实施例提供了一种三维人脸模型重建方法、装置、电子设备及存储介质,所述方法包括:获取n个视角方向下目标人脸的图像对,其中,图像对包括彩色图像和深度图像;针对任一视角方向下目标人脸的图像对,根据图像对中的彩色图像和深度图像,确定与深度图像对齐的目标彩色图像;将目标彩色图像输入至预先训练好的识别模型,以使识别模型输出与目标彩色图像对应的人脸面部掩码矩阵;利用人脸面部掩码矩阵,对深度图像进行处理得到目标深度图像,将目标深度图像转换为视角方向下目标人脸的人脸点云;根据n个视角方向下目标人脸的人脸点云,确定目标
三维人脸模型重建方法、装置、电子设备及存储介质.pdf
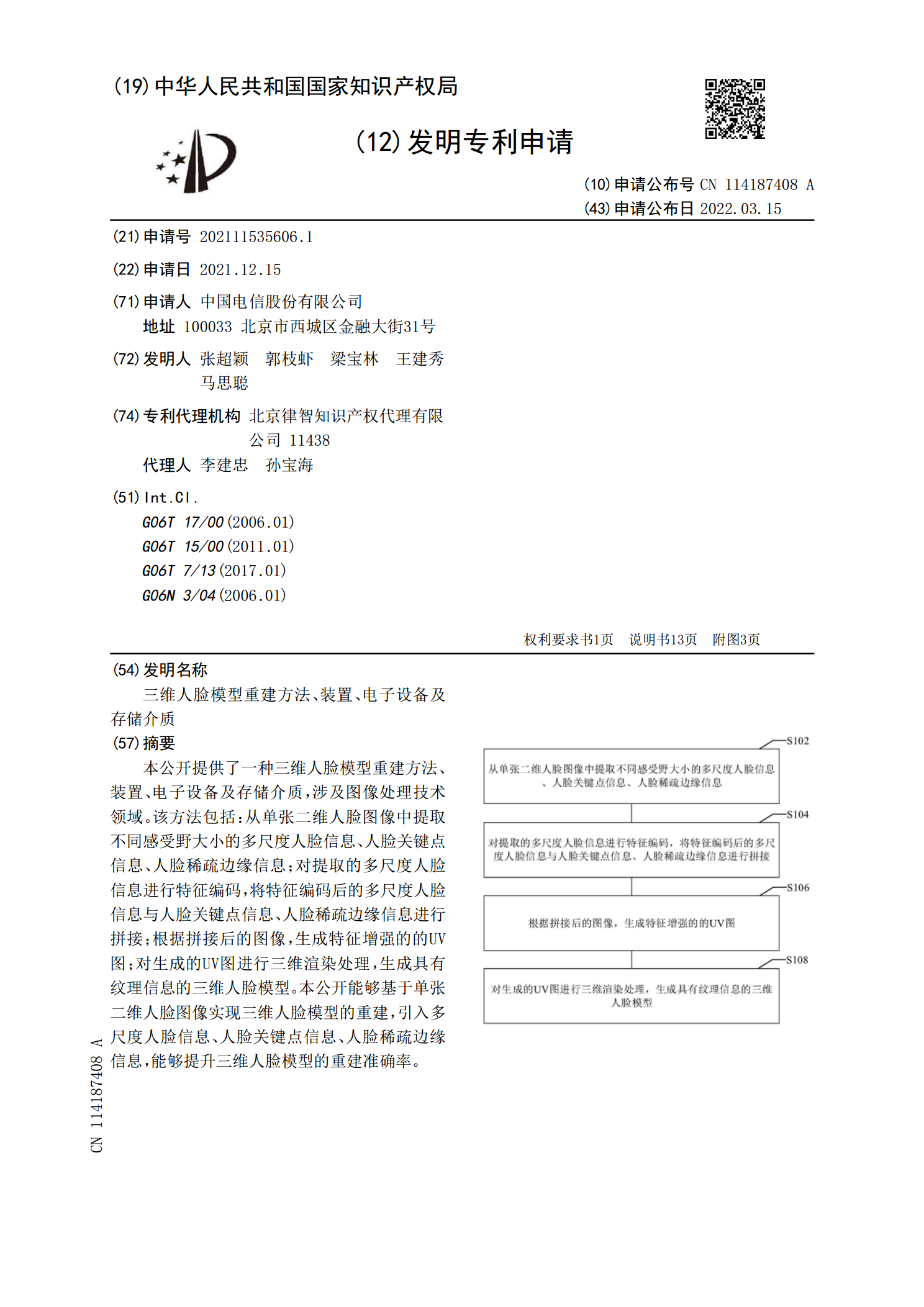
本公开提供了一种三维人脸模型重建方法、装置、电子设备及存储介质,涉及图像处理技术领域。该方法包括:从单张二维人脸图像中提取不同感受野大小的多尺度人脸信息、人脸关键点信息、人脸稀疏边缘信息;对提取的多尺度人脸信息进行特征编码,将特征编码后的多尺度人脸信息与人脸关键点信息、人脸稀疏边缘信息进行拼接;根据拼接后的图像,生成特征增强的的UV图;对生成的UV图进行三维渲染处理,生成具有纹理信息的三维人脸模型。