
一种基于半监督学习的振动信号和图像特征机床刀具磨损状态监测方法.pdf

St****12


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于半监督学习的振动信号和图像特征机床刀具磨损状态监测方法.pdf
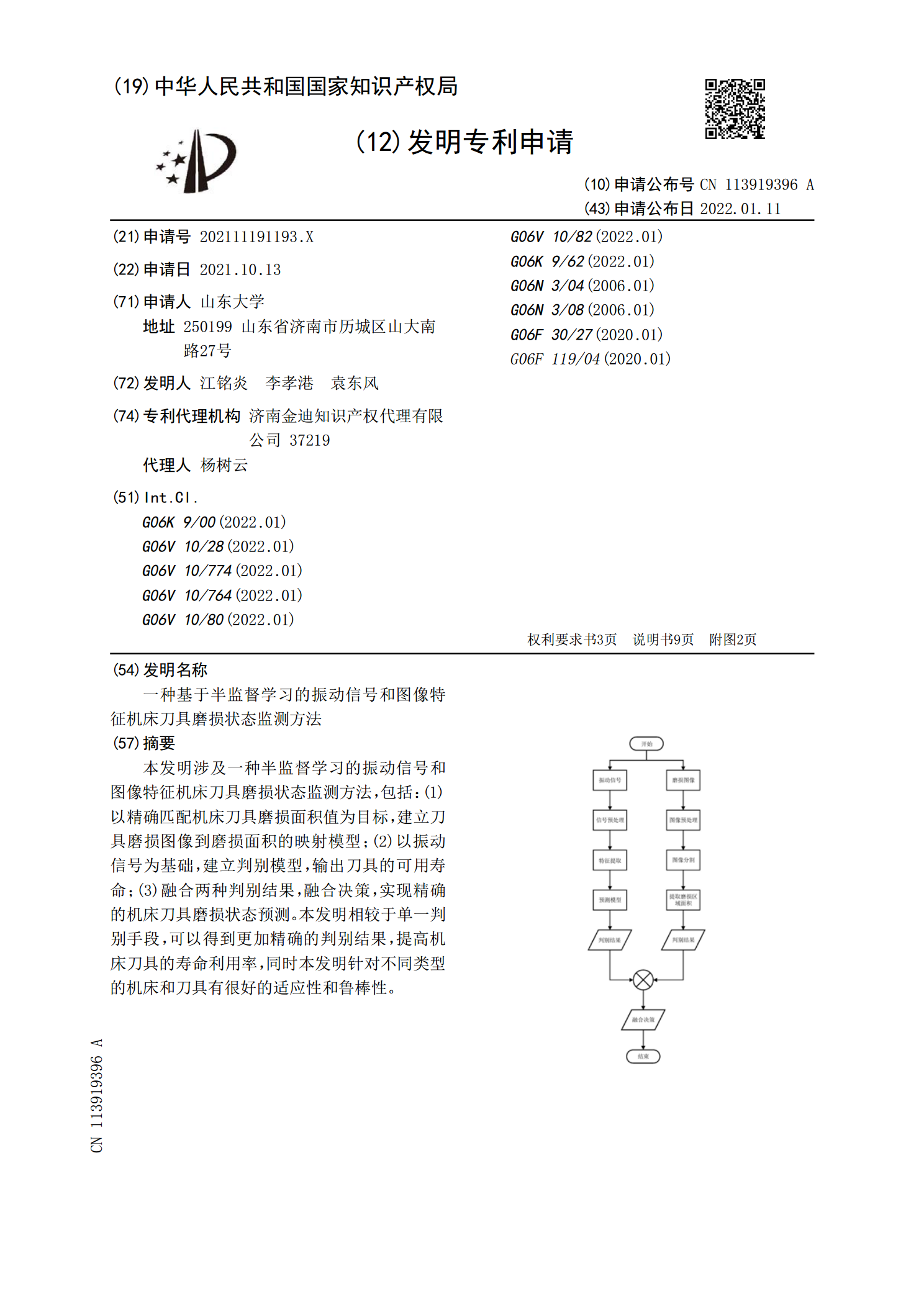
本发明涉及一种半监督学习的振动信号和图像特征机床刀具磨损状态监测方法,包括:(1)以精确匹配机床刀具磨损面积值为目标,建立刀具磨损图像到磨损面积的映射模型;(2)以振动信号为基础,建立判别模型,输出刀具的可用寿命;(3)融合两种判别结果,融合决策,实现精确的机床刀具磨损状态预测。本发明相较于单一判别手段,可以得到更加精确的判别结果,提高机床刀具的寿命利用率,同时本发明针对不同类型的机床和刀具有很好的适应性和鲁棒性。
一种基于机床振动信号的刀具状态监测系统及方法.pdf
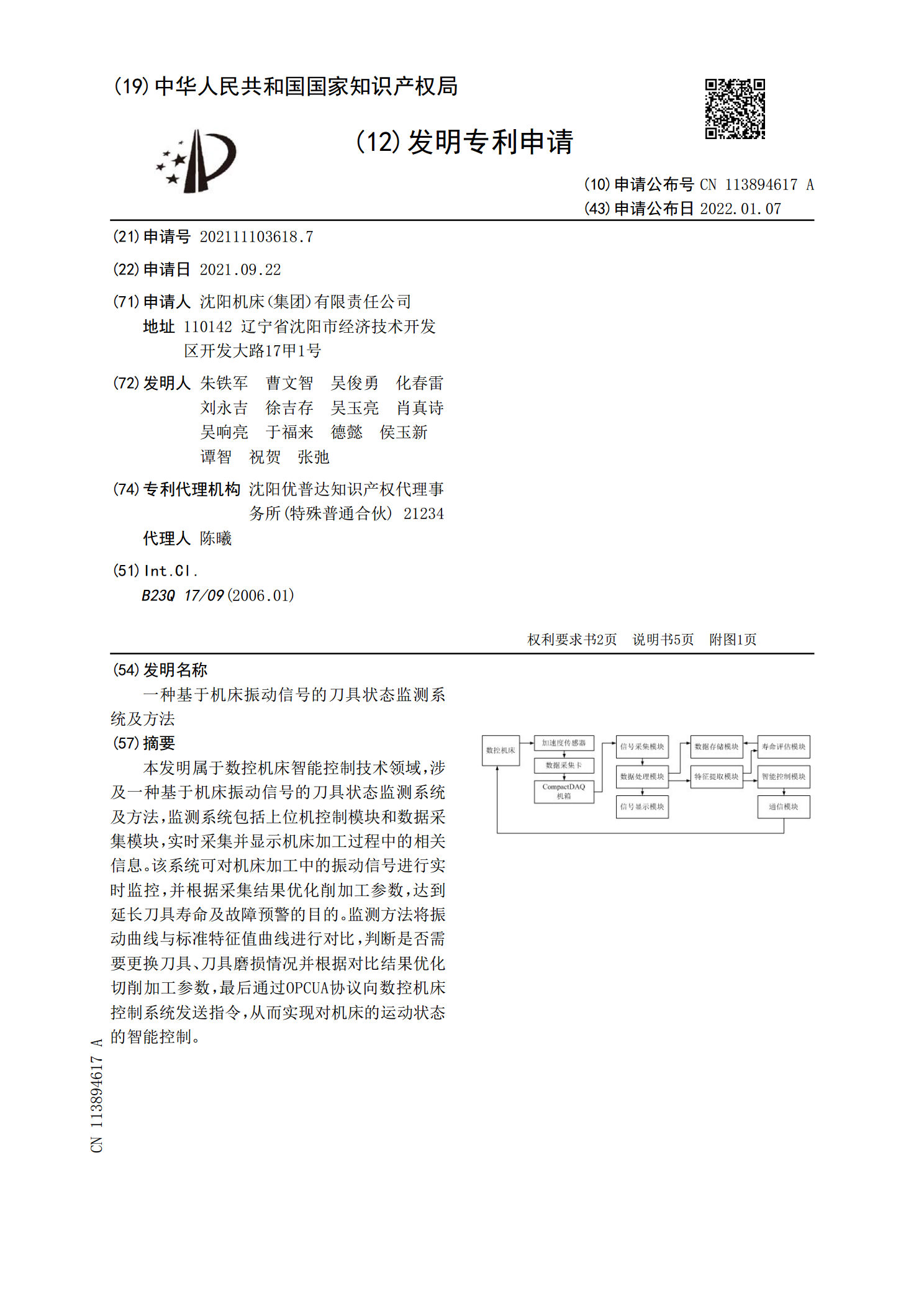
