
外骨骼装置控制方法及外骨骼装置.pdf

努力****星驰

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
外骨骼装置控制方法及外骨骼装置.pdf
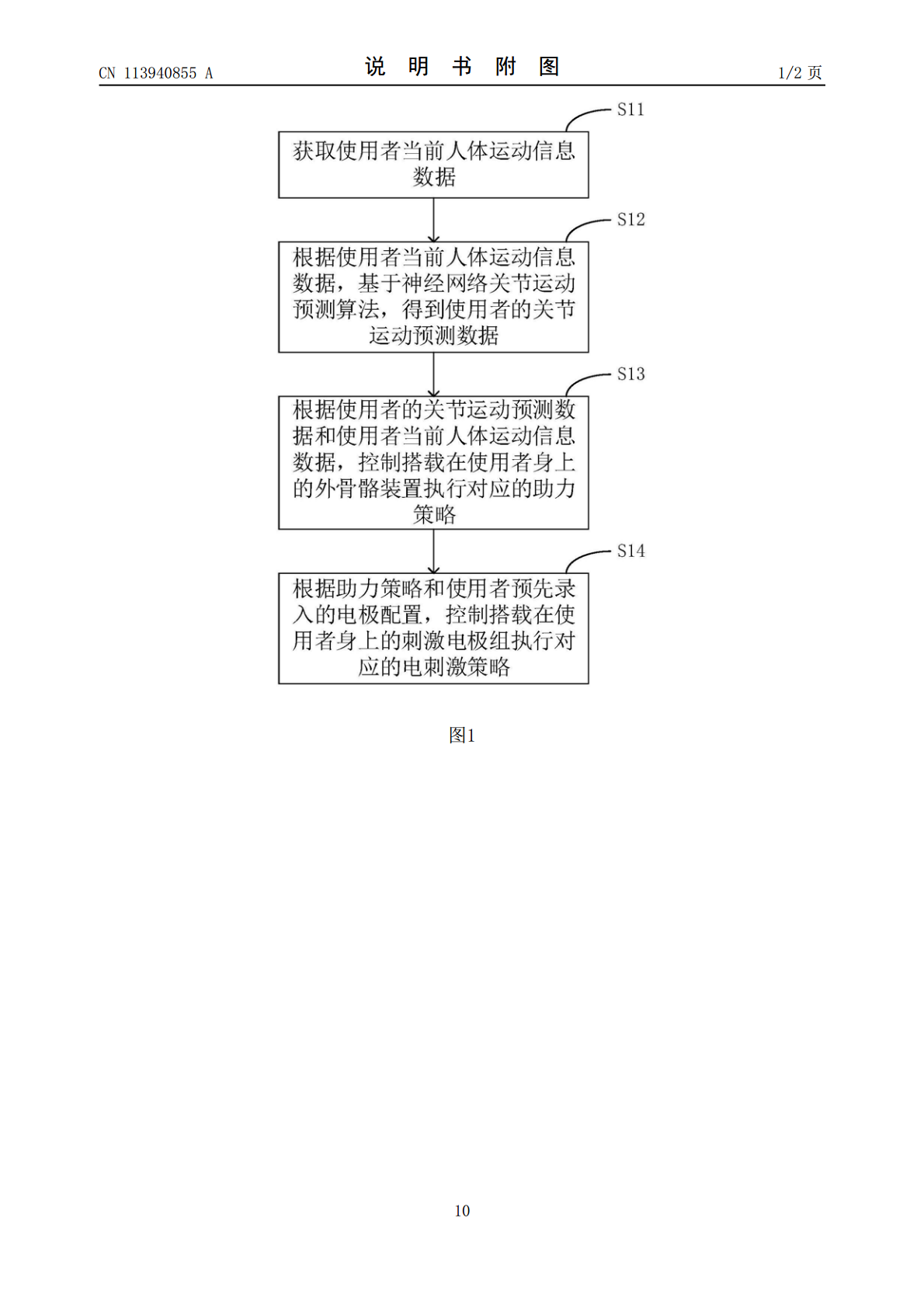
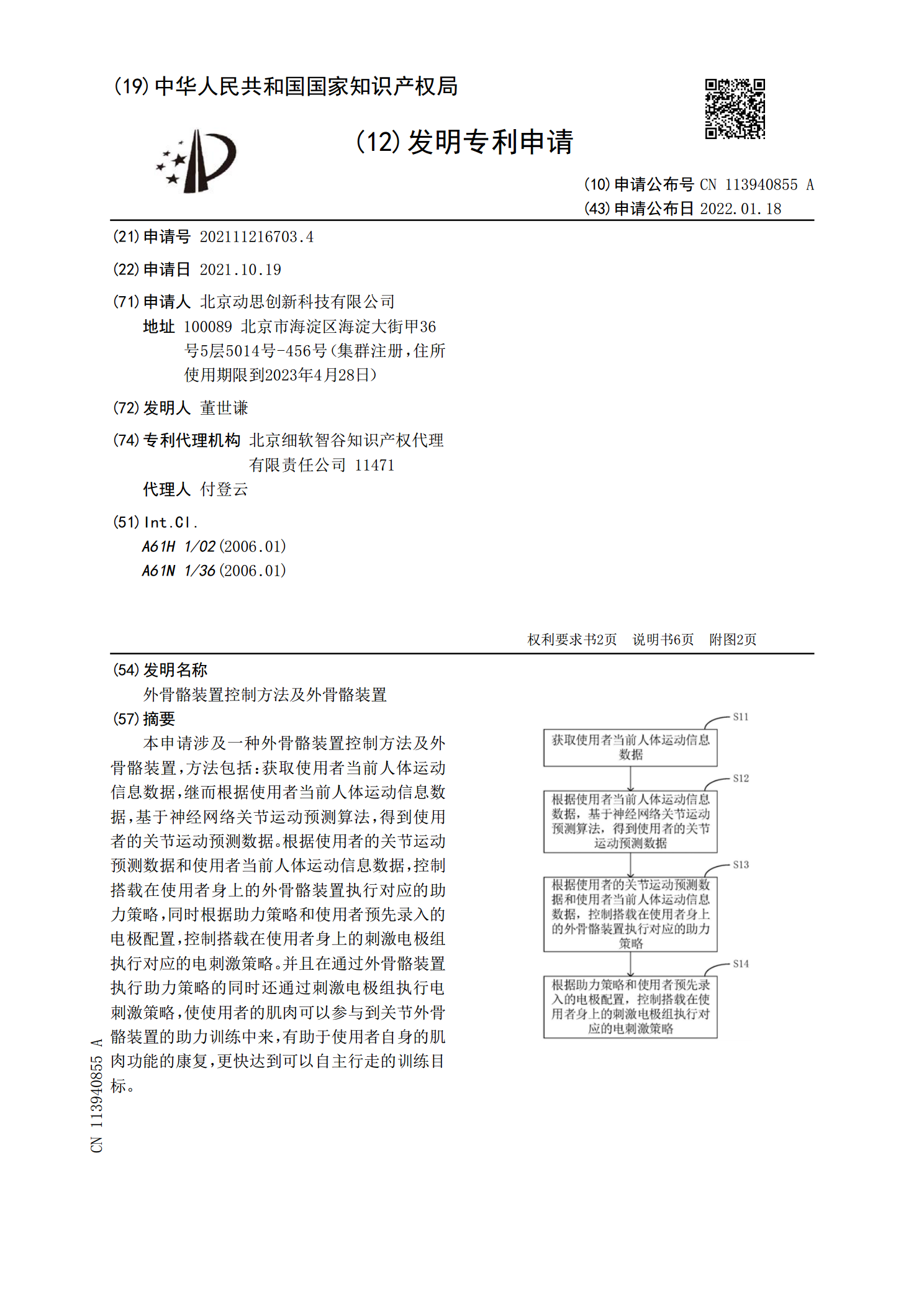
本申请涉及一种外骨骼装置控制方法及外骨骼装置,方法包括:获取使用者当前人体运动信息数据,继而根据使用者当前人体运动信息数据,基于神经网络关节运动预测算法,得到使用者的关节运动预测数据。