
一种基于无人机成像的光伏热斑组件检测后定位方法.pdf

是你****韵呀

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于无人机成像的光伏热斑组件检测后定位方法.pdf
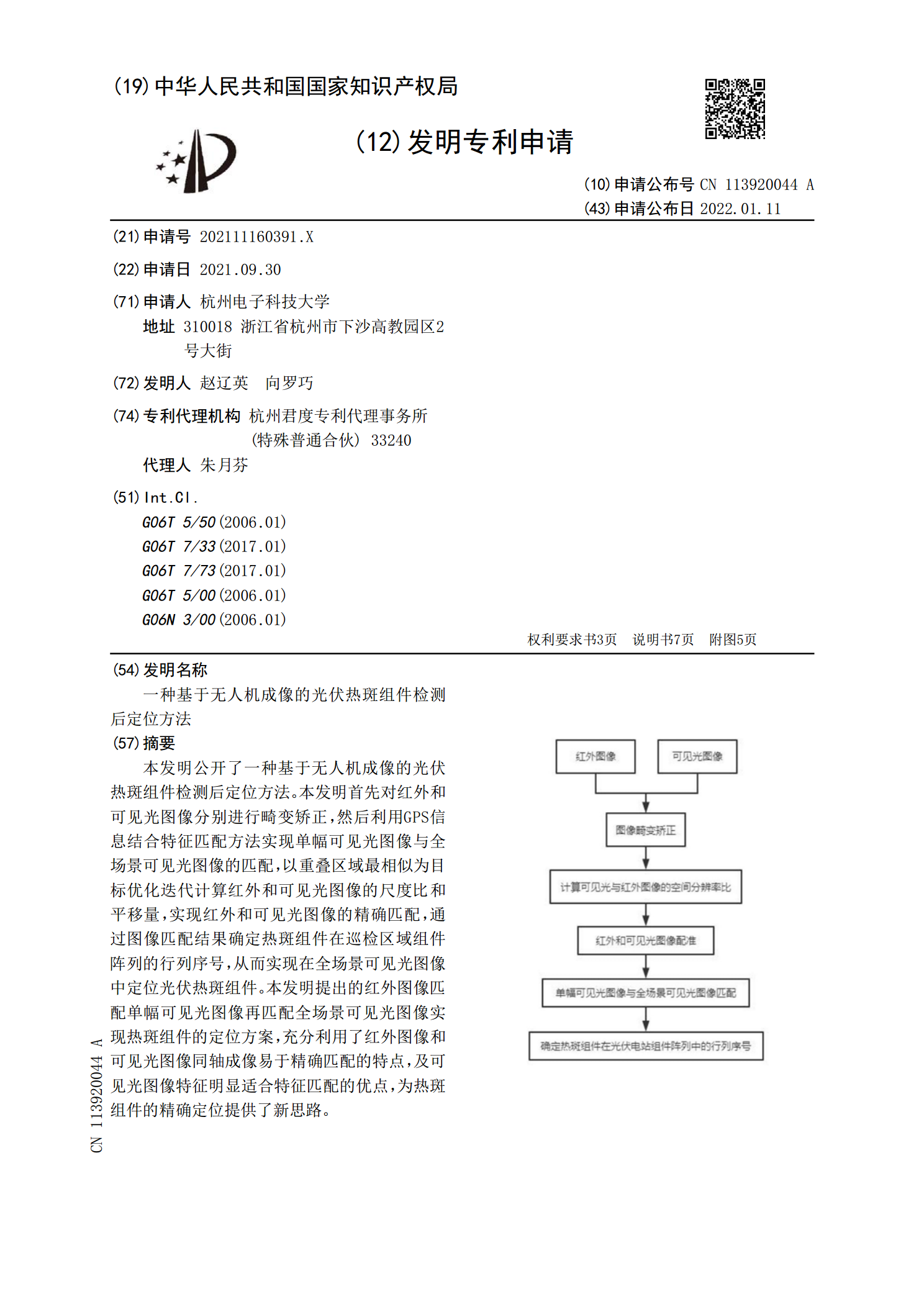
本发明公开了一种基于无人机成像的光伏热斑组件检测后定位方法。本发明首先对红外和可见光图像分别进行畸变矫正,然后利用GPS信息结合特征匹配方法实现单幅可见光图像与全场景可见光图像的匹配,以重叠区域最相似为目标优化迭代计算红外和可见光图像的尺度比和平移量,实现红外和可见光图像的精确匹配,通过图像匹配结果确定热斑组件在巡检区域组件阵列的行列序号,从而实现在全场景可见光图像中定位光伏热斑组件。