
航天器编队展开重构最优控制求解方法和系统.pdf

文库****坚白


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
航天器编队展开重构最优控制求解方法和系统.pdf
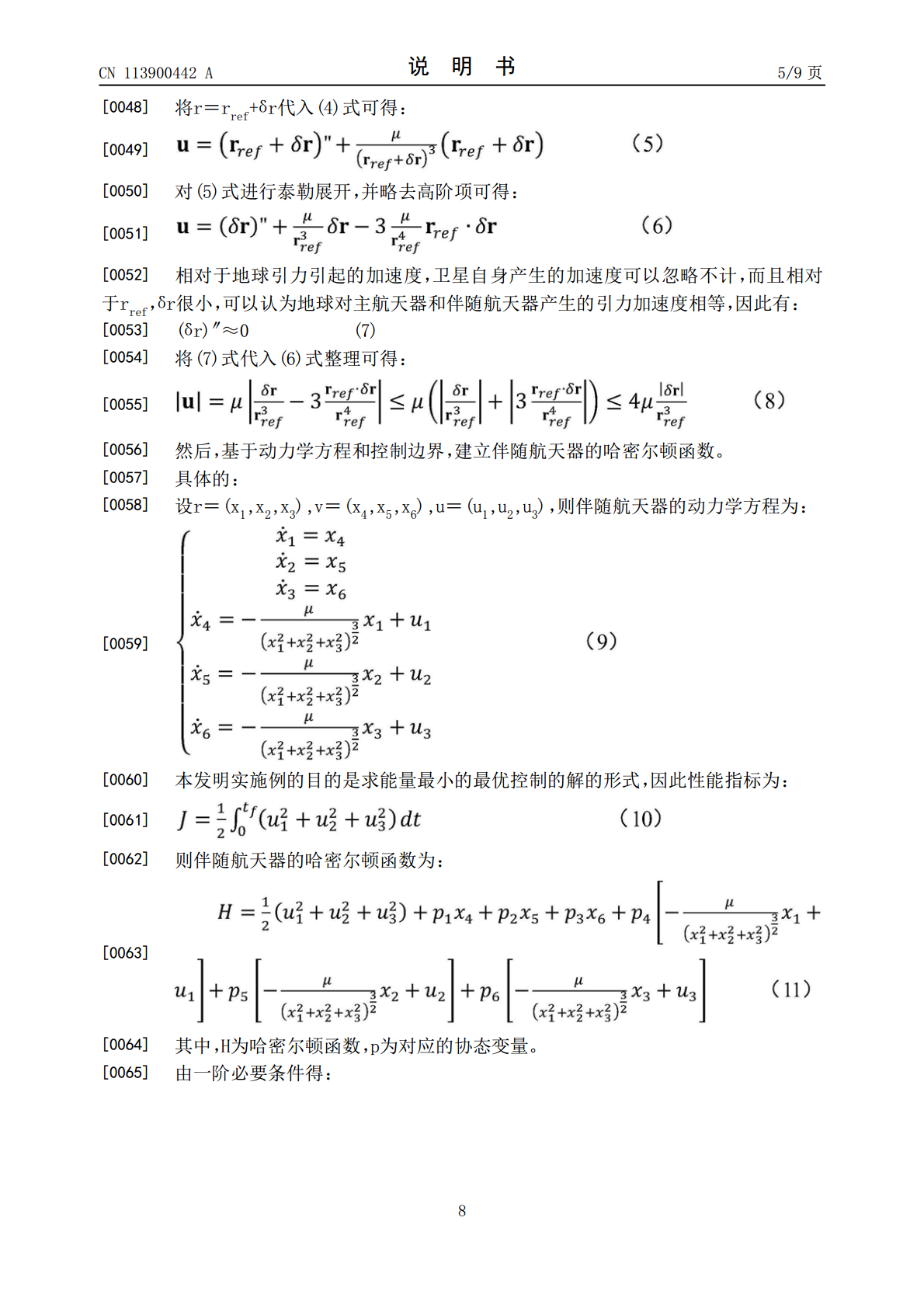
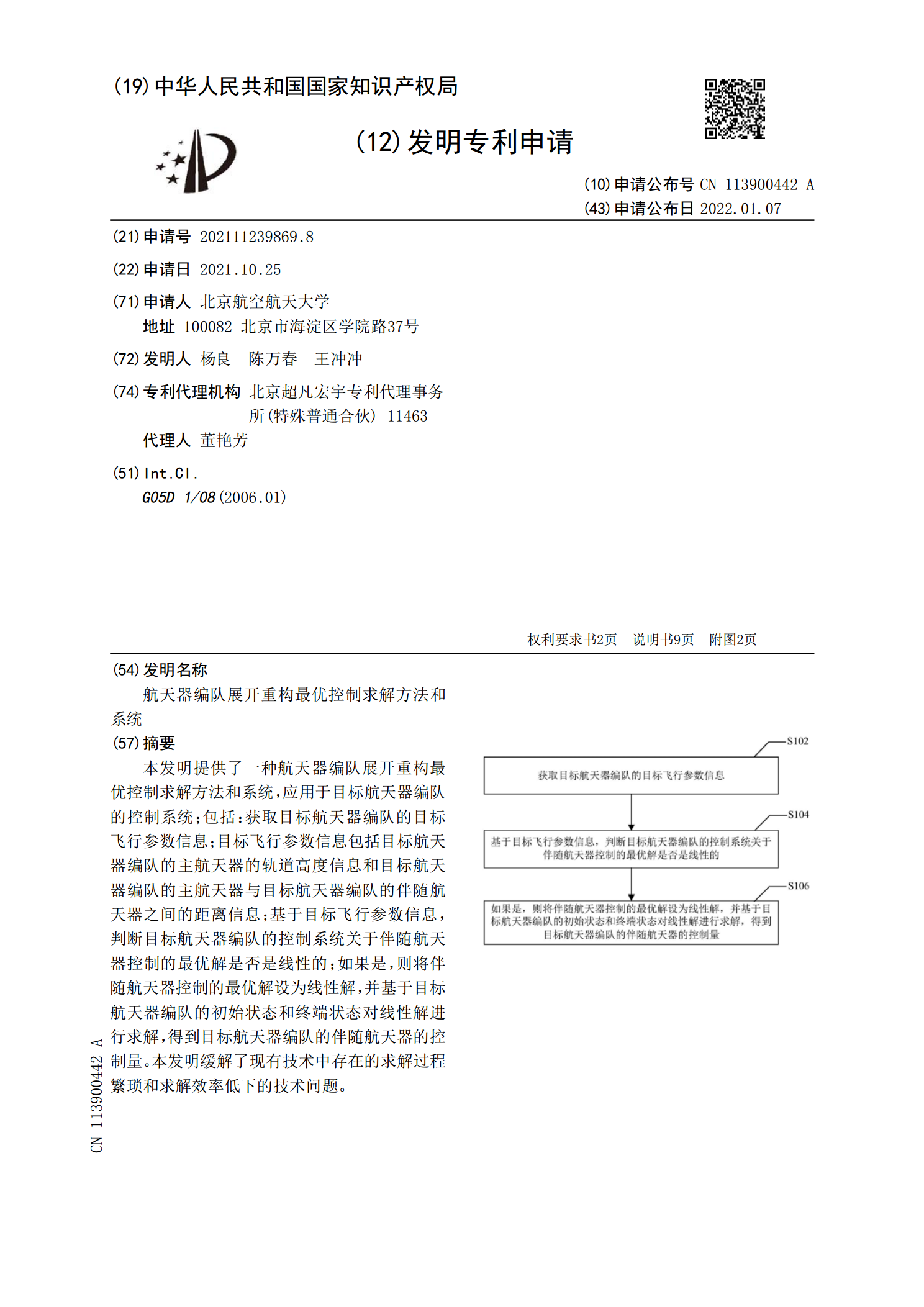
本发明提供了一种航天器编队展开重构最优控制求解方法和系统,应用于目标航天器编队的控制系统;包括:获取目标航天器编队的目标飞行参数信息;目标飞行参数信息包括目标航天器编队的主航天器的轨道高度信息和目标航天器编队的主航天器与目标航天器编队的伴随航天器之间的距离信息;基于目标飞行参数信息,判断目标航天器编队的控制系统关于伴随航天器控制的最优解是否是线性的;如果是,则将伴随航天器控制的最优解设为线性解,并基于目标航天器编队的初始状态和终端状态对线性解进行求解,得到目标航天器编队的伴随航天器的控制量。本发明缓解了现