根据使用者的关节运动预测数据和使用者当前人体运动信息数据,控制搭载在使用者身上的外骨骼装置执行对应的助力策略,同时根据助力策略和使用者预先录入的电极配置,控制搭载在使用者身上的刺激电极组执行对应的电刺激策略。并且在通过外骨骼装置执行助力策略的同时还通过刺激电极组执行电刺激策略,使使用者的肌肉可以参与到关节外骨骼装置的助力训练
外骨骼控制方法及装置.pdf
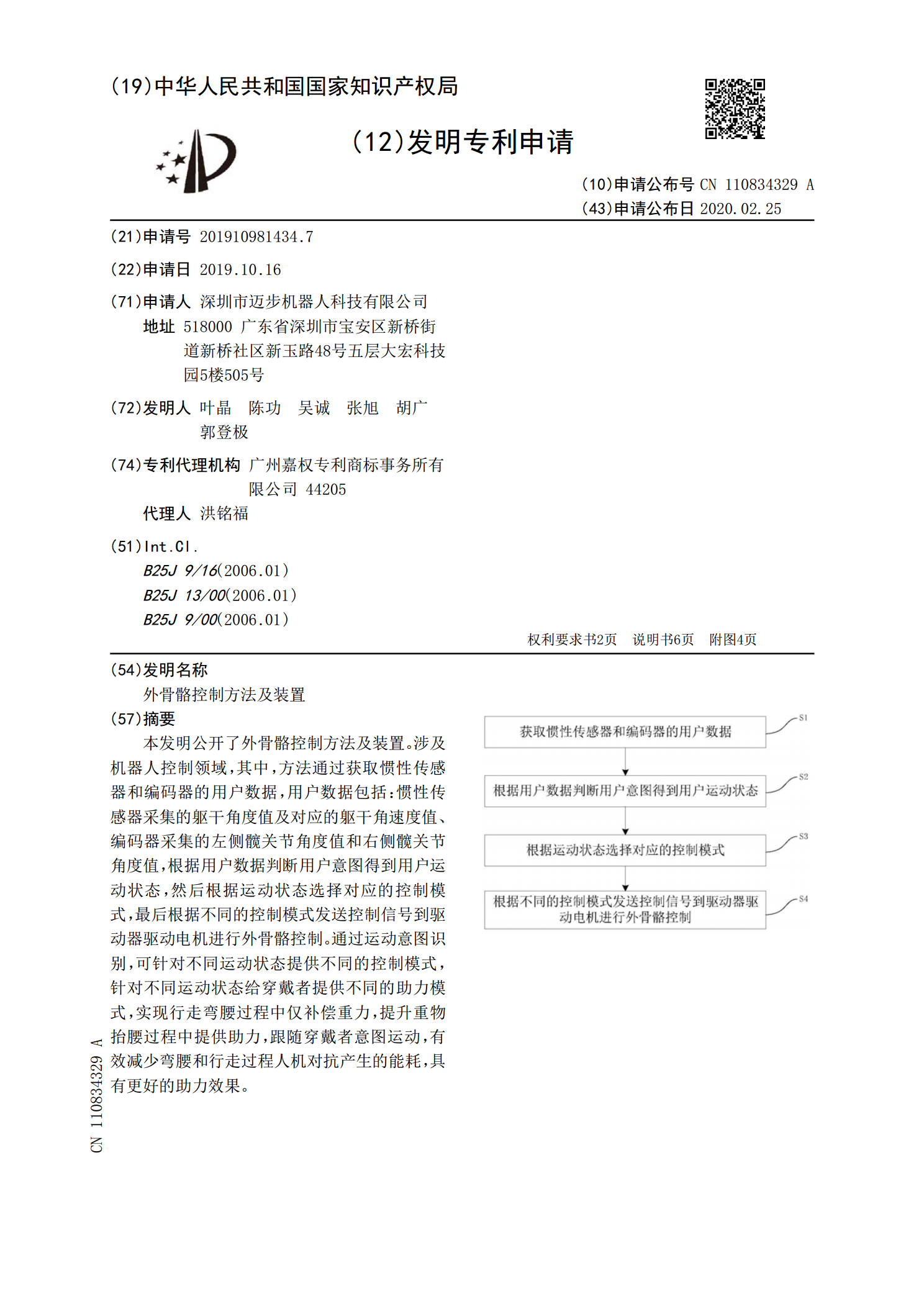
本发明公开了外骨骼控制方法及装置。