
基于改进多目标粒子群算法的粘滞阻尼器参数优化方法.pdf

fa****楠吖

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进多目标粒子群算法的粘滞阻尼器参数优化方法.pdf
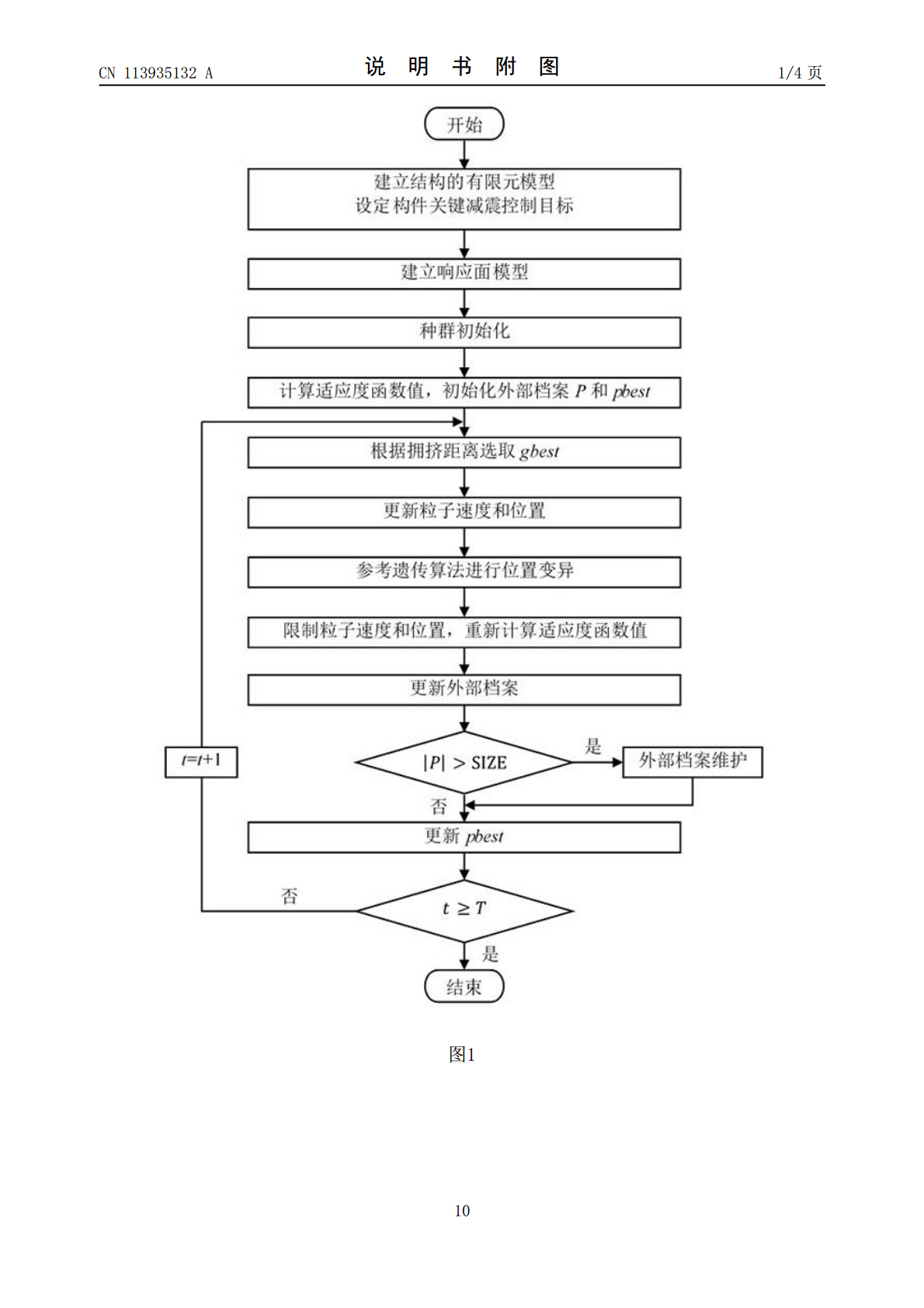
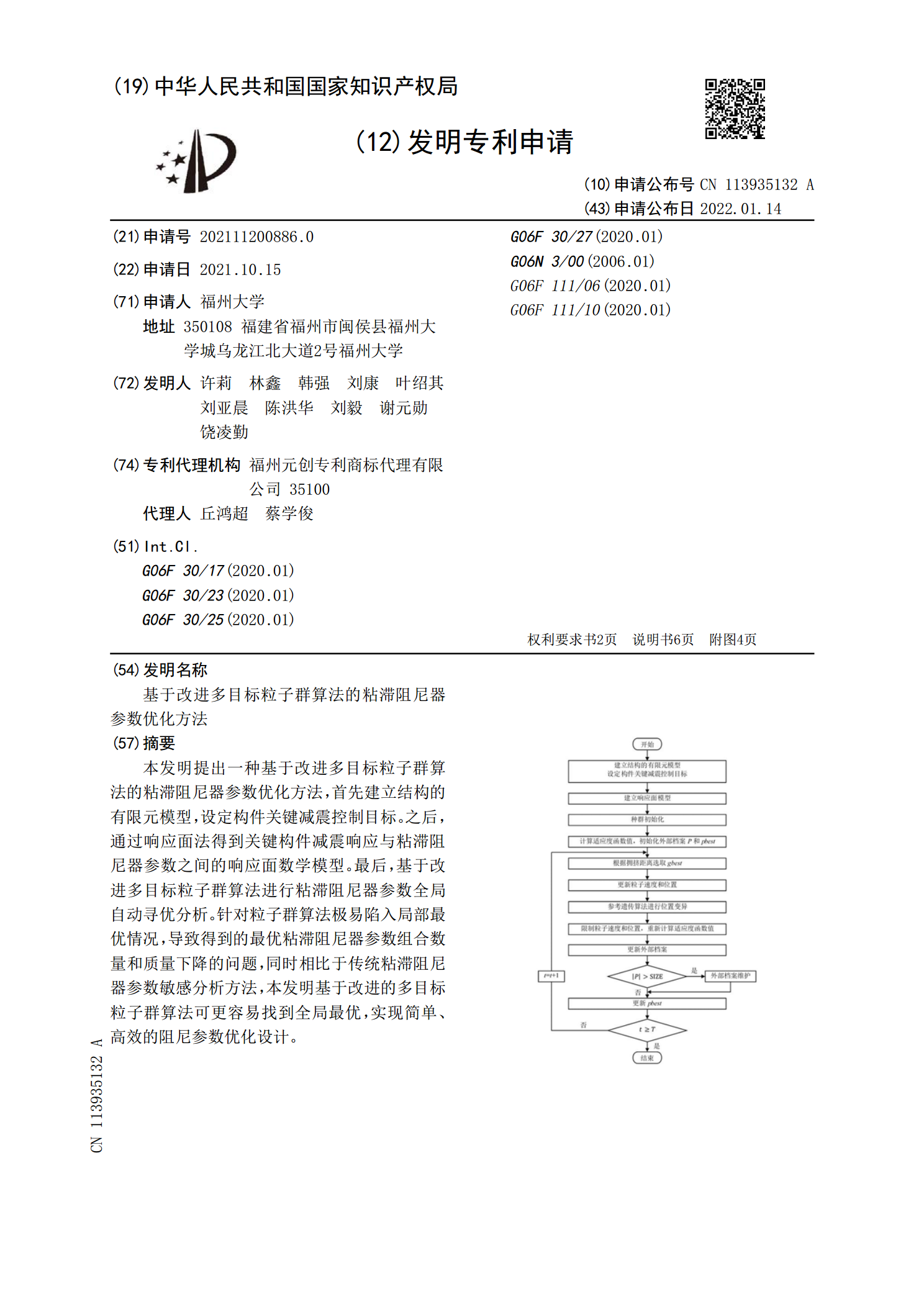
本发明提出一种基于改进多目标粒子群算法的粘滞阻尼器参数优化方法,首先建立结构的有限元模型,设定构件关键减震控制目标。之后,通过响应面法得到关键构件减震响应与粘滞阻尼器参数之间的响应面数学模型。最后,基于改进多目标粒子群算法进行粘滞阻尼器参数全局自动寻优分析。