
一种低空无人机多源融合定位方法.pdf

和裕****az

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种低空无人机多源融合定位方法.pdf
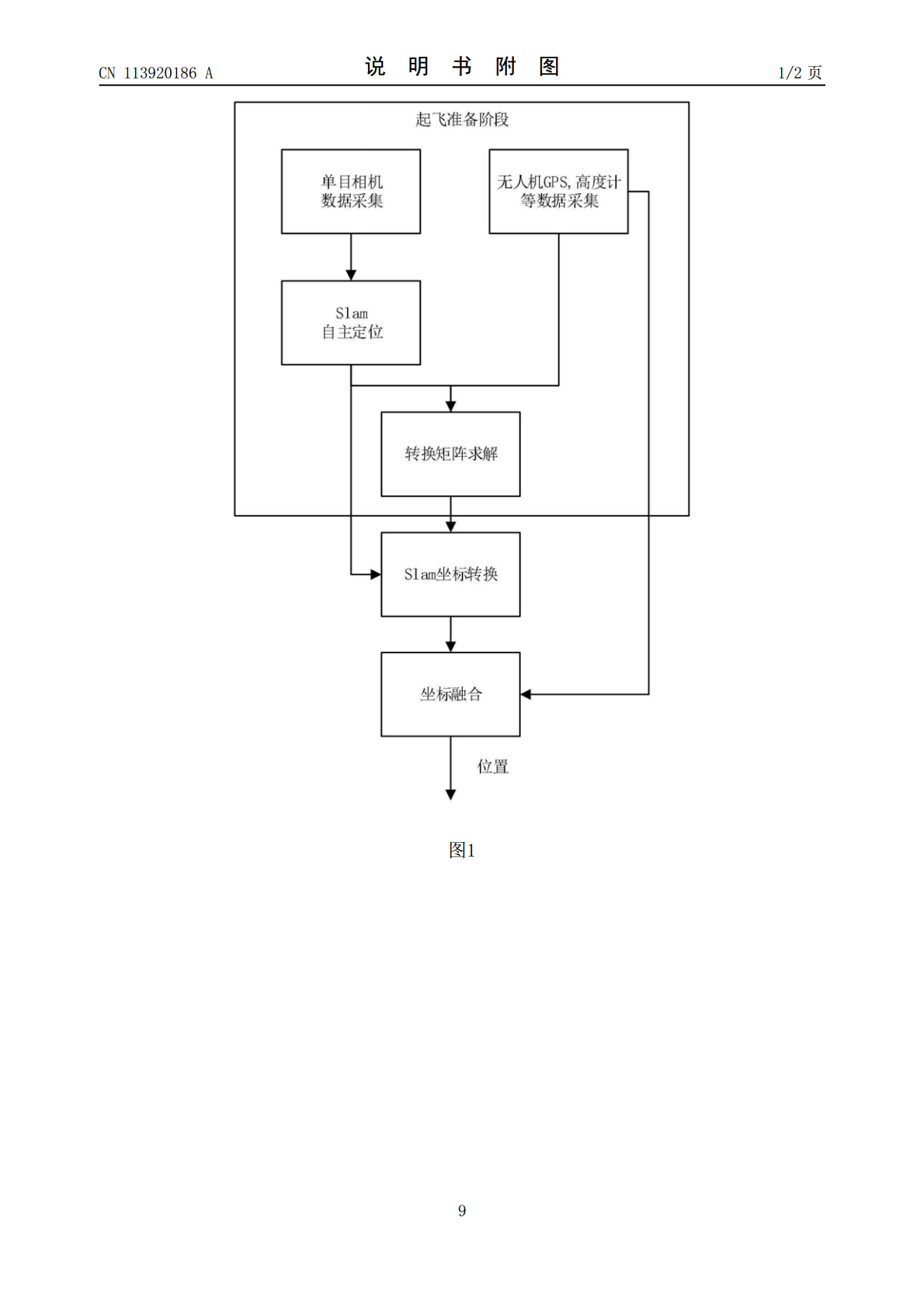
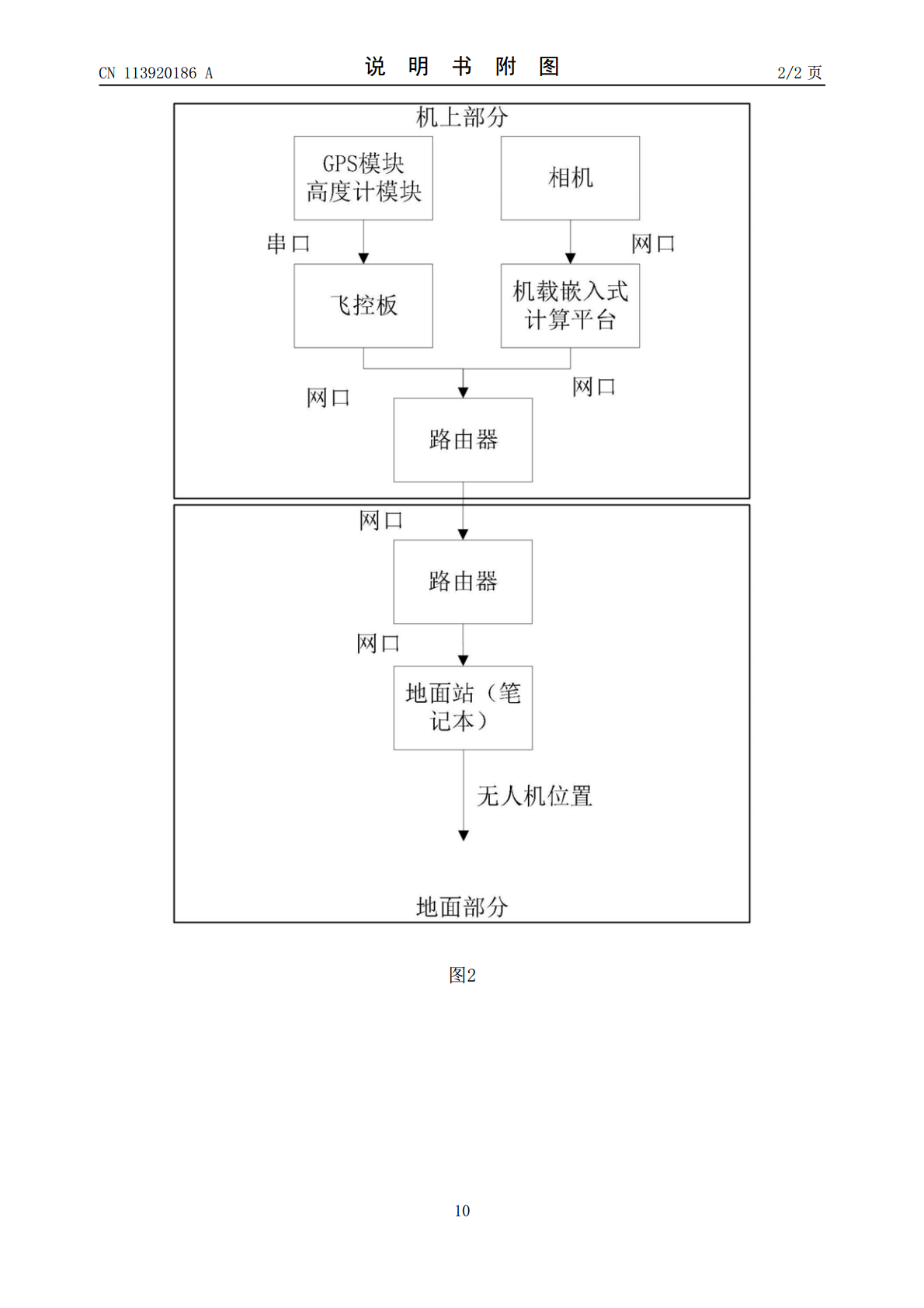
本发明公开了一种低空无人机多源融合定位方法,属于无人机自主飞行领域。该方法针对低空无人机的飞行高度等特点,提出了基于单目视觉与卫导、高度计融合的多源定位方法,首先通过无人机的位置变化恢复了单目视觉SLAM的尺度,然后通过将经纬度坐标系转换为东北天坐标系解决了两个坐标系之间的转换问题,成功解决了低空无人机在拒止环境中的自主定位难题。