涉及机器人控制领域,其中,方法通过获取惯性传感器和编码器的用户数据,用户数据包括:惯性传感器采集的躯干角度值及对应的躯干角速度值、编码器采集的左侧髋关节角度值和右侧髋关节角度值,根据用户数据判断用户意图得到用户运动状态,然后根据运动状态选择对应的控制模式,最后根据不同的控制模式发送控制信号到驱动器驱动电机进行外骨骼控制。通过运动意图识别,可针对不同运动状态提供不同的控制模式,针对不同运动状态给穿戴者提供不同的助力模式,实现行走弯腰过程中仅补偿重力,提升重物抬腰过程中提供助
下肢外骨骼控制方法及装置.pdf
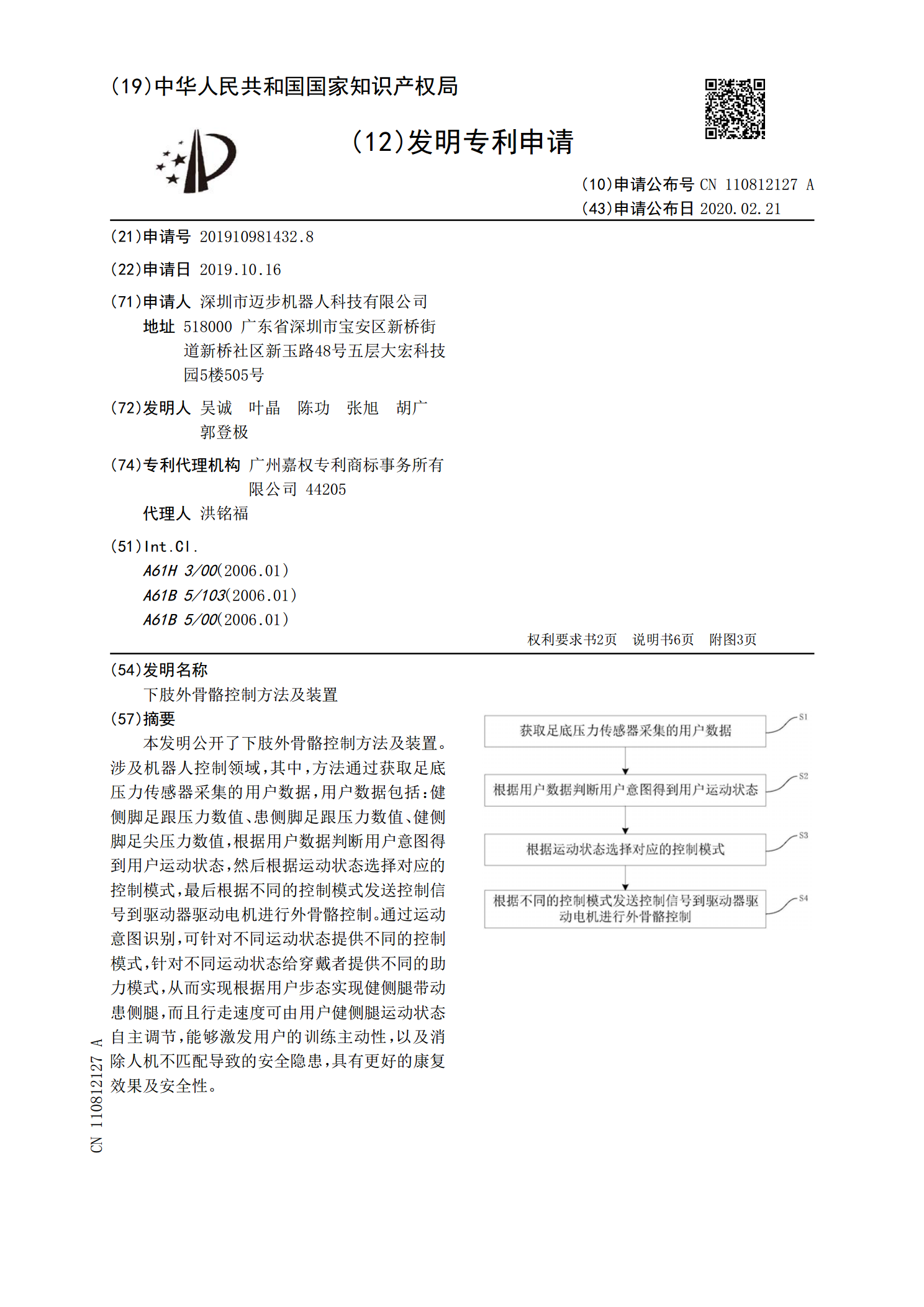