一种微纳航天器编队的故障构型重构方法.docx
一种微纳航天器编队的故障构型重构方法Title:FaultConfigurationRefinementMethodforMicroandNanoSatelliteSwarmFormationAbstract:MicroandnanosatelliteshavegainedsignificantattentioninrecentyearsduetotheirpotentialapplicationsinvariousfieldsrangingfromcommunicationandEarthobserva

基于相对视线矢量测量的多航天器编队相对姿态求解方法.docx
基于相对视线矢量测量的多航天器编队相对姿态求解方法摘要:多航天器编队具有较高的任务灵活性和任务协同能力,但是编队中各个航天器之间的相对姿态控制是需要解决的关键问题之一。基于相对视线矢量测量的多航天器编队相对姿态求解方法是一种可行的方法。本文介绍了该方法的原理、流程和实验结果,并对该方法进行评价和展望。关键字:多航天器编队,相对姿态,相对视线矢量测量一、引言多航天器编队技术是指由多个航天器组成的、具有协同控制能力的空间飞行器系统。多航天器编队技术可以实现多项任务,如宇宙物理、回收舱能源、地球观测等。然而,多
基于线性伪谱模型预测控制的航天器编队制导方法和系统.pdf
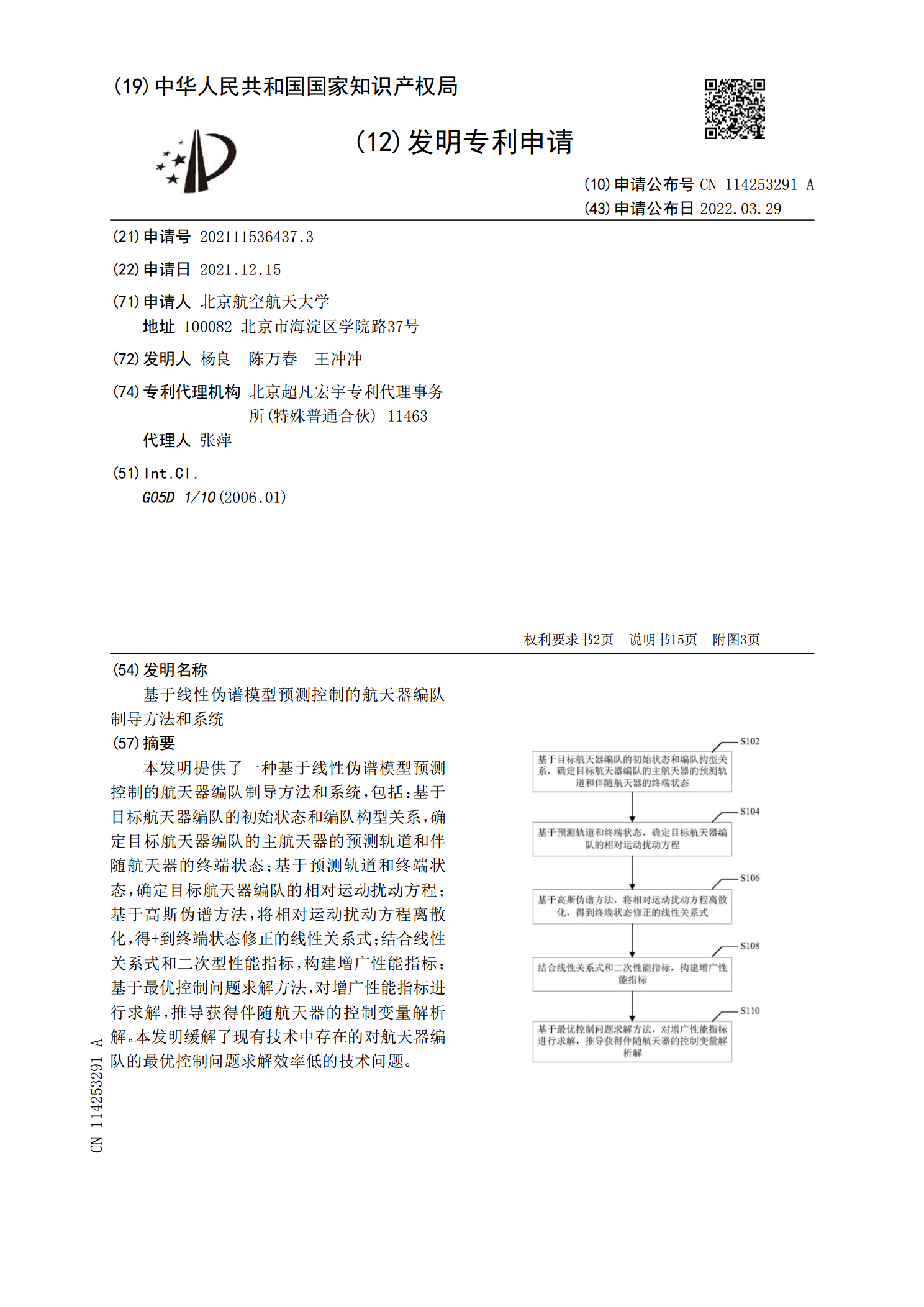
本发明提供了一种基于线性伪谱模型预测控制的航天器编队制导方法和系统,包括:基于目标航天器编队的初始状态和编队构型关系,确定目标航天器编队的主航天器的预测轨道和伴随航天器的终端状态;基于预测轨道和终端状态,确定目标航天器编队的相对运动扰动方程;基于高斯伪谱方法,将相对运动扰动方程离散化,得+到终端状态修正的线性关系式;结合线性关系式和二次型性能指标,构建增广性能指标;基于最优控制问题求解方法,对增广性能指标进行求解,推导获得伴随航天器的控制变量解析解。本发明缓解了现有技术中存在的对航天器编队的最优控制问题求

航天器燃料最优编队机动控制的解析方法.docx
航天器燃料最优编队机动控制的解析方法航天器编队机动控制是探索和监测外星球存在的基础设施和天体时密切关注的领域之一。在进行编队机动控制时,一个关键问题就是如何规划和实现编队阵列的运动。不同航天器在宇宙中的运动轨迹和使用的燃料不同,这可能导致在执行机动时,燃料使用的差异可能会导致编队机动控制的相对效率不同。为了解决这个问题,我们需要使用最优燃料分配技术来优化机动控制。最优编队机动控制问题可以看作是一个典型的极值问题,其中我们需要最小化燃料消耗,同时保证编队阵列的运动轨迹和航天器之间的质量关系。为了达到这个目标