本发明提出的红外图像匹配单幅可见光图像再匹配全场景可见光图像实现热斑组件的定位方案,充分利用了红外图像和可见光图像同轴成像
基于红外视频的光伏组件热斑检测定位方法.pdf
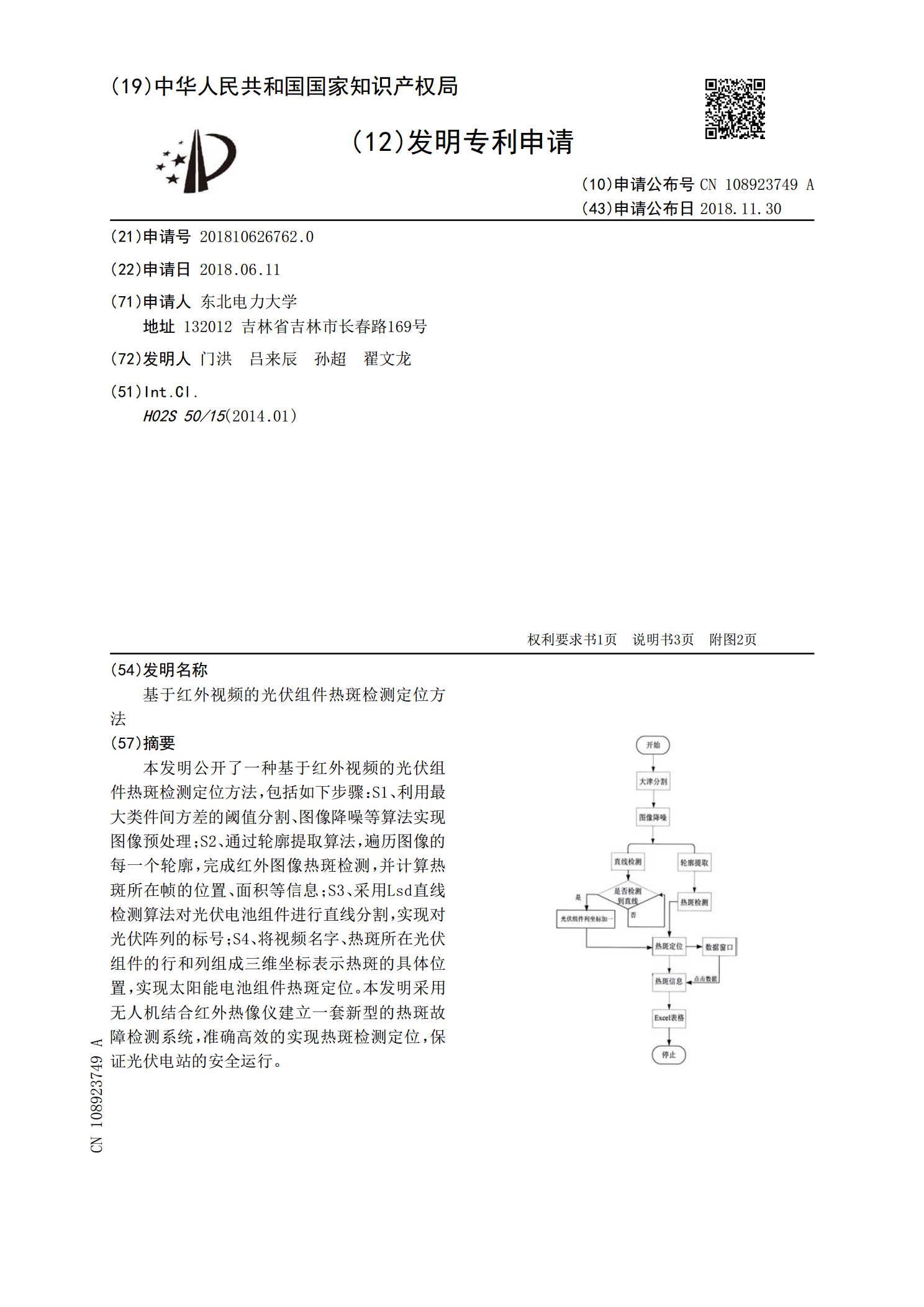
本发明公开了一种基于红外视频的光伏组件热斑检测定位方法,包括如下步骤:S1、利用最大类件间方差的阈值分割、图像降噪等算法实现图像预处理;S2、通过轮廓提取算法,遍历图像的每一个轮廓,完成红外图像热斑检测,并计算热斑所在帧的位置、面积等信息;S3、采用Lsd直线检测算法对光伏电池组件进行直线分割,实现对光伏阵列的标号;S4、将视频名字、热斑所在光伏组件的行和列组成三维坐标表示热斑的具体位置,实现太阳能电池组件热斑定位。