
一种基于卷积神经网络的实时车牌检测方法.pdf

海昌****姐淑


1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于卷积神经网络的实时车牌检测方法.pdf
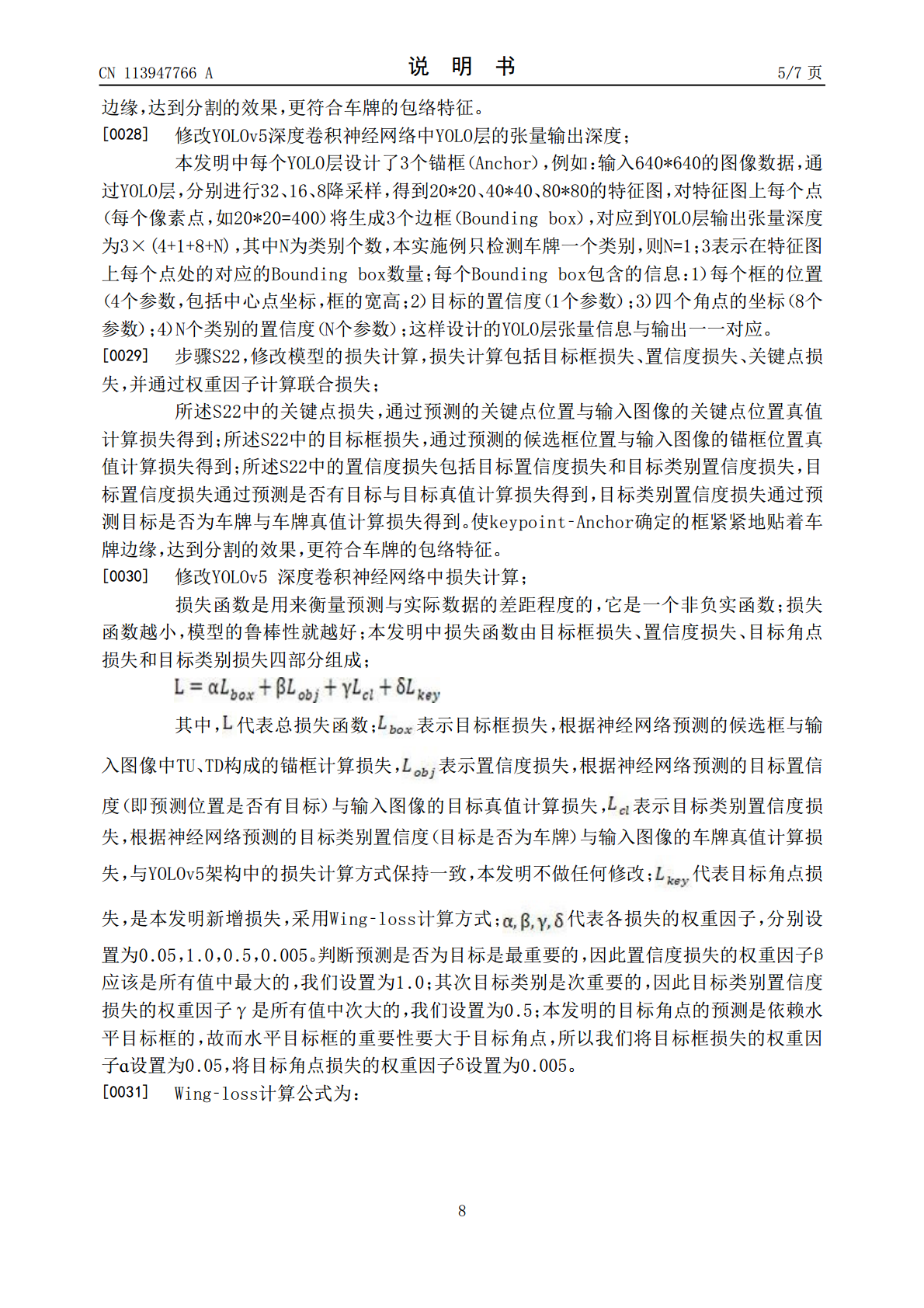
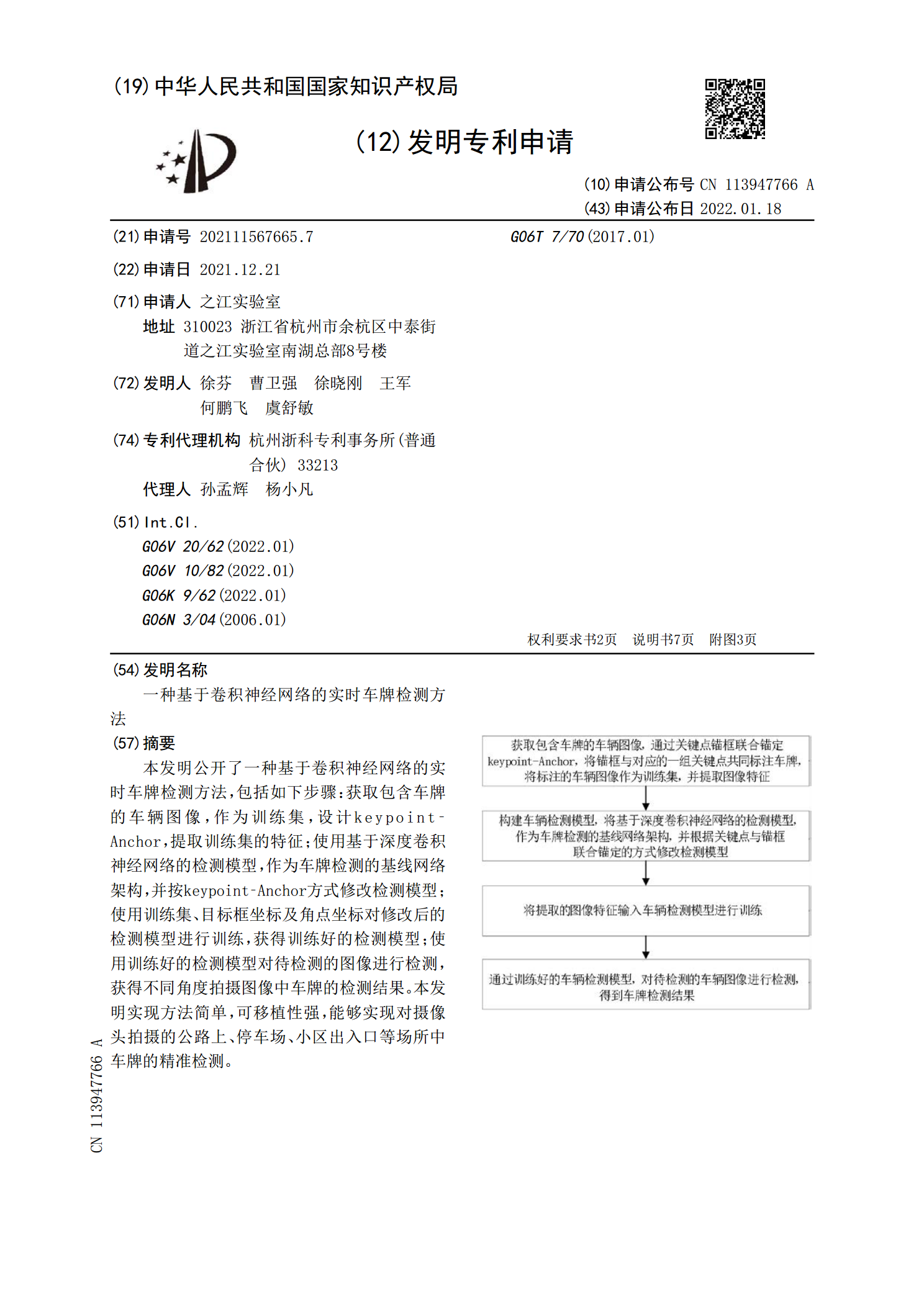
本发明公开了一种基于卷积神经网络的实时车牌检测方法,包括如下步骤:获取包含车牌的车辆图像,作为训练集,设计keypoint‑Anchor,提取训练集的特征;使用基于深度卷积神经网络的检测模型,作为车牌检测的基线网络架构,并按keypoint‑Anchor方式修改检测模型;使用