本公开能够基于单张二维人脸图像实现三维人脸模型的重建,引入多尺度人脸信息、人脸关键点信息、人脸稀疏边缘信息,
三维人脸模型重建方法、装置、电子设备及存储介质.pdf
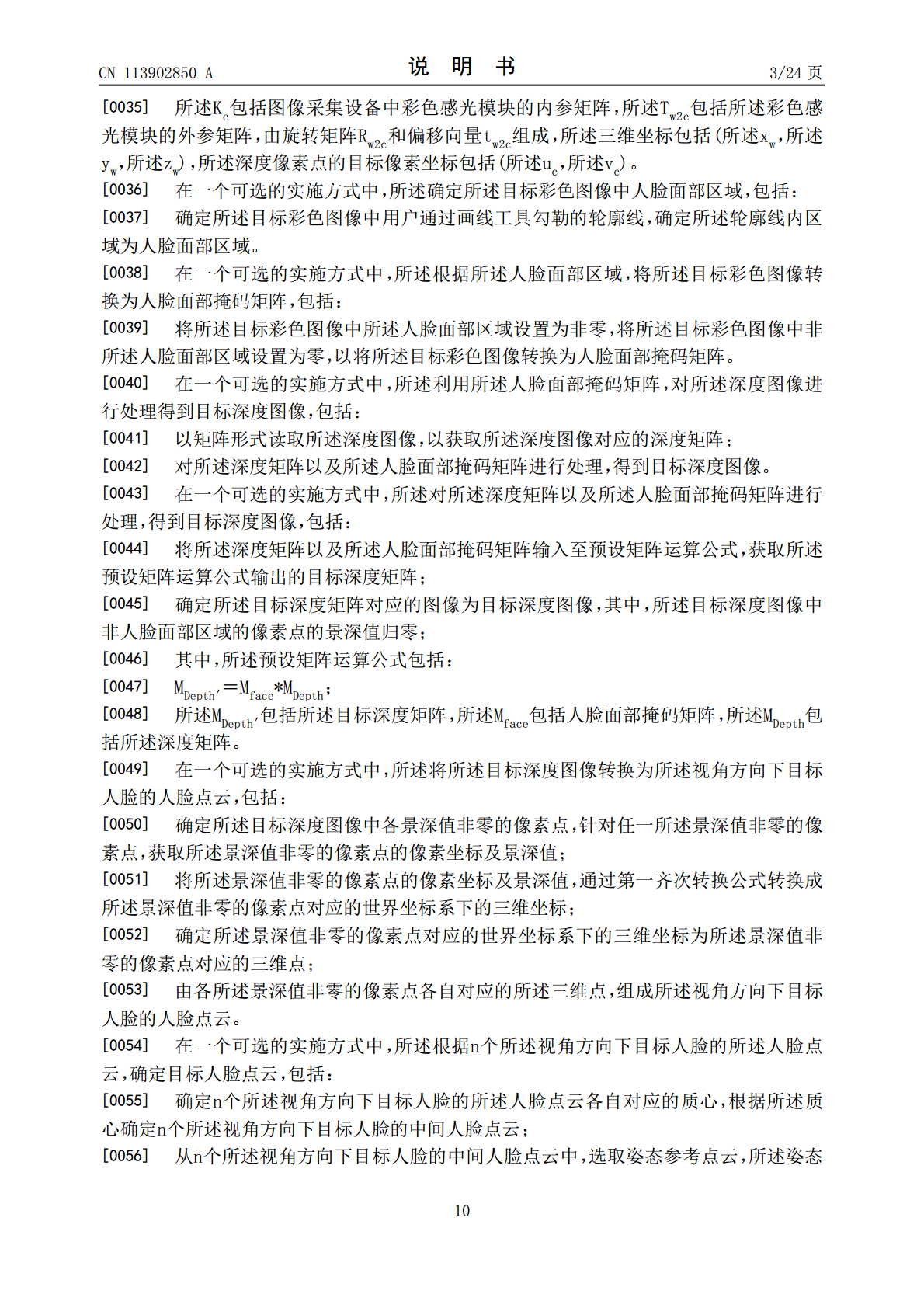
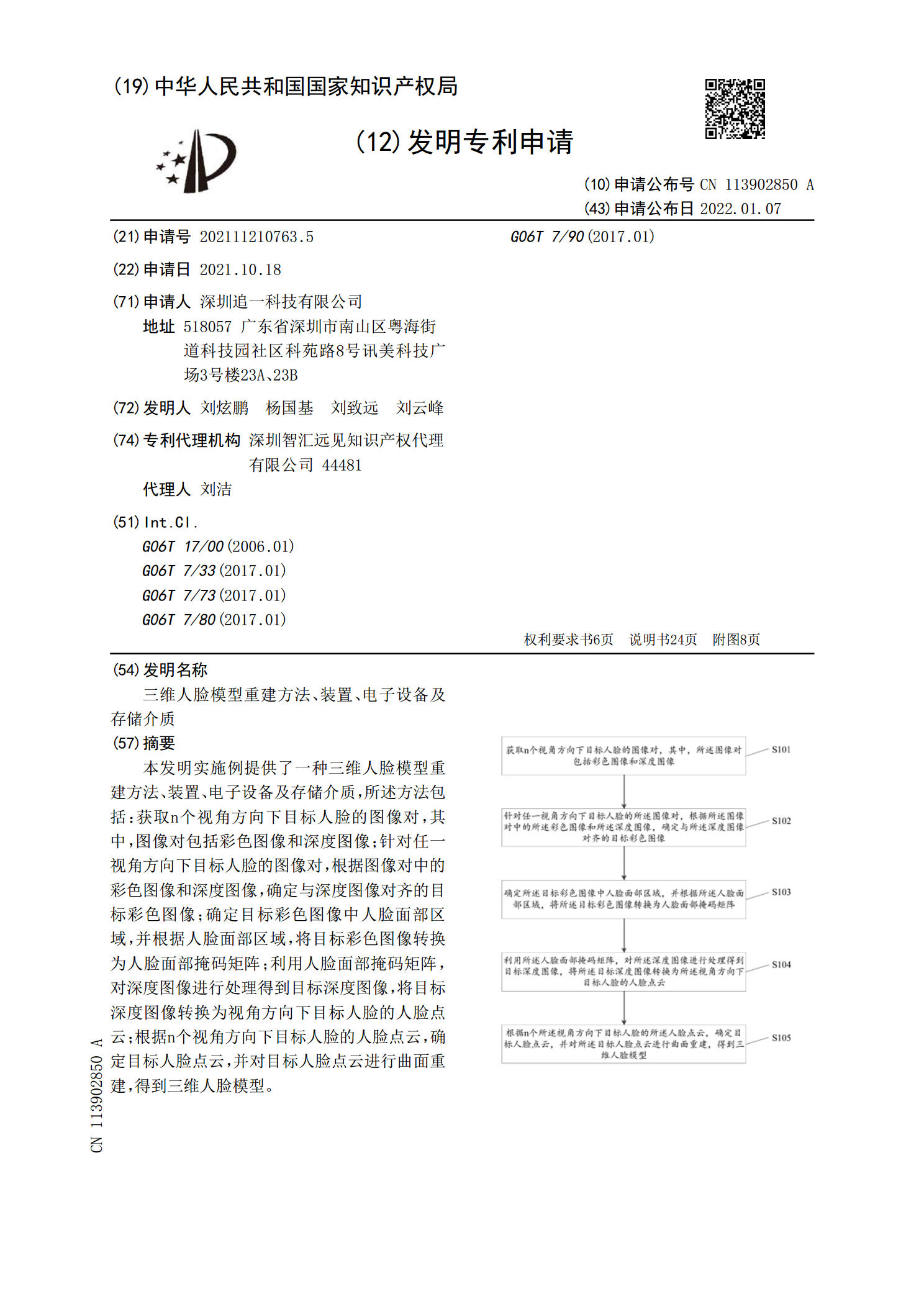
本发明实施例提供了一种三维人脸模型重建方法、装置、电子设备及存储介质,所述方法包括:获取n个视角方向下目标人脸的图像对,其中,图像对包括彩色图像和深度图像;针对任一视角方向下目标人脸的图像对,根据图像对中的彩色图像和