一种改进的多源信息融合室内定位方法.pptx
,目录PartOnePartTwo室内定位的重要性现有室内定位技术的局限性多源信息融合室内定位方法的优势改进多源信息融合室内定位方法的必要性PartThree引入新的信息源信息预处理和特征提取建立多源信息融合模型优化算法和参数调整PartFour数据采集和预处理特征提取和匹配位置估计和误差修正结果输出和展示PartFive实验环境和数据集介绍定位精度和稳定性的比较分析算法性能的全面评估与其他室内定位方法的对比分析PartSix智能家居和物联网领域的应用商场、医院等公共场所的应用地下空间和隧道等特殊环境的应

一种基于多预测图融合网络的无人机视觉定位方法.pdf
本发明公开了一种基于多预测图融合网络的无人机视觉定位方法。利用无人机俯视拍摄搜索区域的无人机图片,截取卫星图片定位信息,标记无人机位置;将无人机图片和卫星图片传入神经网络中处理获得无人机在卫星图片中的位置;将预先获得的无人机图片、卫星图片以及无人机在卫星图片中的位置区域输入到神经网络中进行训练;将实时飞行时采集的无人机图片输入训练后的特征提取网络中预测处理获得无人机的定位信息。本发明使用了孪生网络,在训练过程中引入了新的损失计算,通过特征金字塔结构以及多预测图融合网络解决了位置信息缺失和多尺度问题。

无人机多源侦察图像融合方法研究.pptx
无人机多源侦察图像融合方法研究目录无人机多源侦察图像融合技术概述无人机多源侦察图像融合的定义无人机多源侦察图像融合的目的和意义无人机多源侦察图像融合的基本原理无人机多源侦察图像融合方法分类基于像素级的图像融合方法基于特征级的图像融合方法基于决策级的图像融合方法无人机多源侦察图像融合算法研究图像预处理算法图像配准算法图像融合算法无人机多源侦察图像融合实验与分析实验数据来源与处理实验方案设计与实施实验结果分析结果比较与讨论无人机多源侦察图像融合技术应用前景与展望无人机多源侦察图像融合技术的应用领域无人机多源侦

一种基于多源融合的井下人员定位系统及方法.pdf
本发明公开了一种基于多源融合的井下人员定位系统及方法,包括地面监控中心、上层终端、通信主干网、网关节点、总线、定位锚节点、位置信标和移动节点,针对煤矿井下人员定位技术精度低、定位盲区多,实现全覆盖成本高等问题,本发明采用电磁波一维粗定位与惯导高精度定位相结合的方法,根据需要,不需要高精度定位的区域使用电磁波粗定位,以节省移动节点的电量消耗,需要高精度定位区域,使用惯性导航高精度定位,上位机软件可以发送定位切换命令给指定的移动节点,需要了解其精确的位置和行走轨迹时,将惯导定位数据传输给定位锚节点,以减小定位