
辅助泊车的方法、装置、存储介质、电子设备及车辆.pdf

一只****呀9


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

辅助泊车的方法、装置、存储介质、电子设备及车辆.pdf
本公开涉及一种辅助泊车的方法、装置、存储介质、电子设备及车辆,所述方法包括:确定车辆待泊入的目标车位;根据该目标车位确定目标泊车起始区域;根据车辆的当前行驶速度,以及车辆的当前位置到该目标泊车起始区域的最远距离,计算车辆的目标减速度值;根据该目标减速度值执行减速度控制策略,以使车辆减速行驶,并停入该目标泊车起始区域。这样,通过该方法可以辅助驾驶员将车辆准确停止在泊车起始区域,避免由于驾驶员操作不熟练,车辆无法停止到对应泊车起始区域,导致泊车失败或泊车效率低下的问题,可以明显提高泊车入库的效率和成功率。

车辆辅助控制方法、装置、存储介质及电子设备.pdf
本公开公开了一种车辆辅助控制方法、装置、存储介质及电子设备,尤其涉及辅助驾驶技术领域。其中,具体实现方案为:获取车辆的速度及所述车辆的速度方向对应的障碍物或禁行区的最短距离;在所述最短距离小于或等于预设距离且所述车辆的速度指示所述车辆处于静止状态的情况下,监测所述车辆的制动控制信息;基于所述制动控制信息,生成辅助控制提示信息。由此,人们在驾驶过程中,可以准确判断驾驶员的掉头需求,结合计算机的计算提供给驾驶员便利性的操作信息,的在保证人车安全距离的前提下,降低换档的次数,缩短整体掉头所需的时间,降低对驾驶员
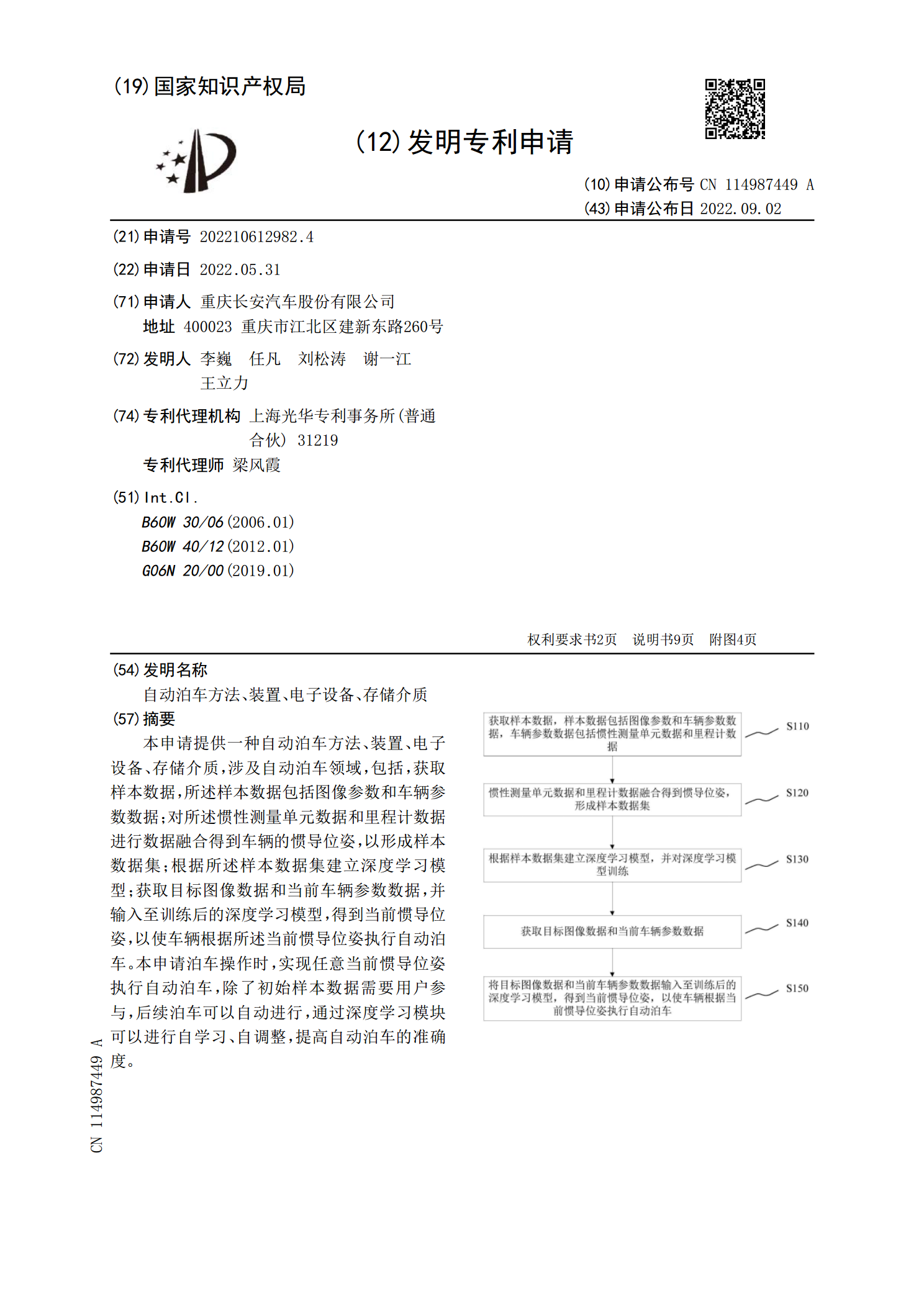
自动泊车方法、装置、电子设备、存储介质.pdf
本申请提供一种自动泊车方法、装置、电子设备、存储介质,涉及自动泊车领域,包括,获取样本数据,所述样本数据包括图像参数和车辆参数数据;对所述惯性测量单元数据和里程计数据进行数据融合得到车辆的惯导位姿,以形成样本数据集;根据所述样本数据集建立深度学习模型;获取目标图像数据和当前车辆参数数据,并输入至训练后的深度学习模型,得到当前惯导位姿,以使车辆根据所述当前惯导位姿执行自动泊车。本申请泊车操作时,实现任意当前惯导位姿执行自动泊车,除了初始样本数据需要用户参与,后续泊车可以自动进行,通过深度学习模块可以进行自学
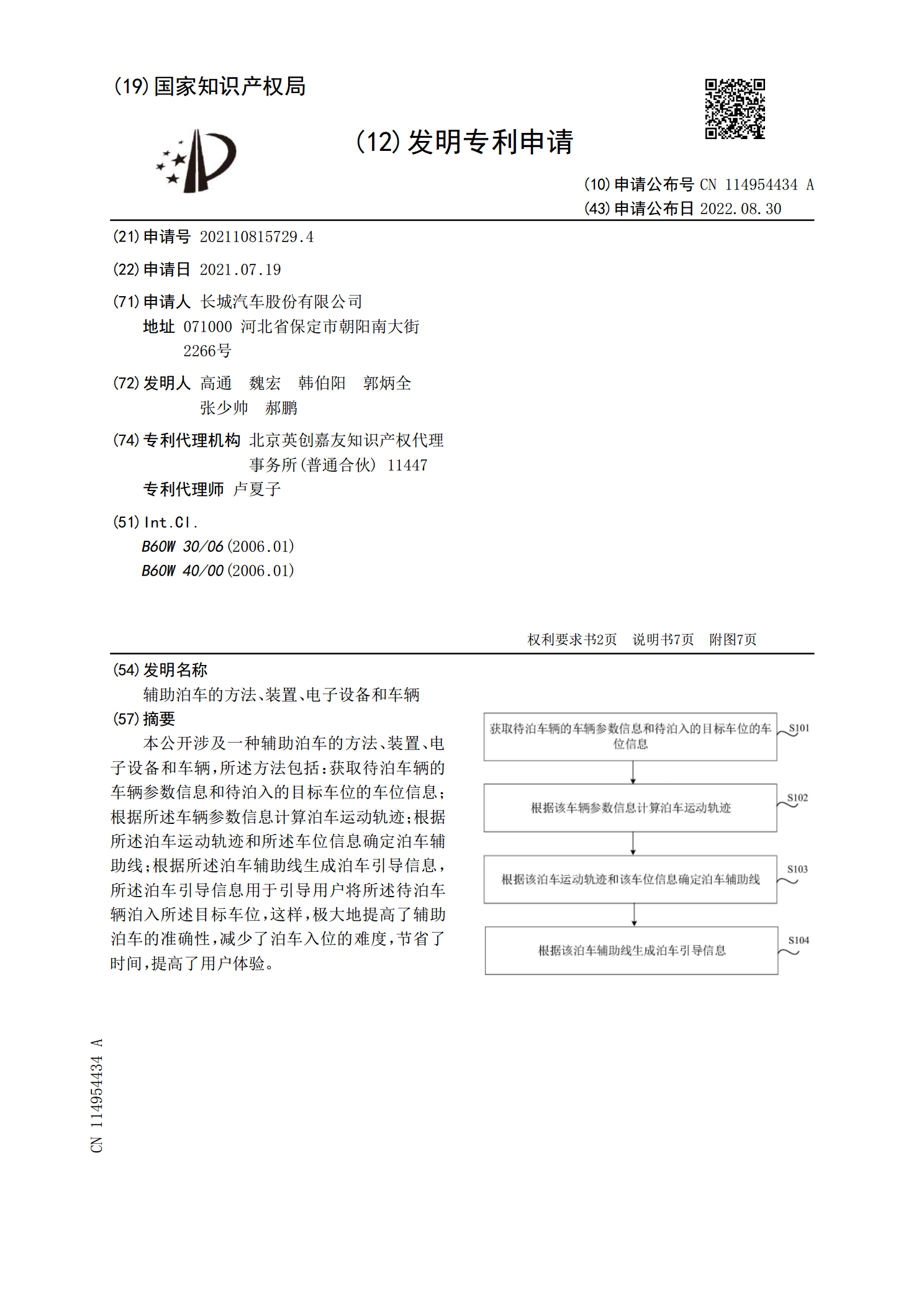
