
一种塔筒法兰平面度检测装备的图像采集方法.pdf

永香****能手

1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种塔筒法兰平面度检测装备的图像采集方法.pdf
本发明公开了一种塔筒法兰平面度检测装备的图像采集方法,包括垂直对中和图像采集两个阶段,垂直对中和图像采集均通过检测系统来完成;与现有技术相比,本发明的塔筒法兰平面度检测装备的图像采集方法,包括垂直对中和图像采集两个阶段,通过自动对中阶段使检测系统自动将旋转臂轴心和法兰圆心对齐,以达到3D工业相机的最佳视野和工作距离,在图像采集阶段,旋转臂带动3D工业相机旋转,对目标法兰进行全覆盖式激光线扫描以得到海量点云数据,旋转一周,即可获得激光线扫描区域的点云数据。

塔筒法兰平面度测量规范.doc
北京泛泰克斯仪器有限公司风电服务中心地址:南京市山西路8号金山大厦A-1102室E-mail:junqing.liu@vantechinst.com电话:025-83478649/83478651/83478653传真:608塔筒法兰平面度测量规范(含内倾度)北京泛泰克斯仪器有限公司Easy-laserTM风电服务中心一、概述该规范适用于所有风力发电行业的塔筒法兰平面度(含内倾度)的测量。.在风电行业塔筒制造过程中,法兰平面度(含内倾度)是一项非常重要的几何指标,它将直接影

塔筒法兰平面度测量规范.docx
塔筒法兰平面度测量规范(含内倾度)北京泛泰克斯仪器有限公司Easy-laserTM风电服务中心一、概述该规范适用于所有风力发电行业的塔筒法兰平面度(含内倾度)的测量。.在风电行业塔筒制造过程中,法兰平面度(含内倾度)是一项非常重要的几何指标,它将直接影响两法兰之间的结合程度及塔筒预紧状态。为适应我国高速发展的风电业,特制定本规范。供业内工程技术人员参考。.二、测量工具建议使用瑞典DamaliniAB公司制造的Easy-laserTMD600(或D800,D670,W401,W402均可),软件使用Easy

一种磁吸式塔筒法兰平面数据采集装置.pdf
一种磁吸式塔筒法兰平面数据采集装置,涉及风电塔筒生产检测技术领域。前述磁吸式塔筒法兰平面数据采集装置包括通过磁力吸附在塔筒外壁上并能够绕其周面移动的移动单元以及用于采集法兰端面的平面数据的检测单元,检测单元安装在移动单元上并在移动单元的带动下沿法兰周向移动以采集法兰端面的平面数据。上述磁吸式塔筒法兰平面数据采集装置结构简单,操作方便,尺寸小,在各个待测塔筒法兰之间搬运起来十分方便,占用空间也小。
一种风电塔筒法兰平面度测量辅助装置.pdf
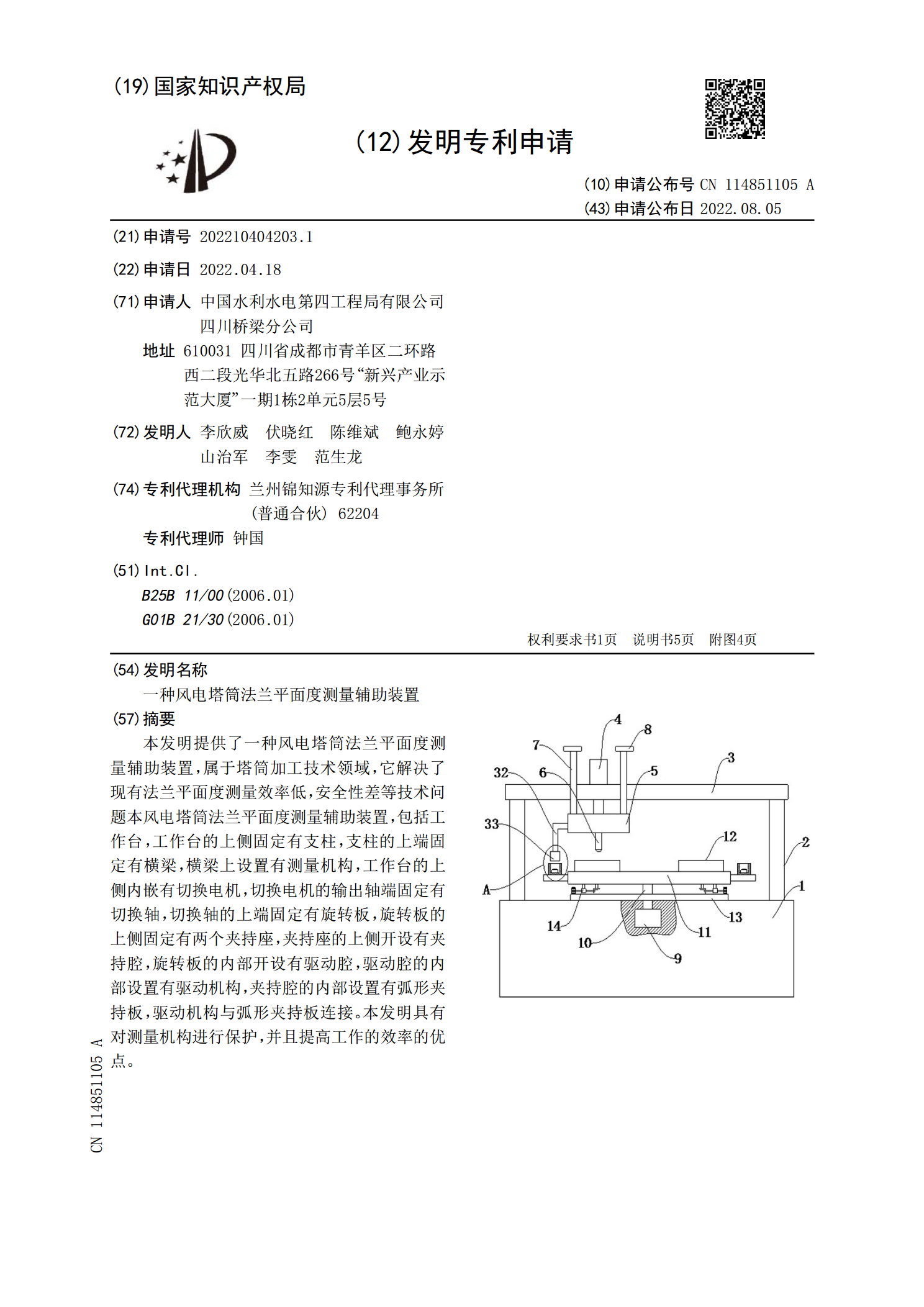
本发明提供了一种风电塔筒法兰平面度测量辅助装置,属于塔筒加工技术领域,它解决了现有法兰平面度测量效率低,安全性差等技术问题本风电塔筒法兰平面度测量辅助装置,包括工作台,工作台的上侧固定有支柱,支柱的上端固定有横梁,横梁上设置有测量机构,工作台的上侧内嵌有切换电机,切换电机的输出轴端固定有切换轴,切换轴的上端固定有旋转板,旋转板的上侧固定有两个夹持座,夹持座的上侧开设有夹持腔,旋转板的内部开设有驱动腔,驱动腔的内部设置有驱动机构,夹持腔的内部设置有弧形夹持板,驱动机构与弧形夹持板连接。本发明具有对测量机构进