
容器定位方法、装置、容器存取设备及存储介质.pdf

宜然****找我


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

容器定位方法、装置、容器存取设备及存储介质.pdf
本发明提供一种容器定位方法、装置、容器存取设备及存储介质,容器定位方法包括:获取图像传感器采集的图像,其中,图像携带各像素的像素信息,像素信息包括颜色数据和/或深度数据;根据图像中各像素的像素信息,确定图像中的候选容器区域;根据候选容器区域中各像素的像素信息对候选容器区域进行像素扩展,得到容器定位区域;获得容器定位区域的边缘位置信息,根据边缘位置信息,确定目标容器的定位结果。对候选容器区域进行像素扩展时,将颜色数据和深度数据相互补偿,得到的容器定位区域能够适应不同情况的容器,则根据容器定位区域的边缘位置信

容器运行方法、装置、设备及存储介质.pdf
本申请实施例公开了一种容器运行方法、装置、设备及存储介质,属于计算机技术领域。该方法包括:启动文件缓存容器,所述文件缓存容器由第一容器启动;响应于所述第一容器的嵌套容器构建指令,将目标镜像文件存储至所述文件缓存容器,所述嵌套容器构建指令用于指示在所述第一容器中构建第二容器,所述目标镜像文件用于支持所述第二容器的运行;响应于所述第二容器的运行指令,在所述文件缓存容器中获取所述目标镜像文件,并基于所述目标镜像文件运行所述第二容器。本申请实施例中,可直接在文件缓存容器中获取目标镜像文件,进而基于目标镜像文件运行