本发明属于数控机床智能控制技术领域,涉及一种基于机床振动信号的刀具状态监测系统及方法,监测系统包括上位机控制模块和数据采集模块,实时采集并显示机床加工过程中的相关信息。该系统可对机床加工中的振动信号进行实时监控,并根据采集结果优化削加工参数,达到延长刀具寿命及故障预警的目的。监测方法将振动曲线与标准特征值曲线进行对比,判断是否需要更换刀具、刀具磨损情况并根据对比结果优化切削加工参数,最后通过OPCUA协议向数控机床控制系统发送指令,从而实现对机床的运动状态的智能控制。

基于电流信号的刀具磨损状态监测方法研究.docx
基于电流信号的刀具磨损状态监测方法研究基于电流信号的刀具磨损状态监测方法研究摘要:随着制造业的发展,刀具在机械加工过程中扮演着至关重要的角色。然而,刀具的磨损是一个不可避免的问题,会严重影响加工质量和效率。因此,实时监测刀具磨损状态是十分必要的。本文提出了一种基于电流信号的刀具磨损状态监测方法,利用电流信号的特征参数对刀具的磨损程度进行监测和预测。实验结果表明,该方法具有良好的准确性和鲁棒性,能够有效地提高加工过程的稳定性和可靠性。关键词:刀具磨损,状态监测,电流信号,特征参数,预测1.引言随着制造业对产
一种基于振动信号和BP神经网络的刀具磨损状态评估方法.pdf
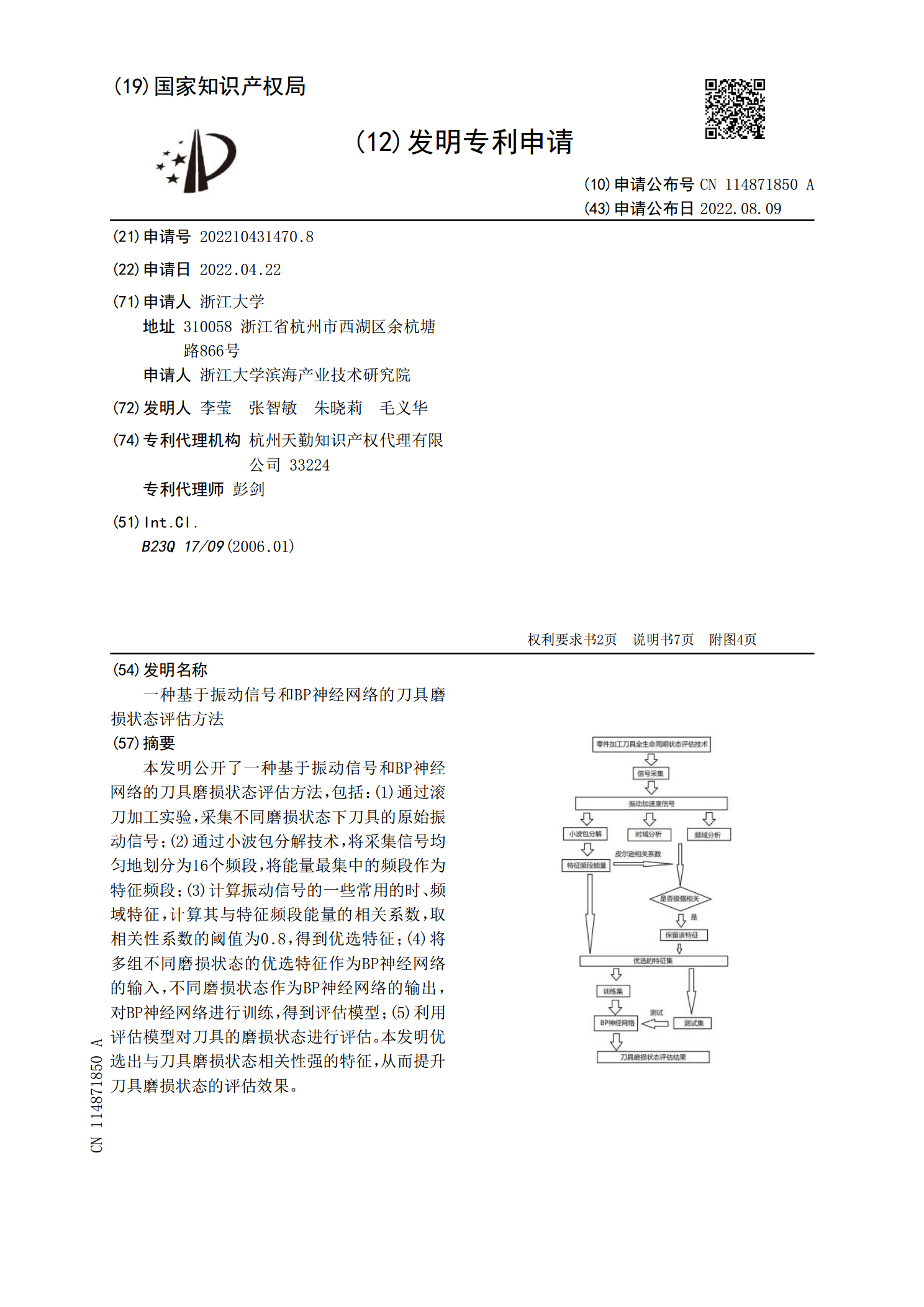