训练集、目标框坐标及角点坐标对修改后的检测模型进行训练,获得训练好的检测模型;使用训练好的检测模型对待检测的图像进行检测,获得不同角度拍摄图像中车牌的检测结果。本发明实现方法简单,可移植性强,能够实现对摄像头拍摄的公路上、停车场、小区

一种基于卷积神经网络的目标边界实时检测方法.pdf
本发明公开一种基于卷积神经网络的目标边界实时检测方法,首先输入图片,提取该图片的特征图,预测边界框坐标和置信评分预测值。然后通过特征图得到引用边界框坐标,根据预测边界框坐标和引用边界框坐标计算出相关边界框坐标和实际边界框坐标,计算相关边界框和实际边界框的重叠值,对具有最大重叠部分的实际边界框设置最大重叠标记。最后根据重叠值,最大重叠标记和置信评分预测值计算引用边界框的置信评分,保留前N个具有最高置信评分的引用边界框,过滤其他边界框,得到最终结果。本发明将卷积神经网络用来提取特征图和作为输出层去计算边界框坐
一种基于双层卷积神经网络的重建车牌的方法.pdf
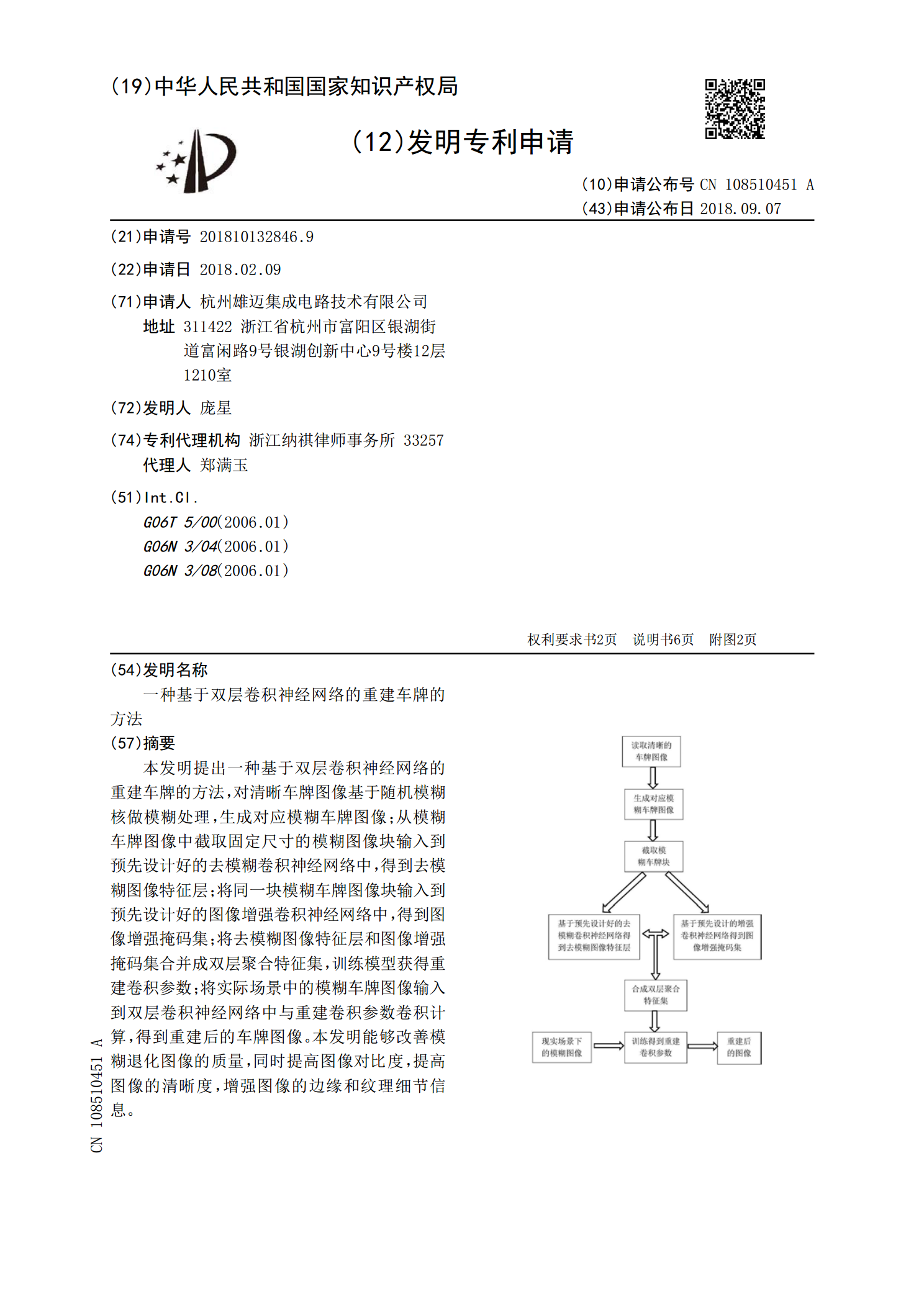
本发明提出一种基于双层卷积神经网络的重建车牌的方法,对清晰车牌图像基于随机模糊核做模糊处理,生成对应模糊车牌图像;从模糊车牌图像中截取固定尺寸的模糊图像块输入到预先设计好的去模糊卷积神经网络中,得到去模糊图像特征层;将同一块模糊车牌图像块输入到预先设计好的图像增强卷积神经网络中,得到图像增强掩码集;将去模糊图像特征层和图像增强掩码集合并成双层聚合特征集,训练模型获得重建卷积参数;将实际场景中的模糊车牌图像输入到双层卷积神经网络中与重建卷积参数卷积计算,得到重建后的车牌图像。