应用容器监控方法、装置、设备及存储介质.pdf
本发明属于计算机技术领域,公开了一种应用容器监控方法、装置、设备及存储介质。本发明通过在检测到运行环境信息满足任务触发条件时,获取任务触发条件对应的监控任务;根据监控任务确定目标应用容器,并对目标应用容器进行数据采集,获得监控指标数据;在监控到监控指标数据满足预设告警条件时,根据目标应用容器及监控指标数据进行风险告警。由于根据监控任务可以直接确定需要监控的业务应用对应的目标应用容器,然后对目标应用容器进行数据采集,再在监控到的监控指标数据满足预设告警条件时进行风险告警,从而保证了可及时发现业务应用的异常,
容器复用方法、装置、设备以及存储介质.pdf
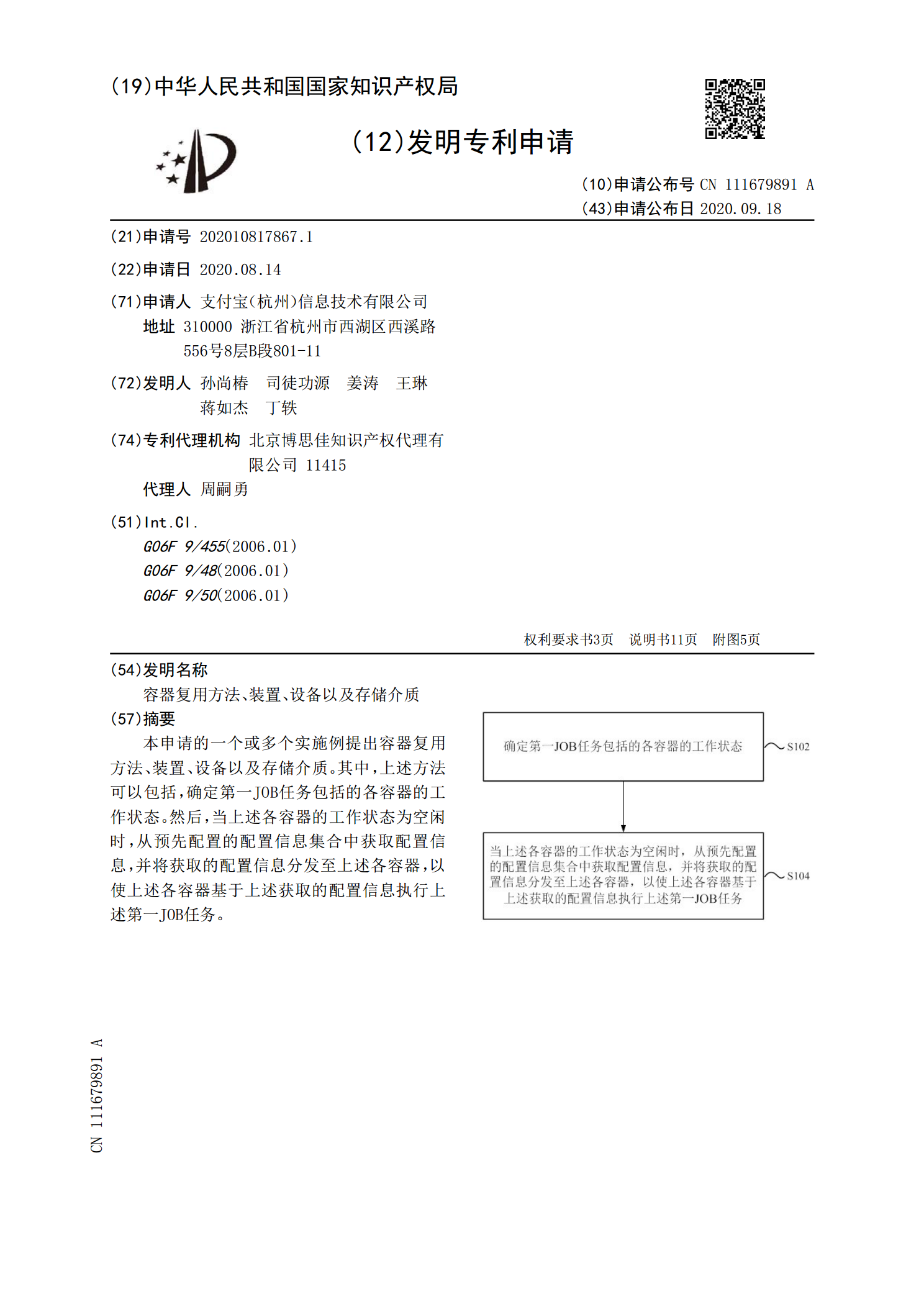
本申请的一个或多个实施例提出容器复用方法、装置、设备以及存储介质。其中,上述方法可以包括,确定第一JOB任务包括的各容器的工作状态。然后,当上述各容器的工作状态为空闲时,从预先配置的配置信息集合中获取配置信息,并将获取的配置信息分发至上述各容器,以使上述各容器基于上述获取的配置信息执行上述第一JOB任务。
容器控制方法、容器控制装置、电子设备和存储介质.pdf
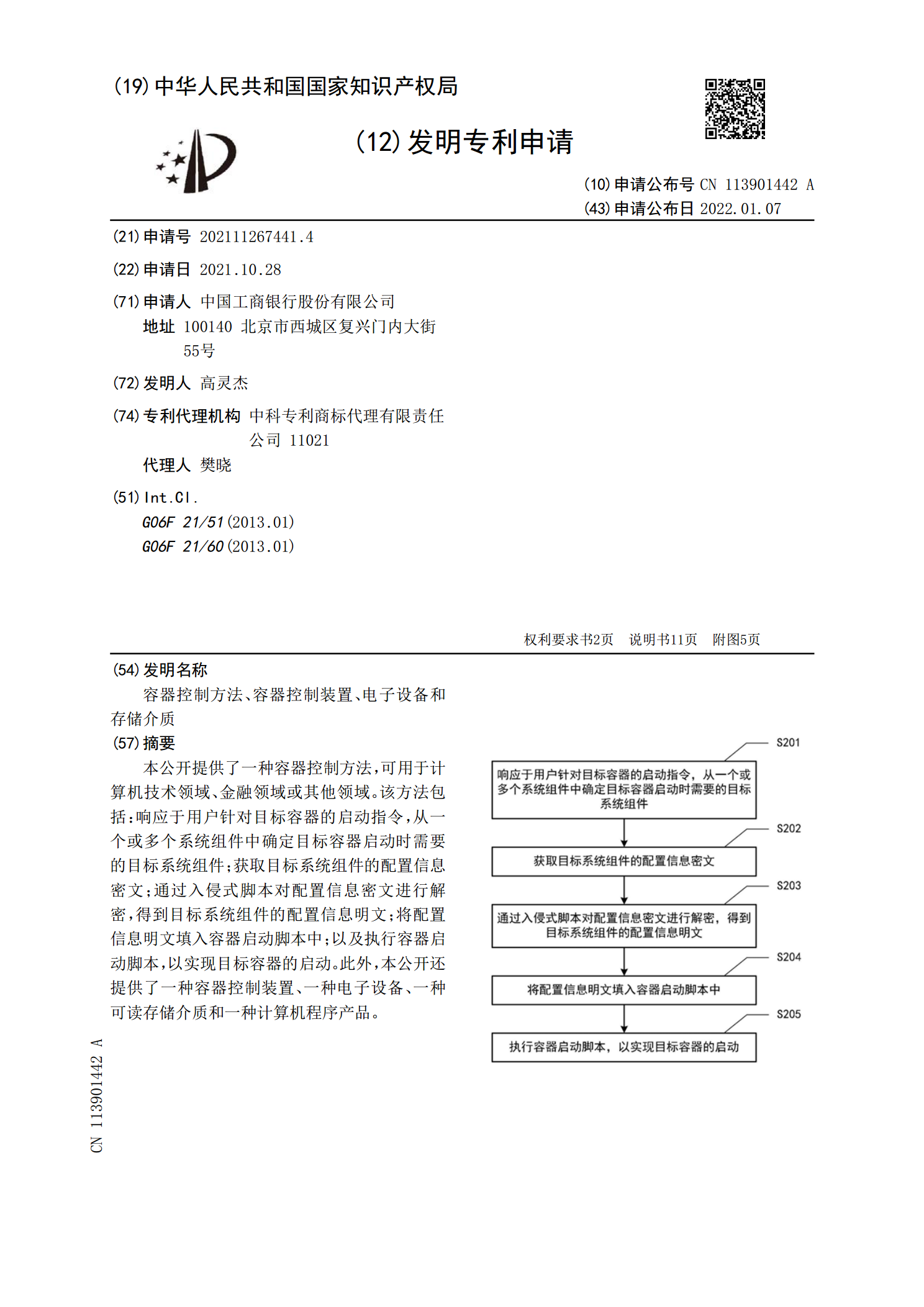
本公开提供了一种容器控制方法,可用于计算机技术领域、金融领域或其他领域。该方法包括:响应于用户针对目标容器的启动指令,从一个或多个系统组件中确定目标容器启动时需要的目标系统组件;获取目标系统组件的配置信息密文;通过入侵式脚本对配置信息密文进行解密,得到目标系统组件的配置信息明文;将配置信息明文填入容器启动脚本中;以及执行容器启动脚本,以实现目标容器的启动。此外,本公开还提供了一种容器控制装置、一种电子设备、一种可读存储介质和一种计算机程序产品。