本发明公开了一种基于振动信号和BP神经网络的刀具磨损状态评估方法,包括:(1)通过滚刀加工实验,采集不同磨损状态下刀具的原始振动信号;(2)通过小波包分解技术,将采集信号均匀地划分为16个频段,将能量最集中的频段作为特征频段;(3)计算振动信号的一些常用的时、频域特征,计算其与特征频段能量的相关系数,取相关性系数的阈值为0.8,得到优选特征;(4)将多组不同磨损状态的优选特征作为BP神经网络的输入,不同磨损状态作为BP神经网络的输出,对BP神经网络进行训练,得到评估模型;(5)利用评估模型对刀具的磨损状态

基于振动测试的数控机床刀具磨损监测方法.docx
基于振动测试的数控机床刀具磨损监测方法基于振动测试的数控机床刀具磨损监测方法摘要:随着数控技术的不断发展和应用,数控机床在现代工业生产中扮演着越来越重要的角色。而刀具作为数控机床的核心配件之一,其磨损情况直接影响到加工质量和效率。因此,通过研究刀具磨损监测方法,可以实现刀具状态的实时监测和预测,从而及时采取措施,提高加工质量和效率。振动测试作为一种有效的刀具磨损监测方法,在本文中进行了探讨和分析。关键词:数控机床,刀具磨损,振动测试,监测方法一、引言数控机床作为现代工业中的重要设备,其高效率和高精度的特点