深度图像,确定与深度图像对齐的目标彩色图像;确定目标彩色图像中人脸面部区域,并根据人脸面部区域,将目标彩色图像转换为人脸面部掩码矩阵;利用人脸面部掩码矩阵,对深度图像进行处理得到目标深度图像,将目标深度图像转换为视角方向下目标人脸的人脸点云;根据n个视角方向下目标人脸的人脸点云,确定目标人脸点
三维人脸模型重建方法、装置、电子设备及存储介质.pdf
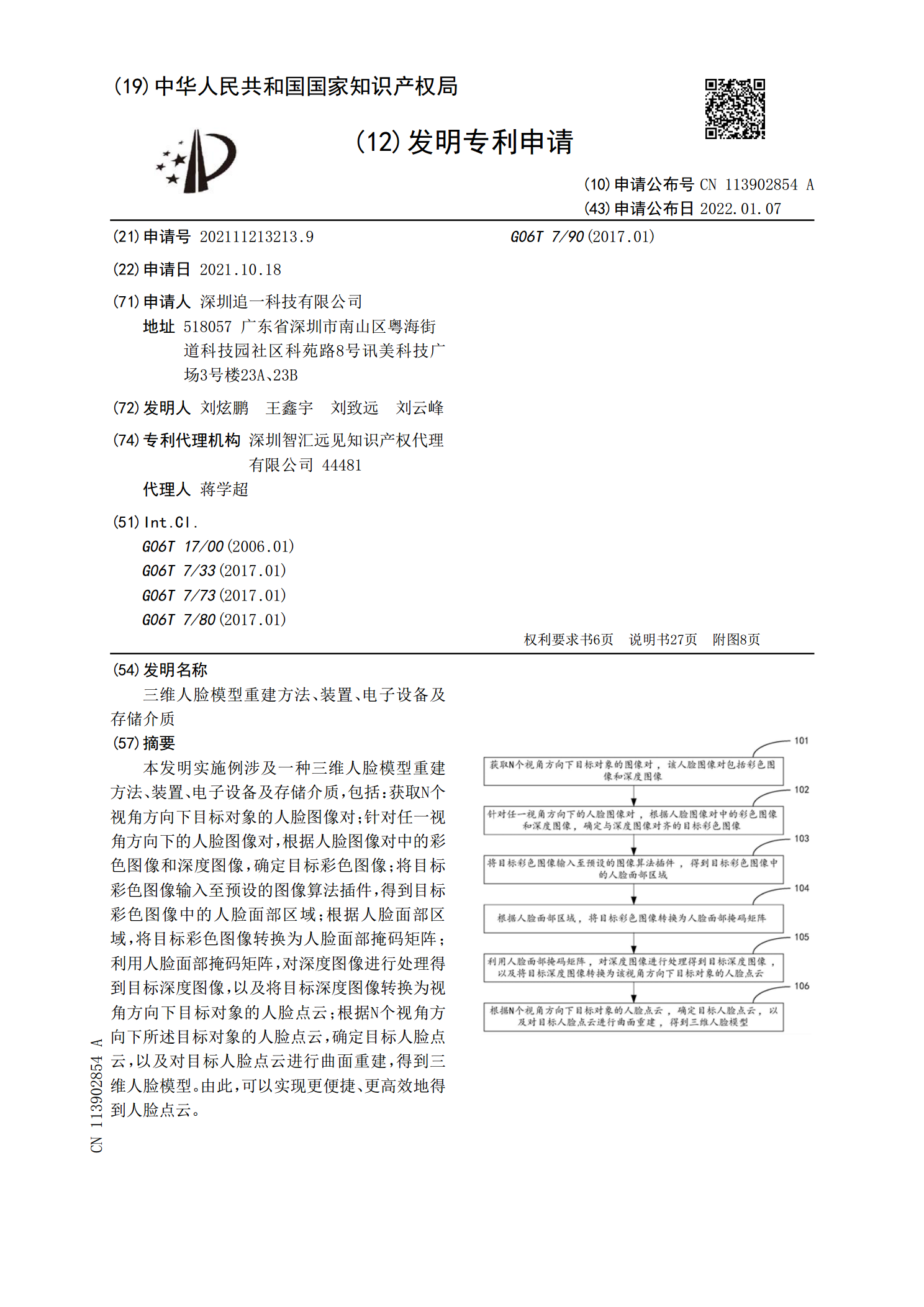
本发明实施例涉及一种三维人脸模型重建方法、装置、电子设备及存储介质,包括:获取N个视角方向下目标