本发明采用无人机结合红外热像仪建立一套新型的热斑故障检测系统,准确高效的实现热斑检测定位,
一种基于完全邻域保持嵌入的光伏组件热斑故障诊断方法.pdf
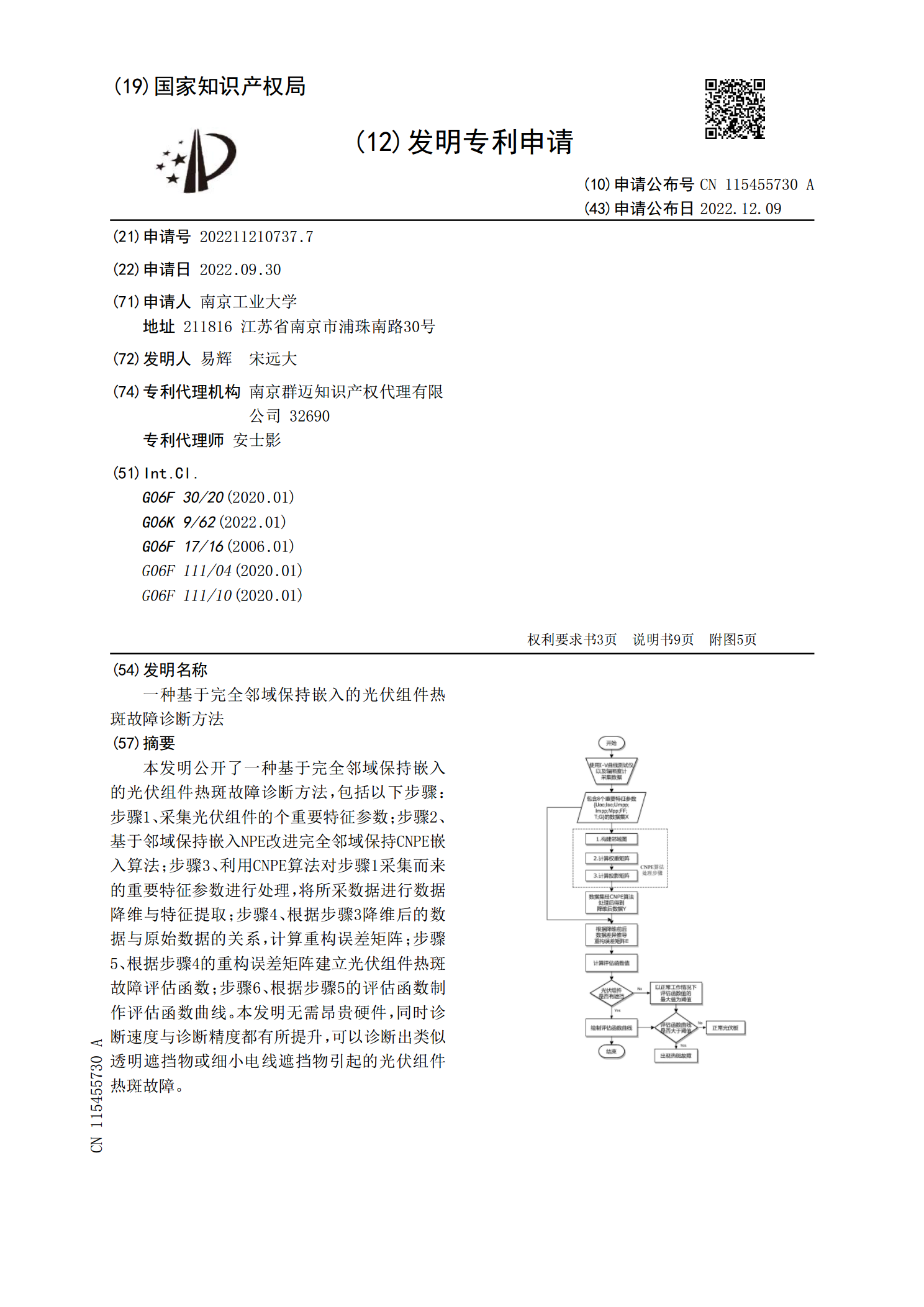
本发明公开了一种基于完全邻域保持嵌入的光伏组件热斑故障诊断方法,包括以下步骤:步骤1、采集光伏组件的个重要特征参数;步骤2、基于邻域保持嵌入NPE改进完全邻域保持CNPE嵌入算法;步骤3、利用CNPE算法对步骤1采集而来的重要特征参数进行处理,将所采数据进行数据降维与特征提取;步骤4、根据步骤3降维后的数据与原始数据的关系,计算重构误差矩阵;步骤5、根据步骤4的重构误差矩阵建立光伏组件热斑故障评估函数;步骤6、根据步骤5的评估函数制作评估函数曲线。