辅助泊车的方法、装置、电子设备和车辆.pdf
本公开涉及一种辅助泊车的方法、装置、电子设备和车辆,所述方法包括:获取待泊车辆的车辆参数信息和待泊入的目标车位的车位信息;根据所述车辆参数信息计算泊车运动轨迹;根据所述泊车运动轨迹和所述车位信息确定泊车辅助线;根据所述泊车辅助线生成泊车引导信息,所述泊车引导信息用于引导用户将所述待泊车辆泊入所述目标车位,这样,极大地提高了辅助泊车的准确性,减少了泊车入位的难度,节省了时间,提高了用户体验。

车辆泊车的控制方法、装置、介质、电子设备.pdf
本申请涉及车辆控制技术领域,揭示了一种车辆泊车的控制方法、装置、介质及电子设备。该方法包括:通过所述摄像装置采集目标车位区域的边界信息,并基于所述边界信息确定所述车辆的泊车轨迹;按照所述泊车轨迹,控制所述车辆向所述目标车位区域运动;在通过所述磁感应装置检测到位于所述目标车位区域的磁导引线时,获取所述磁感应装置相对于所述磁导引线的磁场信息;基于所述磁场信息,控制所述车辆运动至所述目标车位区域的目标位置。本申请通过参考磁导引线的磁场信息进行泊车,能够提高车辆的泊车精度。