本发明能够改善模糊退化图像的质量

基于卷积神经网络的解扭曲车牌检测识别方法.docx
基于卷积神经网络的解扭曲车牌检测识别方法基于卷积神经网络的解扭曲车牌检测识别方法摘要:车牌识别是计算机视觉和模式识别领域的一个重要研究方向,它在交通监控、智能交通系统等领域有着广泛的应用。然而,由于各种因素的影响,车牌图像往往存在一定程度的扭曲。本文基于卷积神经网络(CNN)提出了一种解扭曲车牌检测识别方法。关键词:车牌识别,卷积神经网络,扭曲车牌1.引言车牌识别是一项重要的技术,它可以用于交通违法行为的监控,车辆管理,智能交通系统等方面。然而,由于车牌图像在采集和传输过程中受到各种因素的影响,如成像设备
一种基于卷积神经网络的中文车牌识别方法.pdf
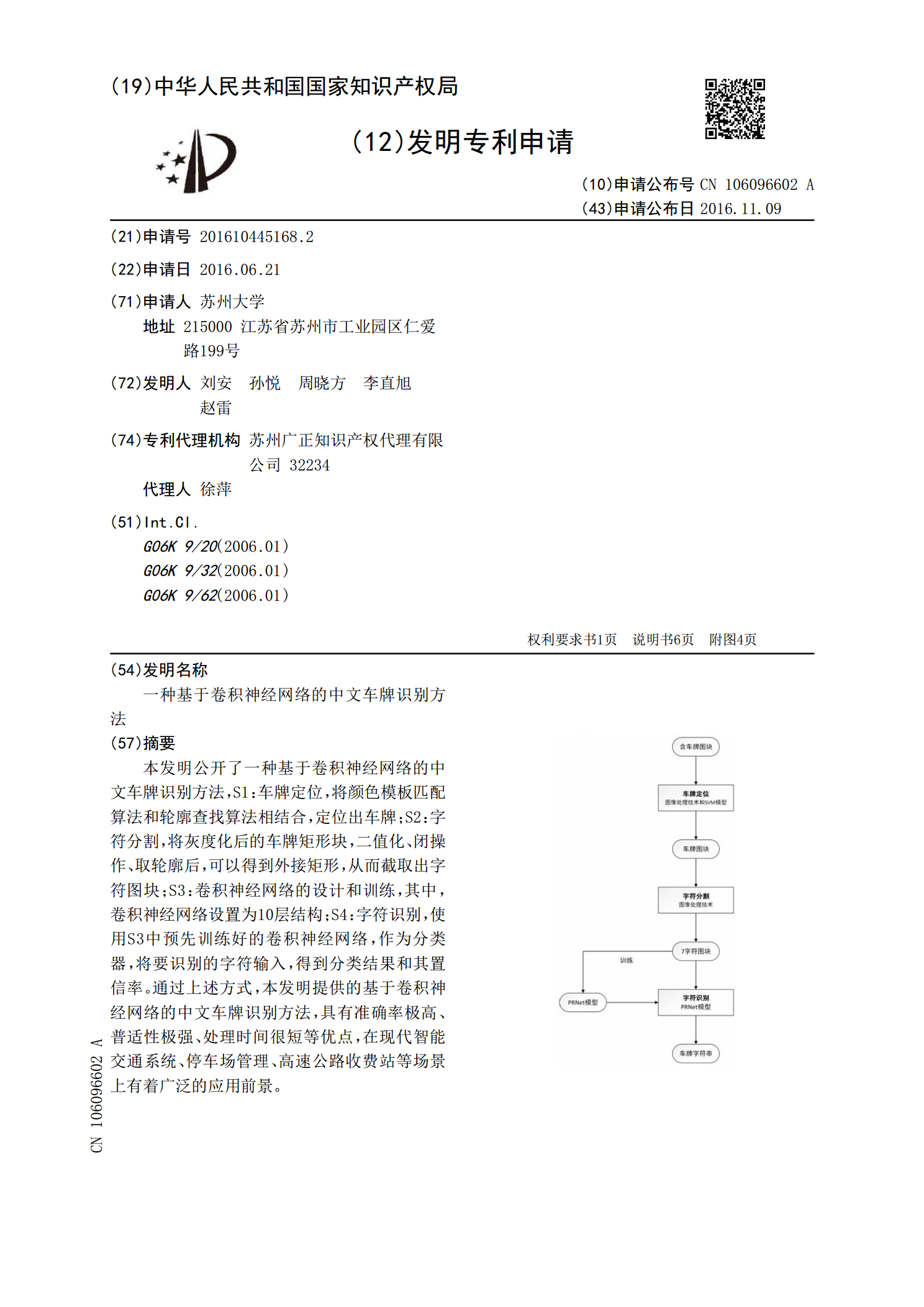
本发明公开了一种基于卷积神经网络的中文车牌识别方法,S1:车牌定位,将颜色模板匹配算法和轮廓查找算法相结合,定位出车牌;S2:字符分割,将灰度化后的车牌矩形块,二值化、闭操作、取轮廓后,可以得到外接矩形,从而截取出字符图块;S3:卷积神经网络的设计和训练,其中,卷积神经网络设置为10层结构;S4:字符识别,使用S3中预先训练好的卷积神经网络,作为分类器,将要识别的字符输入,得到分类结果和其置信率。通过上述方式,本发明提供的基于卷积神经网络的中文车牌识别方法,具有准确率极高、普适性极强、处理时间很短等优点,