本发明无需昂贵硬件,同时诊断速度与诊断精度都有所提升,可以

光伏组件热斑效应ppt课件.ppt
七、太阳能电池组件的“热斑效应”在一定的条件下,一串联支路中被遮藏的太阳能电池组件将被当作负载消耗其他被光照的太阳能电池组件所产生的能量,被遮挡的太阳能电池组件此时将会发热,这就是“热斑效应”。这种效应会严重地破坏太阳能电组件。有光照的电池组件所产生的部分能量或所有能量,都可能被遮蔽的组件所消耗。假定太阳能电池组件的串联回路中某一块被部分遮挡,调节负载电阻R,可使太阳能电池组件的工作状态由开路到短路。45从d、c、b、a四种工作状态进行分析:(1)调整太阳能电池组的输出阻抗,使其工作在开路(d点),此时工
光伏组件热斑试验电池挑选设备.pdf
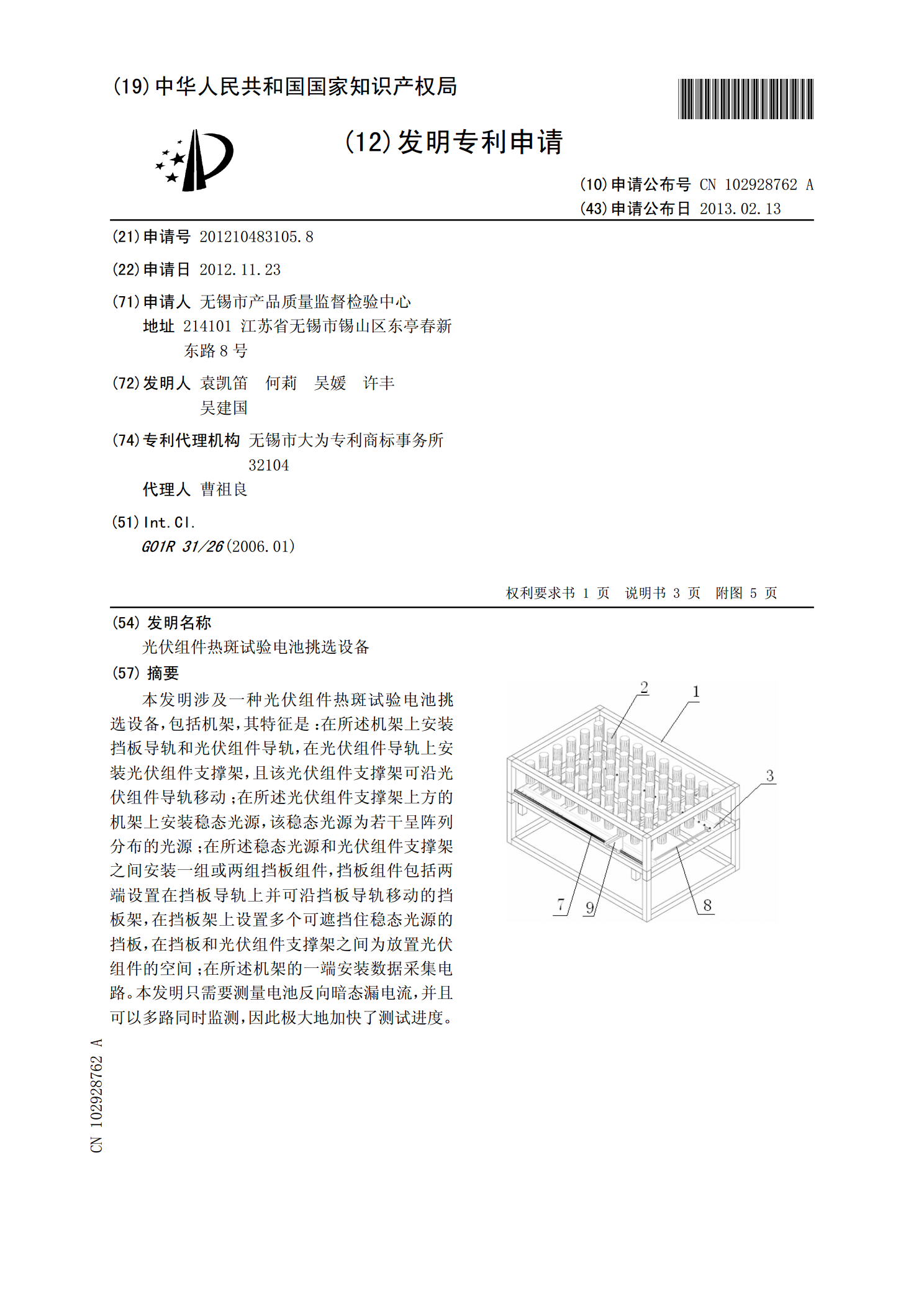
本发明涉及一种光伏组件热斑试验电池挑选设备,包括机架,其特征是:在所述机架上安装挡板导轨和光伏组件导轨,在光伏组件导轨上安装光伏组件支撑架,且该光伏组件支撑架可沿光伏组件导轨移动;在所述光伏组件支撑架上方的机架上安装稳态光源,该稳态光源为若干呈阵列分布的光源;在所述稳态光源和光伏组件支撑架之间安装一组或两组挡板组件,挡板组件包括两端设置在挡板导轨上并可沿挡板导轨移动的挡板架,在挡板架上设置多个可遮挡住稳态光源的挡板,在挡板和光伏组件支撑架之间为放置光伏组件的空间;在所述机架的一端安装数据采集电路。本发明只