针对粒子群算法极易陷入局部最优情况,导致得到的最优粘滞阻尼器参数组合数量和质量下降的问题,同时相比于传统粘滞阻尼器参数敏感分析方法,本发明基于改进的多目标粒子群算法可更容易找到全局最优,实现简单、高效的阻尼参数优化设计。
基于改进多目标混合粒子群算法的汽车传动参数优化方法.pdf
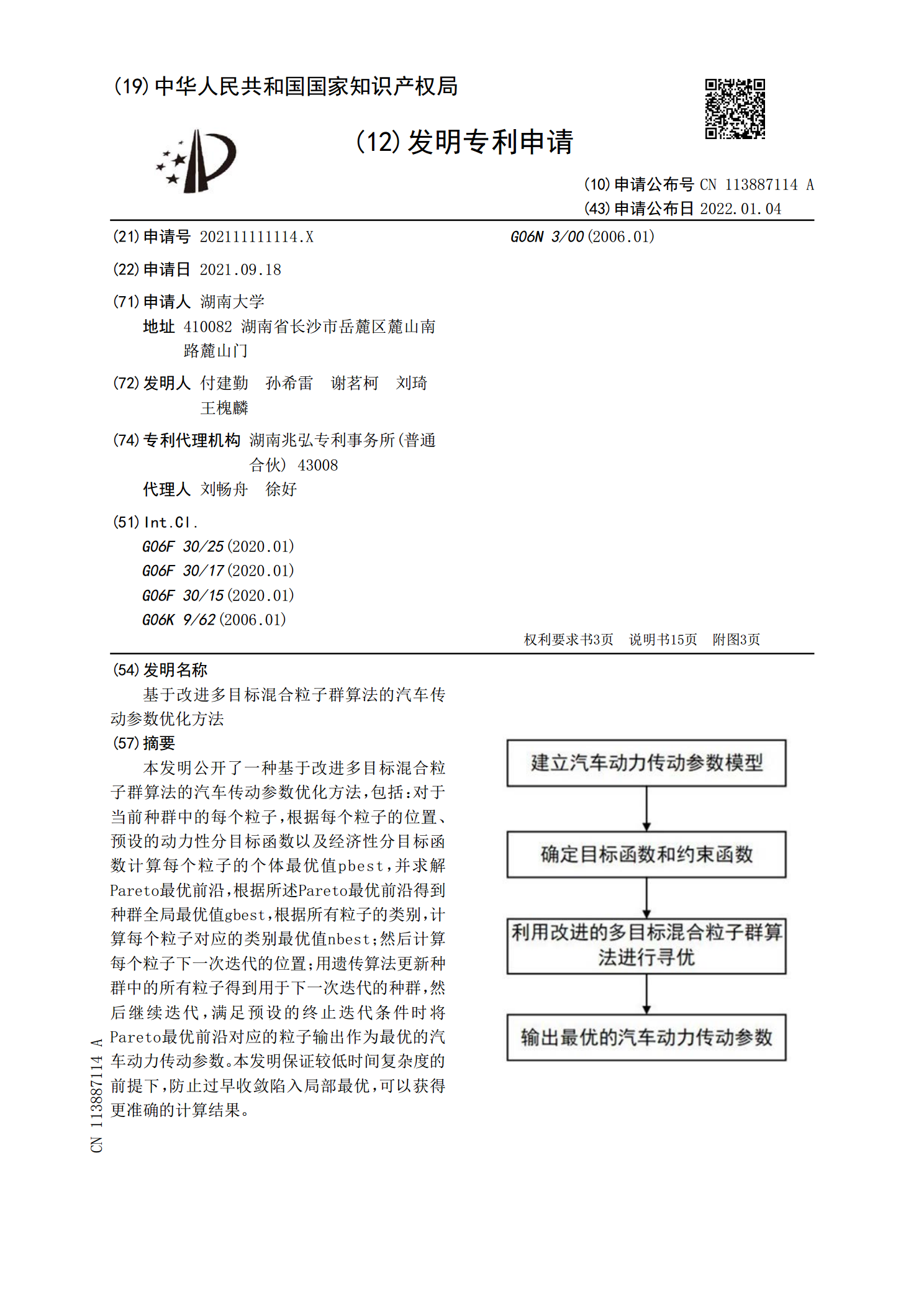
本发明公开了一种基于改进多目标混合粒子群算法的汽车传动参数优化方法,包括:对于当前种群中的每个粒子,根据每个粒子的位置、预设的动力性分目标函数以及经济性分目标函数计算每个粒子的个体最优值pbest,并求解Pareto最优前沿,根据所述Pareto最优前沿得到种群全局最优值gbest,根据所有粒子的类别