
预测轨道不平顺的模型生成方法和轨道不平顺的预测方法.pdf

是你****枝呀

1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

预测轨道不平顺的模型生成方法和轨道不平顺的预测方法.pdf
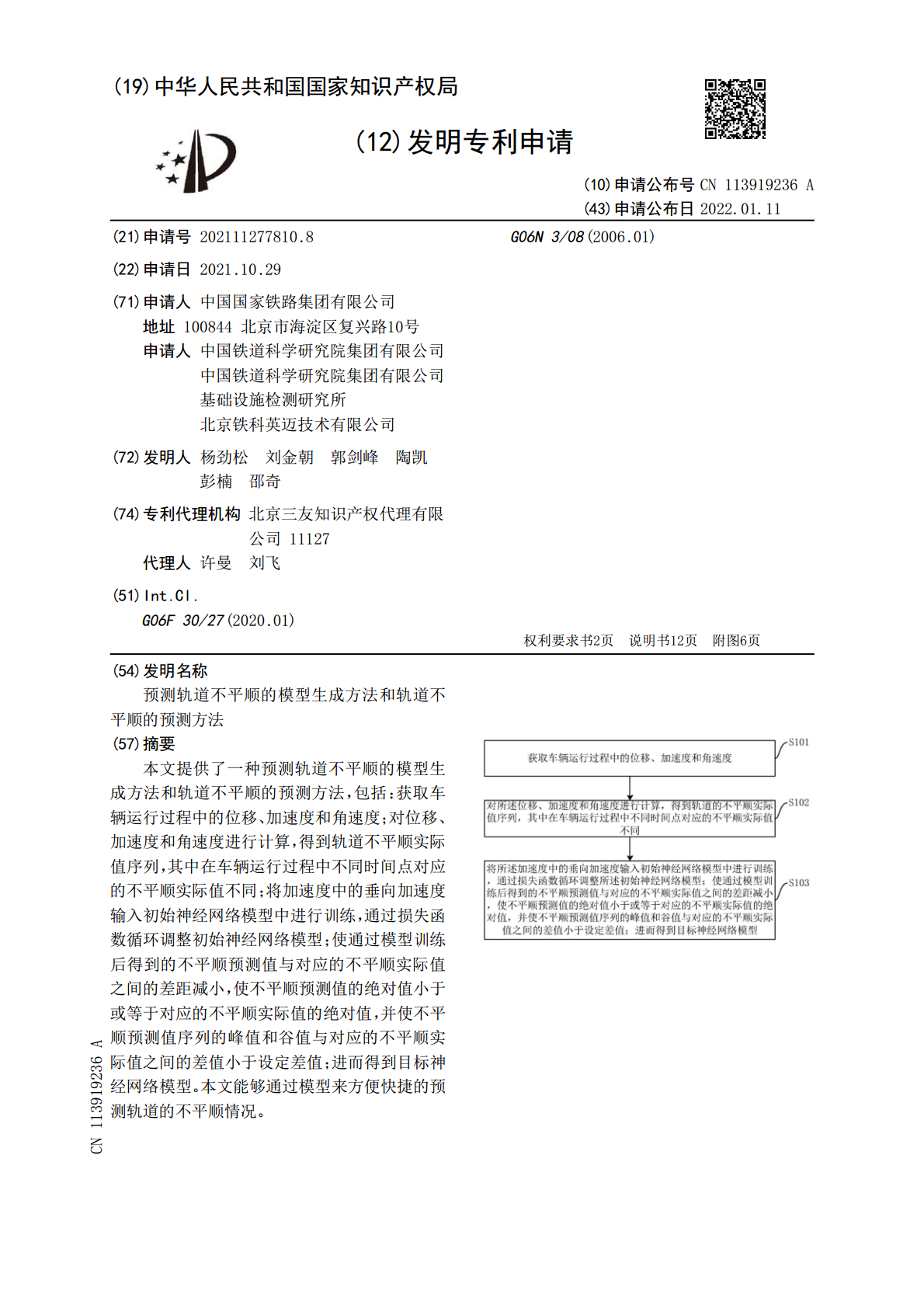
本文提供了一种预测轨道不平顺的模型生成方法和轨道不平顺的预测方法,包括:获取车辆运行过程中的位移、加速度和角速度;对位移、加速度和角速度进行计算,得到轨道不平顺实际值序列,其中在车辆运行过程中不同时间点对应的不平顺实际值不同;将加速度中的垂向加速度输入初始神经网络模型中进行训练,通过损失函数循环调整初始神经网络模型;使通过模型训练后得到的不平顺预测值与对应的不平顺实际值之间的差距减小,使不平顺预测值的绝对值小于或等于对应的不平顺实际值的绝对值,并使不平顺预测值序列的峰值和谷值与对应的不平顺实际值之间的差值