对象的人脸图像对;针对任一视角方向下的人脸图像对,根据人脸图像对中的彩色图像和深度图像,确定目标彩色图像;将目标彩色图像输入至预设的图像算法插件,得到目标彩色图像中的人脸面部区域;根据人脸面部区域,将目标彩色图像转换为人脸面部掩码矩阵;利用人脸面部掩码矩阵,对深度图像进行处理得到目标深度图像,以及将目标深度图像转换为视角方向下目标对象的人脸点云;根据N个视角方向下所述目标对象的人脸点云,确定目标人脸点云,以及对
三维人脸重建方法、装置、电子设备及存储介质.pdf
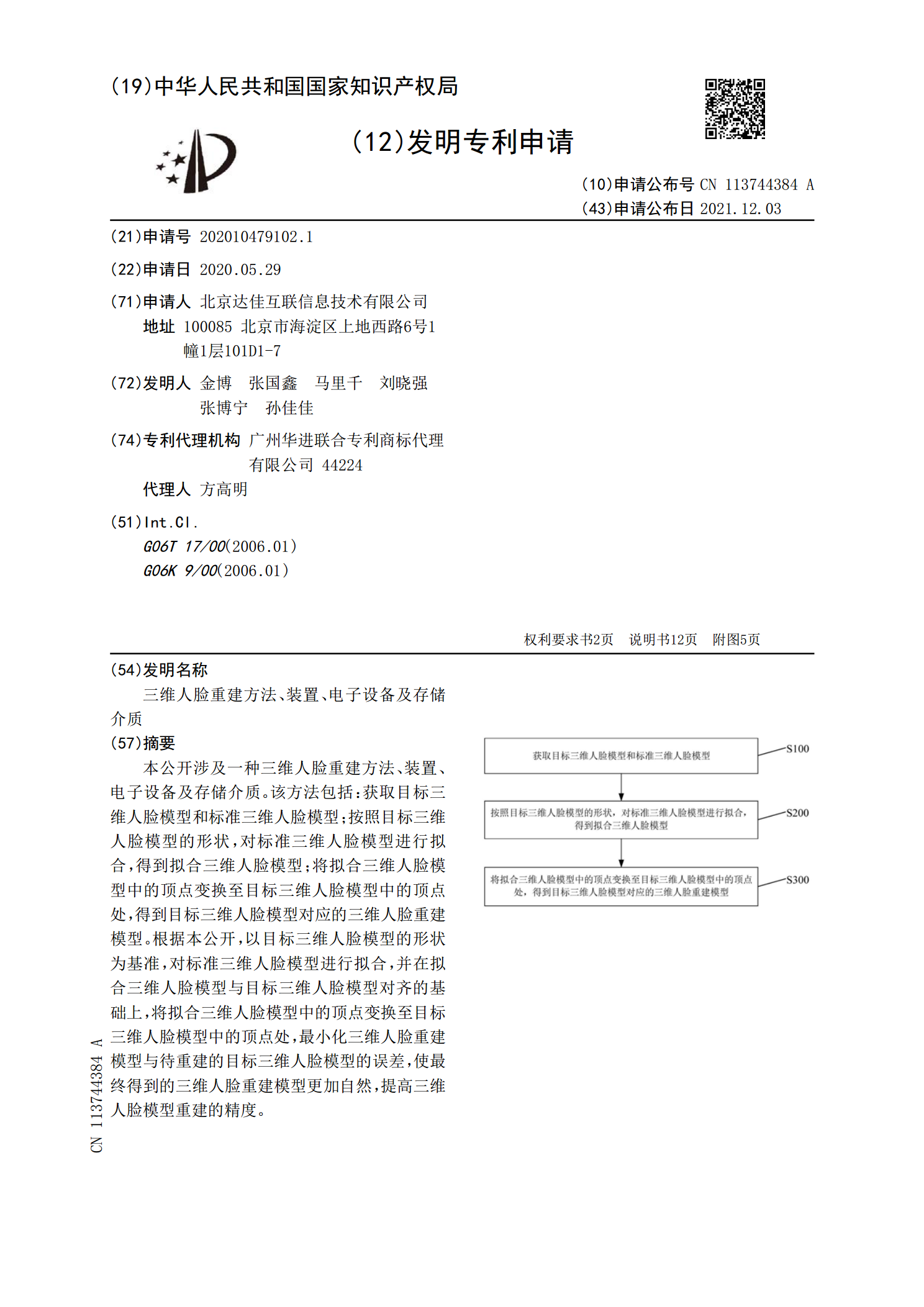
本公开涉及一种三维人脸重建方法、装置、电子设备及存储介质。该方法包括:获取目标三维人脸模型和标准三维人脸模型;按照目标三维人脸模型的形状,对标准三维人脸模型进行拟合,得到拟合三维人脸模型;将拟合三维人脸模型中的顶点变换至目标三维人脸模型中的顶点处,得到目标三维人脸模型对应的三维人脸重建模型。根据本公开,以目标三维人脸模型的形状为基准,对标准三维人脸模型进行拟合,并在拟合三维人脸模型与目标三维人脸模型对齐的基础上,将拟合三维人脸模型中的顶点变换至目标三维人脸模型中的顶点处,最小化三维人脸重建模型与待重建的目