本发明公开了下肢外骨骼控制方法及装置。涉及机器人控制领域,其中,方法通过获取足底压力传感器采集的用户数据,用户数据包括:健侧脚足跟压力数值、患侧脚足跟压力数值、健侧脚足尖压力数值,根据用户数据判断用户意图得到用户运动状态,然后根据运动状态选择对应的控制模式,最后根据不同的控制模式发送控制信号到驱动器驱动电机进行外骨骼控制。通过运动意图识别,可针对不同运动状态提供不同的控制模式,针对不同运动状态给穿戴者提供不同的助力模式,从而实现根据用户步态实现健侧腿带动患侧腿,而且行走速度可由用户健侧腿运动状态自主调节,
一种外骨骼装置及外骨骼运动控制方法.pdf
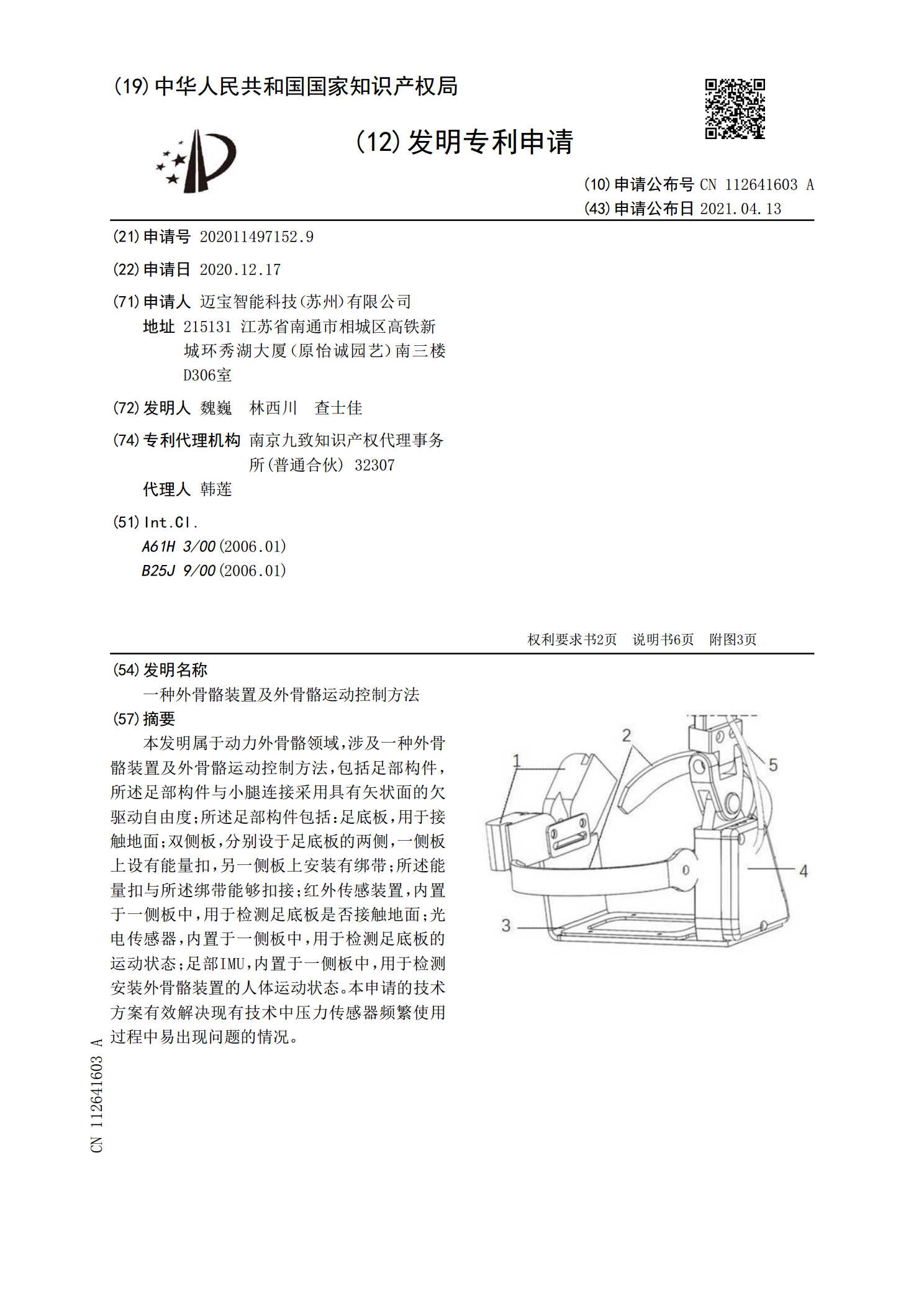
本发明属于动力外骨骼领域,涉及一种外骨骼装置及外骨骼运动控制方法,包括足部构件,所述足部构件与小腿连接采用具有矢状面的欠驱动自由度;所述足部构件包括:足底板,用于接触地面;双侧板,分别设于足底板的两侧,一侧板上设有能量扣,另一侧板上安装有绑带;所述能量扣与所述绑带能够扣接;红外传感装置,内置于一侧板中,用于检测足底板是否接触地面;光电传感器,内置于一侧板中,用于检测足底板的运动状态;足部IMU,内置于一侧板中,用于检测安装外骨骼装置的人体运动状态。本申请的技术方案有效解决现有技术中压力传感器频繁使用过程中

外骨骼健身装置和利用外骨骼健身装置的方法.pdf
本发明提供了外骨骼健身装置和利用外骨骼健身装置的方法,该外骨骼健身装置和方法特别地用于锻炼人体。该外骨骼健身装置包括:具有至少一个紧固构件的可穿戴结构,所述至少一个紧固构件构造成将可穿戴结构紧固至用户的身体;具有至少一个旋转轴线和至少一个自由度的至少一个机械关节,所述至少一个机械关节紧固至可穿戴结构;用于产生旋转阻力的至少一个单元,该旋转阻力阻碍所述至少一个机械关节的旋转运动;以及用于控制旋转阻力的控制器,其中,控制器配置成根据用户设定控制旋转阻力。