轨道不平顺预测随机模型的SVM-MC求解方法.docx
轨道不平顺预测随机模型的SVM-MC求解方法标题:基于SVM-MC的轨道不平顺预测随机模型求解方法摘要:轨道不平顺问题是铁路运输系统中非常重要的研究领域之一。本文提出一种基于支持向量机多分类(SVM-MC)的随机模型求解方法,用于预测轨道不平顺情况。该方法能够有效地进行轨道不平顺预测,提高铁路系统的运行效率和安全性。引言:随着铁路运输系统的不断发展,轨道不平顺问题对系统的安全性和运行效率提出了新的要求。预测轨道不平顺情况对于及时维修和提前采取措施来减少事故的发生至关重要。传统的预测方法一般基于经验和统计模

轨道几何不平顺预测方法的研究.docx
轨道几何不平顺预测方法的研究轨道几何不平顺预测方法的研究摘要:随着科技的不断发展,人类对于航空航天技术的研究越来越深入,其中一项重要的研究领域就是轨道几何。在航天领域,轨道几何不平顺往往会对飞行器造成严重的危害,因此对于轨道几何不平顺的预测方法的研究显得尤为重要。本文针对轨道几何不平顺的预测方法进行了深入的探讨和研究,总结了目前主要的轨道几何不平顺预测方法,并对其优缺点进行了分析和评价,最终提出了一种基于神经网络的轨道几何不平顺预测方法。关键词:轨道几何;不平顺;预测方法;神经网络1、引言在航天领域中,轨

基于高铁轨道不平顺的车轮不圆顺识别模型.docx
基于高铁轨道不平顺的车轮不圆顺识别模型基于高铁轨道不平顺的车轮不圆顺识别模型摘要:高铁是目前世界上最先进的铁路交通方式之一,其运行速度快、安全性高,受到广泛的关注和应用。然而,高铁在运行过程中经常遇到的问题之一是轨道不平顺对车轮的摩擦和磨损产生不利影响,甚至可能导致车辆失控。因此,研究并提出一种有效的车轮不圆顺识别模型对于高铁运行的安全性和可靠性具有重要意义。关键词:高铁,轨道不平顺,车轮不圆顺,识别模型引言随着经济的快速发展和城市化进程的加快,高铁作为快速、便捷、舒适的铁路交通方式正在全球范围内得到广泛

基于组合预测模型的轨道不平顺预测研究的中期报告.docx
基于组合预测模型的轨道不平顺预测研究的中期报告一、研究背景和意义随着铁路交通的发展,铁路运输已成为城市间、城乡间重要的交通方式之一。然而,长期以来,铁路路面不平顺一直是影响列车运行安全和舒适性的重要因素之一。因此,预测轨道不平顺并采取相应的维护和修复措施,对于确保列车运行安全和乘车舒适性以及延长轨道使用寿命具有重要意义。当前,轨道不平顺的预测研究主要集中在基于经验公式和力学模型的方法上。然而,这些方法往往需要大量的试验数据和手动输入的参数,计算复杂度高且耗时长,同时在实际应用中预测精度有限。因此,开发基于