,计算每个粒子对应的类别最优值nbest;然后计算每个粒子下一次迭代的位置;用遗传算法更新种群中的所有粒子得到用于下一次迭代的种群,然后继续迭代,满足预设的终止迭代条件时将Pareto最优前沿对应的粒子输出作

基于改进粒子群算法的同步器多目标参数优化.pptx
,目录PartOnePartTwo粒子群算法的基本原理粒子群算法的优缺点改进粒子群算法的必要性PartThree惯性权重的调整加速常数的调整动态调整粒子群规模引入变异算子PartFour同步器的作用和功能多目标参数优化的含义和目标同步器多目标参数优化的挑战和难点PartFive编码方式的选择适应度函数的构建初始化粒子和种群改进粒子群算法的迭代过程参数优化结果的输出和展示PartSix实验环境和数据准备实验过程和结果展示结果分析和比较参数优化效果的评估和讨论PartSeven基于改进粒子群算法的同步器多目标
基于改进粒子群算法的电机多目标优化方法.pdf
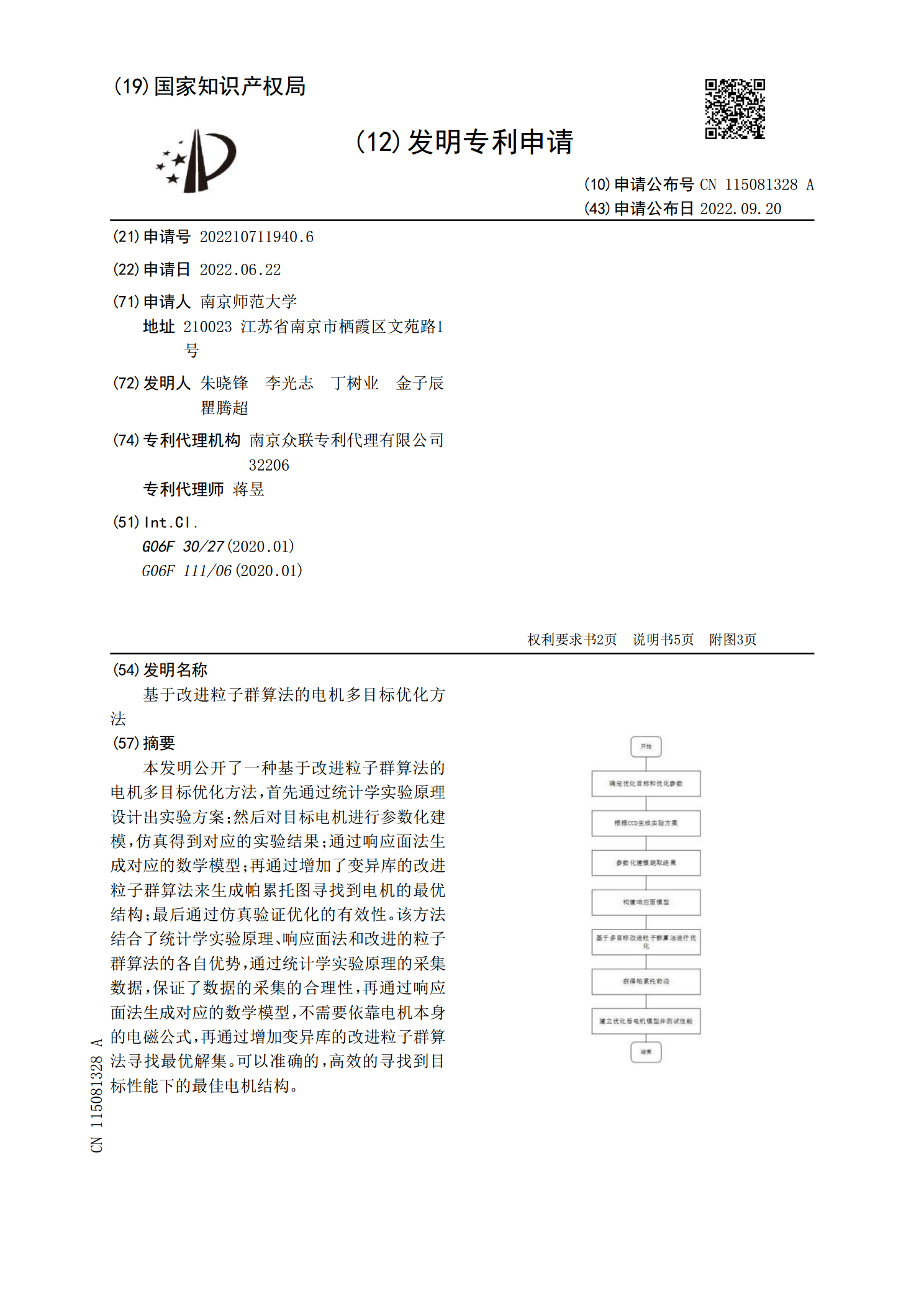
本发明公开了一种基于改进粒子群算法的电机多目标优化方法,首先通过统计学实验原理设计出实验方案;然后对目标电机进行参数化建模,仿真得到对应的实验结果;通过响应面法生成对应的数学模型;再通过增加了变异库的改进粒子群算法来生成帕累托图寻找到电机的最优结构;最后通过仿真验证优化的有效性。该方法结合了统计学实验原理、响应面法和改进的粒子群算法的各自优势,通过统计学实验原理的采集数据,保证了数据的采集的合理性,再通过响应面法生成对应的数学模型,不需要依靠电机本身的电磁公式,再通过增加变异库的改进粒子群算法寻找最优解集

基于改进的粒子群算法的钻进参数多目标优化研究综述报告.docx
基于改进的粒子群算法的钻进参数多目标优化研究综述报告随着钻进工具和设备的不断提升,钻进操作的安全和效率得到了很大的保障和提高。在钻进过程中,钻进参数的设置对钻井效果和工具寿命有着重要的影响,因此如何优化钻进参数成为了一个重要的研究课题。钻进参数优化的目的是将钻进过程中的钻井时间、费用和钻井效果等进行平衡,使得钻井效率最大化。近年来,多目标优化技术在钻进参数优化中得到了广泛应用,其中改进的粒子群算法(ImprovedParticleSwarmOptimization,IPSO)是一种流行的多目标优化方法,在